
“Locomotion control for many-muscle humanoids” by Lee, Park, Kwon and Lee
Conference:
Type(s):
Title:
- Locomotion control for many-muscle humanoids
Session/Category Title:
- Character Animation
Presenter(s)/Author(s):
Abstract:
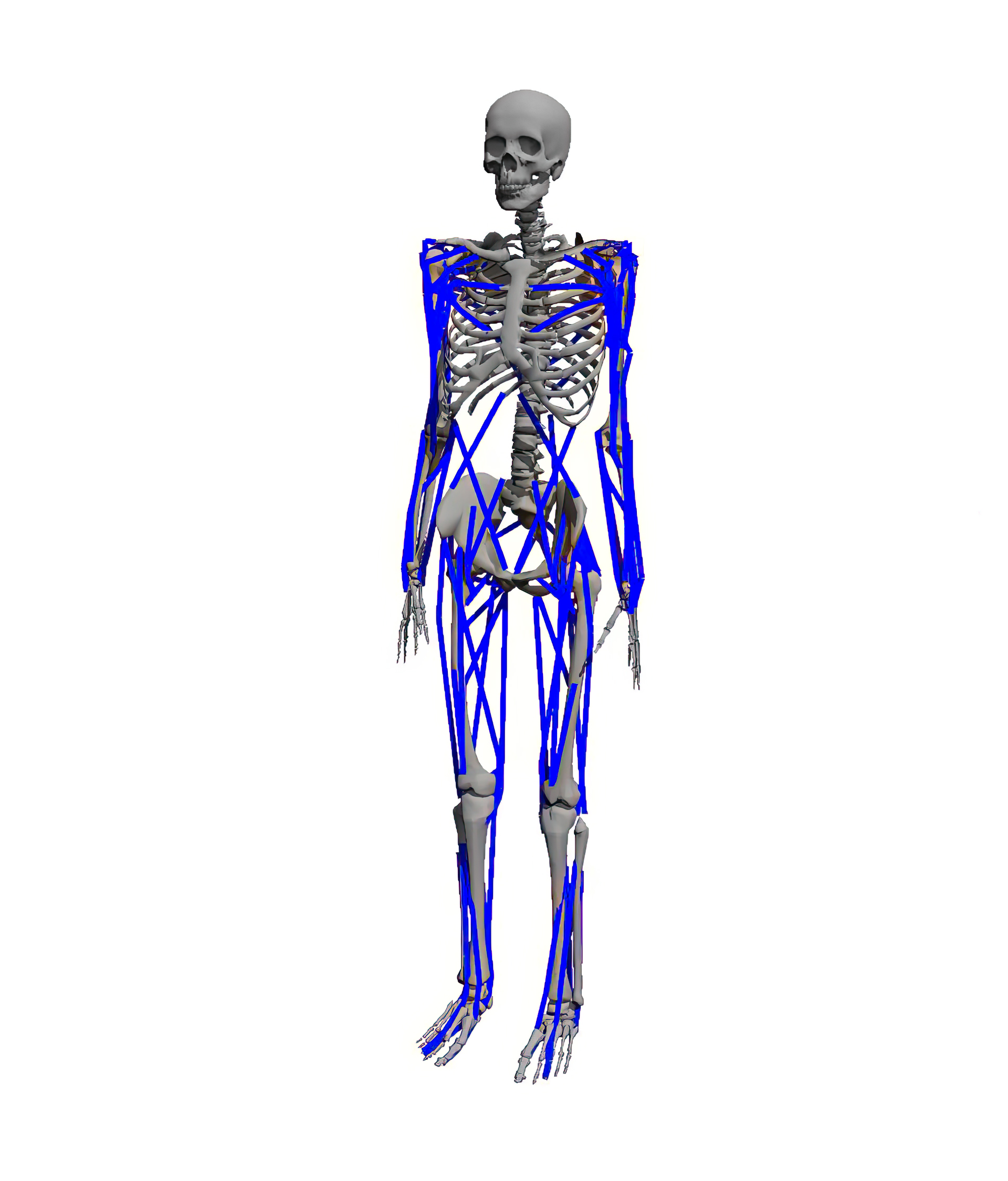
We present a biped locomotion controller for humanoid models actuated by more than a hundred Hill-type muscles. The key component of the controller is our novel algorithm that can cope with step-based biped locomotion balancing and the coordination of many nonlinear Hill-type muscles simultaneously. Minimum effort muscle activations are calculated based on muscle contraction dynamics and online quadratic programming. Our controller can faithfully reproduce a variety of realistic biped gaits (e.g., normal walk, quick steps, and fast run) and adapt the gaits to varying conditions (e.g., muscle weakness, tightness, joint dislocation, and external pushes) and goals (e.g., pain reduction and efficiency maximization). We demonstrate the robustness and versatility of our controller with examples that can only be achieved using highly-detailed musculoskeletal models with many muscles.
