
“MetaLimbs: Metamorphosis for Multiple Arms Interaction using Artificial Limbs” by Sasaki, Saraiji, Fernando, Minamizawa and Inami
Conference:
Type(s):
Title:
- MetaLimbs: Metamorphosis for Multiple Arms Interaction using Artificial Limbs
Presenter(s)/Author(s):
Entry Number:
- 55
Abstract:
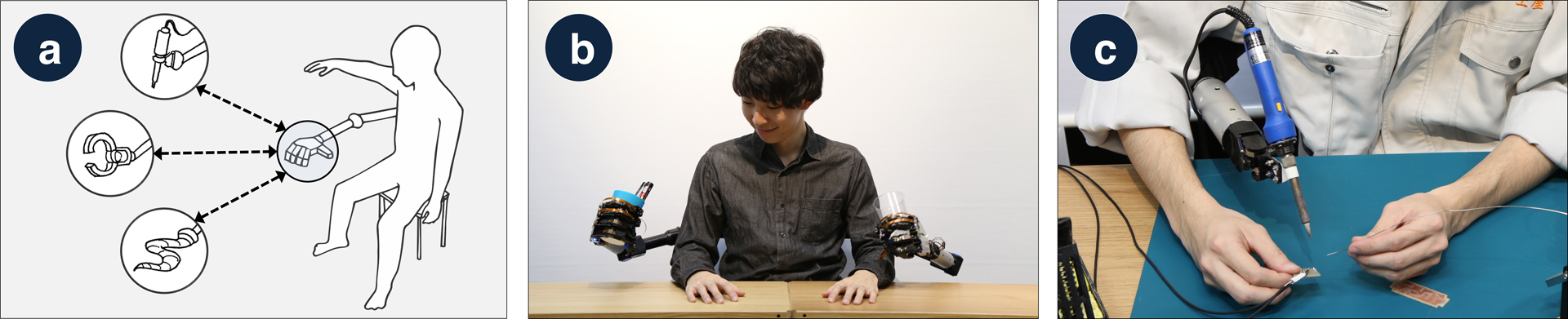
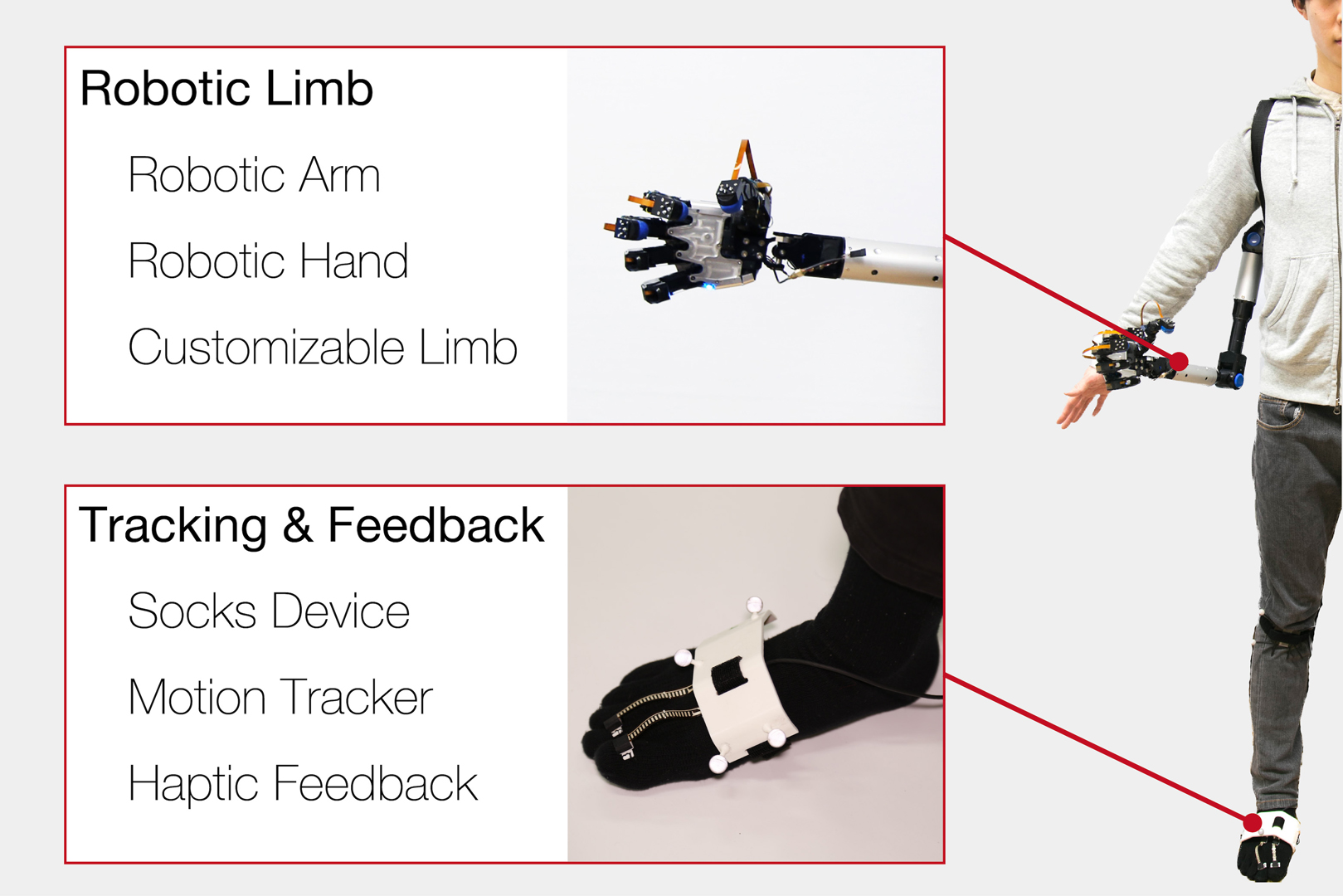
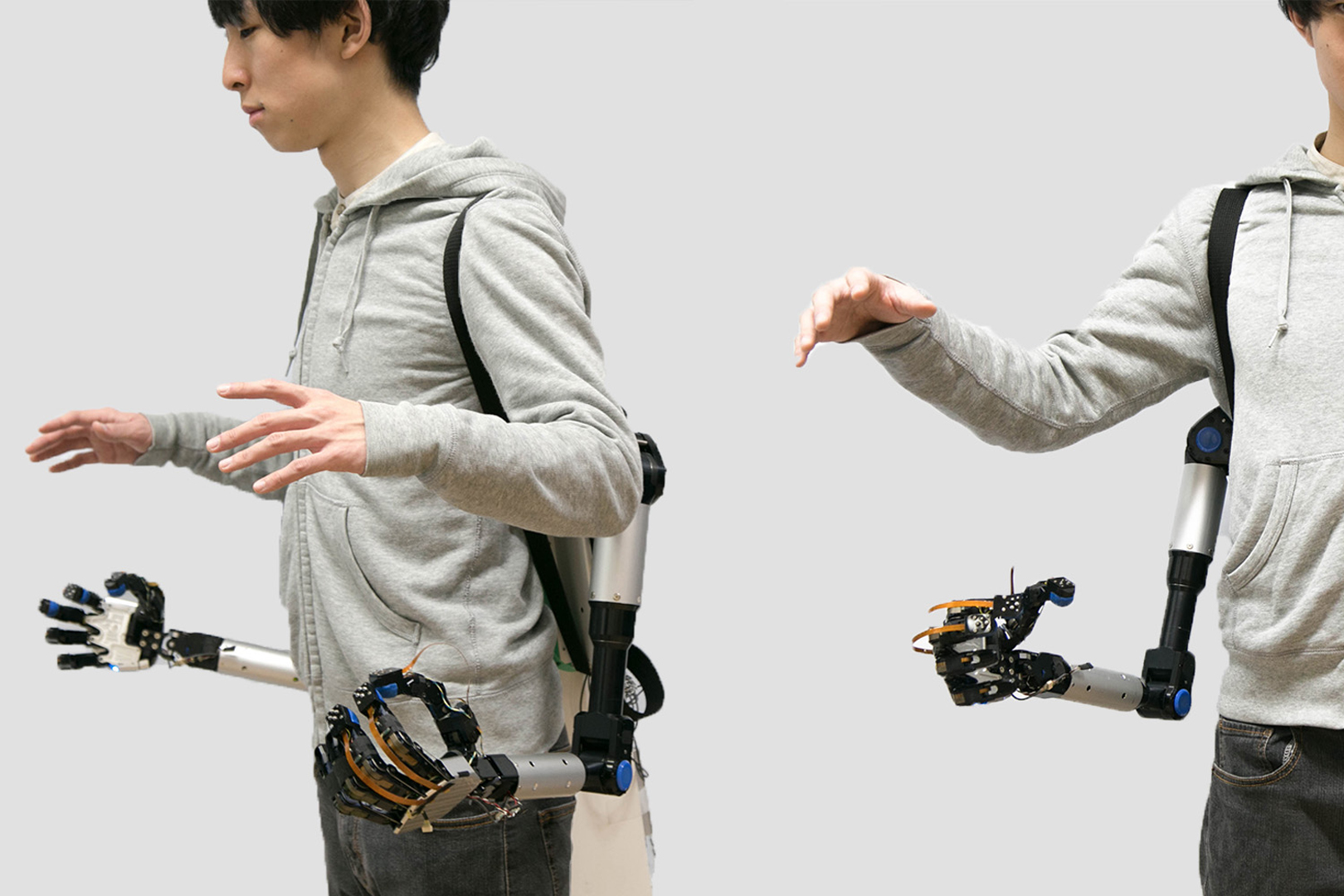
If we could have the capability to edit or customize our body scheme by technology, could our abilities and activities be enhanced? This research proposes a novel interaction to alternate body scheme using artificial limbs substitution metamorphosis. In this work, two additional robotic arms are added to user’s body, and are manipulated by legs movement. Limbs control is achieved using two sets of tracking systems: global motion tracking of legs using an optical tracker and local motion tracking for manipulation purposes using socks type device. These data are mapped into artificial limbs’ arms, hands and fingers motion. Lastly, force feedback is provided to the feet and mapped to manipulator’s touch sensors.
Keyword(s):
Acknowledgements:
This project is supported by JSPS KAKENHI Grant Number 15H01701.