
“Toward real-time object manipulation in dynamic environments”

Conference:
Type(s):
Title:
- Toward real-time object manipulation in dynamic environments
Presenter(s)/Author(s):
Abstract:
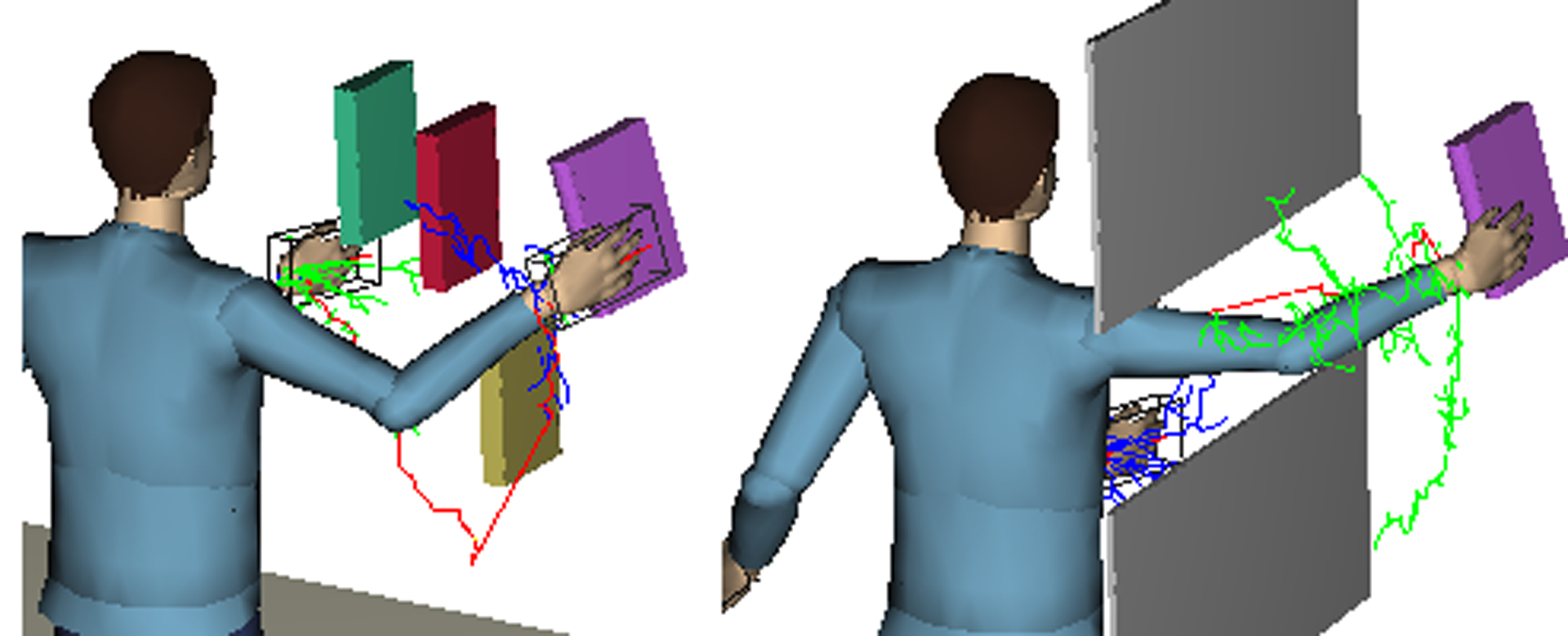
In most interactive applications of virtual characters such as computer games and VR training, existing motion planners are not capable of computing grasping motions in real time, especially in realistic dynamic environments. This work proposes a learning-based motion planner that achieves improved performance by integrating the ability to reuse learned reaching and grasping skills on new tasks. Extensive tests show that our approach, the Attractor-Guided Planner (AGP), greatly improves the planning time and solution quality when comparing to traditional sampling-based motion planners.
References:
1. Kallmann, M. 2005. Scalable solutions for Interactive Virtual Humans that can Manipulate Objects. In AIIDE 2005.
2. Kuffner, J. J., and Lavalle, S. M. 2000. RRT-Connect: An Efficient Approach to Single-Query Path Planning. In ICRA 2000.