References:
1. Abe, Y., da Silva, M., and Popović, J. 2007. Multiobjective control with frictional contacts. In Proc. Symp. on Computer Animation, 249–258.
2. Ainsworth, B. E., Haskell, W. L., Herrmann, S. D., Meckes, N., Bassett, David R, J., Tudor-Locke, C., Greer, J. L., Vezina, J., Whitt-Glover, M. C., and Leon, A. S. 2011. 2011 compendium of physical activities: a second update of codes and MET values. Medicine and science in sports and exercise 43, 8, 1575–1581.
3. AL Borno, M., De Lasa, M., and Hertzmann, A. 2013. Trajectory optimization for full-body movements with complex contacts. IEEE Trans. Vis. Comput. Graph 19, 8, 1405–1414.
4. Anderson, F. C., and Pandy, M. G. 1999. A dynamic optimization solution for vertical jumping in three dimensions. Computer Methods in Biomechanics and Biomedical Engineering 2, 3, 201–231.Cross Ref
5. Anderson, F. C., and Pandy, M. G. 2001. Dynamic optimization of human walking. Journal of Biomechanical Engineering 123, 5, 381–390.Cross Ref
6. Brown, D. F., Macchietto, A., Yin, K., and Zordan, V. 2013. Control of rotational dynamics for ground behaviors. In Proc. Symp. on Computer Animation, 55–61.
7. Coros, S., Beaudoin, P., and Panne, M. v. d. 2010. Generalized biped walking control. ACM Trans. Graph. (SIGGRAPH 2010) 29, 4.
8. da Silva, M., Abe, Y., and Popović, J. 2008. Interactive simulation of stylized human locomotion. ACM Trans. Graph. (SIGGRAPH 2008) 27, 3.
9. de Lasa, M., Mordatch, I., and Hertzmann, A. 2010. Feature-based locomotion controllers. ACM Trans. Graph. (SIGGRAPH 2010) 29, 4.
10. de Sapio, V., Warren, J., Khatib, O., and Delp, S. 2005. Simulating the task-level control of human motion: a methodology and framework for implementation. The Visual Computer 21, 5, 289–302.
11. Delp, S. L., Loan, J. P., Hoy, M. G., Zajac, F. E., Topp, E. L., and Rosen, J. M. 1990. An interactive graphics-based model of the lower extremity to study orthopaedic surgical procedures. IEEE Trans. on Biomedical Engineering 37, 8, 757–767.Cross Ref
12. Delp, S. L., Anderson, F. C., Arnold, A. S., Loan, P., Habib, A., John, C. T., Guendelman, E., and Thelen, D. G. 2007. OpenSim: open-source software to create and analyze dynamic simulations of movement. IEEE Trans. on Biomedical Engineering 54, 11, 1940–1950.Cross Ref
13. Demircan, E., Khatib, O., Wheeler, J., and Delp, S. 2009. Reconstruction and EMG-informed control, simulation and analysis of human movement for athletics: Performance improvement and injury prevention. In Proc. IEEE Engineering in Medicine and Biology Society, 6534–6537.
14. DiLorenzo, P. C., Zordan, V. B., and Sanders, B. L. 2008. Laughing out loud: control for modeling anatomically inspired laughter using audio. ACM Trans. Graph. (SIGGRAPH Asia 2008) 27, 5.
15. Geijtenbeek, T., van de Panne, M., and van der Stappen, A. F. 2013. Flexible muscle-based locomotion for bipedal creatures. ACM Trans. Graph. (SIGGRAPH Asia 2013) 32, 6.
16. Hansen, N. 2006. The CMA evolution strategy: A comparing review. In Towards a New Evolutionary Computation, vol. 192 of Studies in Fuzziness and Soft Computing. 75–102.
17. Hodgins, J. K., Wooten, W. L., Brogan, D. C., and O’Brien, J. F. 1995. Animating human athletics. In Proc. SIGGRAPH 95, 71–78.
18. Kwon, T., and Hodgins, J. K. 2010. Control systems for human running using an inverted pendulum model and a reference motion capture sequence. In Proc. Symp. on Computer Animation, 129–138.
19. Lee, S.-H., and Terzopoulos, D. 2006. Heads up!: biomechanical modeling and neuromuscular control of the neck. ACM Trans. Graph. (SIGGRAPH 2006) 25, 3.
20. Lee, S.-H., Sifakis, E., and Terzopoulos, D. 2009. Comprehensive biomechanical modeling and simulation of the upper body. ACM Trans. Graph. 28, 4.
