
“Learning Human-like Locomotion Based on Biological Actuation and Rewards” by Kim and Lee
Conference:
Type(s):
Title:
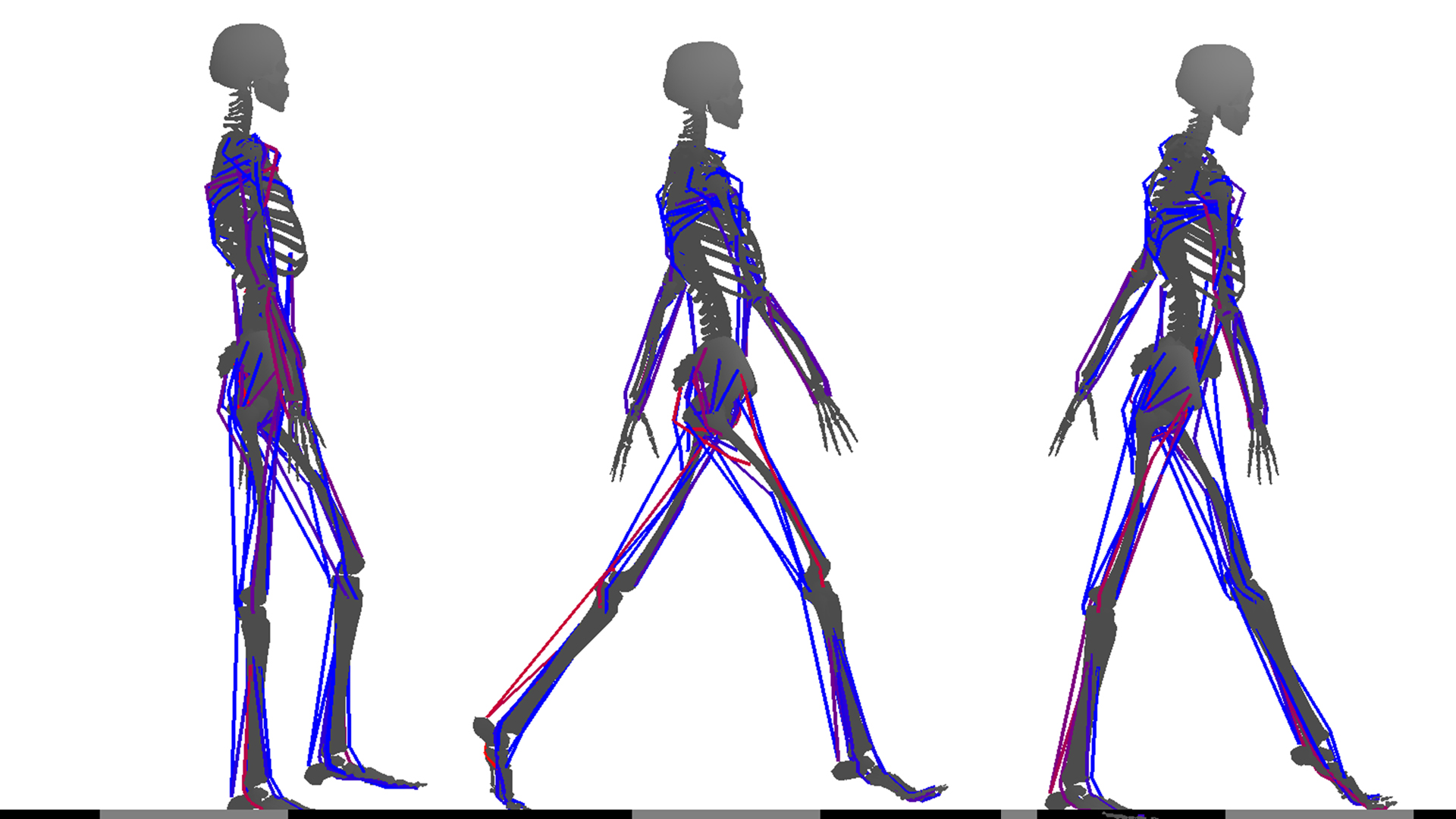
- Learning Human-like Locomotion Based on Biological Actuation and Rewards
Session/Category Title:
- Posters: Animation & Simulation
Presenter(s)/Author(s):
Entry Number:
- 05
Abstract:
We propose a method of learning a policy for human-like locomotion via deep reinforcement learning based on a human anatomical model, muscle actuation, and biologically inspired rewards, without any inherent control rules or reference motions.
ACM Digital Library Publication:
Overview Page:
Submit a story:
If you would like to submit a story about this presentation, please contact us: historyarchives@siggraph.org