
“Real-time and physically realistic simulation of global deformation” by Zhuang and Canny
Conference:
Type(s):
Talk Type(s):
Title:
- Real-time and physically realistic simulation of global deformation
Session/Category Title:
- Simulation for Animation
Presenter(s)/Author(s):
Moderator(s):
Interest Area:
- Production & Animation
Abstract:
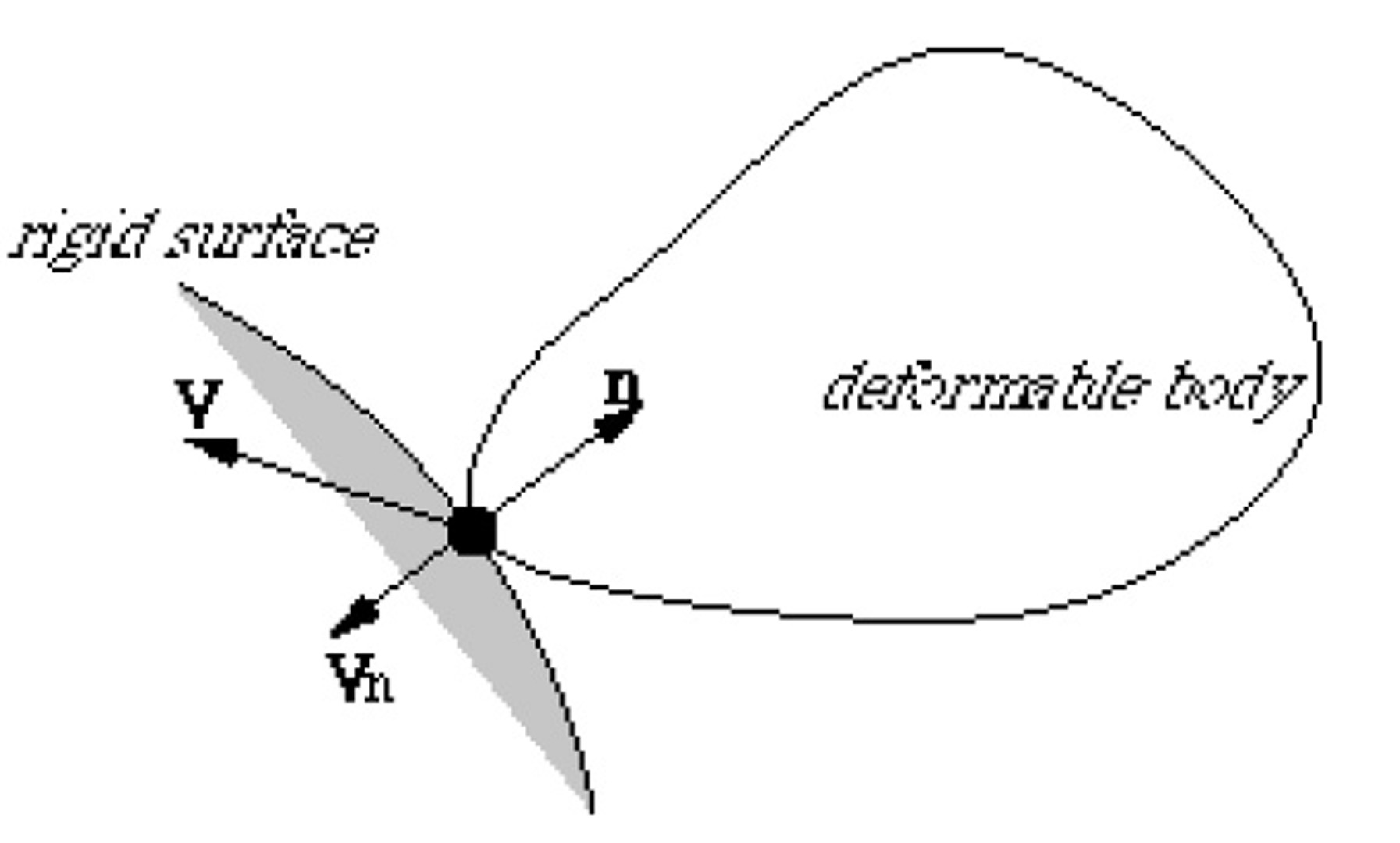
Application of graded nonlinear FEM to simulate global deformation of 3D flexible objects in real time and a simple, efficient collisiontime-integration scheme.
References:
1. David Baraff and Andrew Witkin. Dynamic Simulation of Non-Penetrating Flexible Bodies, Computer Graphics: Proceedings of SIGGRAPH, pages 303—08, ACM, 1992.
2. Edward John Nicolson.Tactile Sensing and Control of a Planar Manipulator, PhD thesis, EECS, University of California, Berkeley, 1987.
3. D.Terzopoulos, J. Platt, A. Barr, and K. Fleischer. Elastically Deformable Models, Computer Graphics, 21, July 1987.
ACM Digital Library Publication:
Overview Page:
Submit a story:
If you would like to submit a story about this presentation, please contact us: historyarchives@siggraph.org