21. Lee, Y., Kim, S., and Lee, J. 2010. Data-driven biped control. ACM Trans. Graph. (SIGGRAPH 2010) 29, 4.
22. Liu, L., Yin, K., van de Panne, M., and Guo, B. 2012. Terrain runner: control, parameterization, composition, and planning for highly dynamic motions. ACM Trans. Graph. (SIGGRAPH Asia 2012) 31, 6.
23. Macchietto, A., Zordan, V., and Shelton, C. R. 2009. Momentum control for balance. ACM Trans. Graph. (SIGGRAPH 2009) 28, 3.
24. Mordatch, I., Lasa, M. d., and Hertzmann, A. 2010. Robust physics-based locomotion using low-dimensional planning. ACM Trans. Graph. (SIGGRAPH 2010) 29, 4.
25. Mordatch, I., Wang, J. M., Todorov, E., and Koltun, V. 2013. Animating human lower limbs using contact-invariant optimization. ACM Trans. Graph. (SIGGRAPH Asia 2013) 32, 6.
26. Muico, U., Lee, Y., Popović, J., and Popović, Z. 2009. Contact-aware nonlinear control of dynamic characters. ACM Trans. Graph. (SIGGRAPH 2009) 28, 3.
27. Park, F. C., Bobrow, J. E., and Ploen, S. R. 1995. A lie group formulation of robot dynamics. The International Journal of Robotics Research 14, 6, 609–618.
28. Schutte, L. M. 1993. Using musculoskeletal models to explore strategies for improving performance in electrical stimulation-induced leg cycle ergometry. PhD thesis, Stanford University.
29. Sifakis, E., Neverov, I., and Fedkiw, R. 2005. Automatic determination of facial muscle activations from sparse motion capture marker data. ACM Trans. Graph. (SIGGRAPH 2005) 24, 3.
30. SNU Motion Database, 2013. http://mrl.snu.ac.kr/~mdb/.
31. Sok, K. W., Kim, M., and Lee, J. 2007. Simulating biped behaviors from human motion data. ACM Trans. Graph. (SIGGRAPH 2007) 26, 3.
32. Steele, K., and Hamner, S., 2013. Dynamic arms 2013, https://simtk.org/home/arm2013.
33. Sueda, S., Kaufman, A., and Pai, D. K. 2008. Musculotendon simulation for hand animation. ACM Trans. Graph. (SIGGRAPH 2008) 27, 3.
34. Tan, J., Gu, Y., Turk, G., and Liu, C. K. 2011. Articulated swimming creatures. ACM Trans. Graph. (SIGGRAPH 2011) 30, 4.
35. Teran, J., Sifakis, E., Blemker, S. S., Ng-Thow-Hing, V., Lau, C., and Fedkiw, R. 2005. Creating and simulating skeletal muscle from the visible human data set. IEEE Trans. Vis. Comput. Graph 11, 3, 317–328.
36. Thelen, D. G., and Anderson, F. C. 2006. Using computed muscle control to generate forward dynamic simulations of human walking from experimental data. Journal of Biomechanics 39, 6, 1107–1115.Cross Ref
37. Thelen, D. G. 2003. Adjustment of muscle mechanics model parameters to simulate dynamic contractions in older adults. Journal of Biomechanical Engineering 125, 1, 70–77.Cross Ref
38. Tsai, Y.-Y., Lin, W.-C., Cheng, K. B., Lee, J., and Lee, T.-Y. 2010. Real-time physics-based 3D biped character animation using an inverted pendulum model. IEEE Trans. Vis. Comput. Graph 16, 2, 325–337.
39. Wang, J. M., Fleet, D. J., and Hertzmann, A. 2010. Optimizing walking controllers for uncertain inputs and environments. ACM Trans. Graph. (SIGGRAPH 2010) 29, 4.
40. Wang, J. M., Hamner, S. R., Delp, S. L., and Koltun, V. 2012. Optimizing locomotion controllers using biologically-based actuators and objectives. ACM Trans. Graph. (SIGGRAPH 2012) 31, 4.
41. Wu, J.-C., and Popović, Z. 2010. Terrain-adaptive bipedal locomotion control. ACM Trans. Graph. (SIGGRAPH 2010) 29, 4.
42. Ye, Y., and Liu, C. K. 2010. Optimal feedback control for character animation using an abstract model. ACM Trans. Graph. (SIGGRAPH 2010) 29, 4.
43. Yin, K., Loken, K., and Panne, M. v. d. 2007. SIMBICON: simple biped locomotion control. ACM Trans. Graph. (SIGGRAPH 2007) 26, 3.
44. Zajac, F. E. 1989. Muscle and tendon: properties, models, scaling, and application to biomechanics and motor control. Critical Reviews in Biomedical Engineering 17, 4, 359–411.