
“Depth from Focus for 3D Reconstruction by Iteratively Building Uniformly Focused Image Set” by Salokhiddinov and Lee

Conference:
Type(s):
Title:
- Depth from Focus for 3D Reconstruction by Iteratively Building Uniformly Focused Image Set
Presenter(s)/Author(s):
Entry Number:
- 60
Abstract:
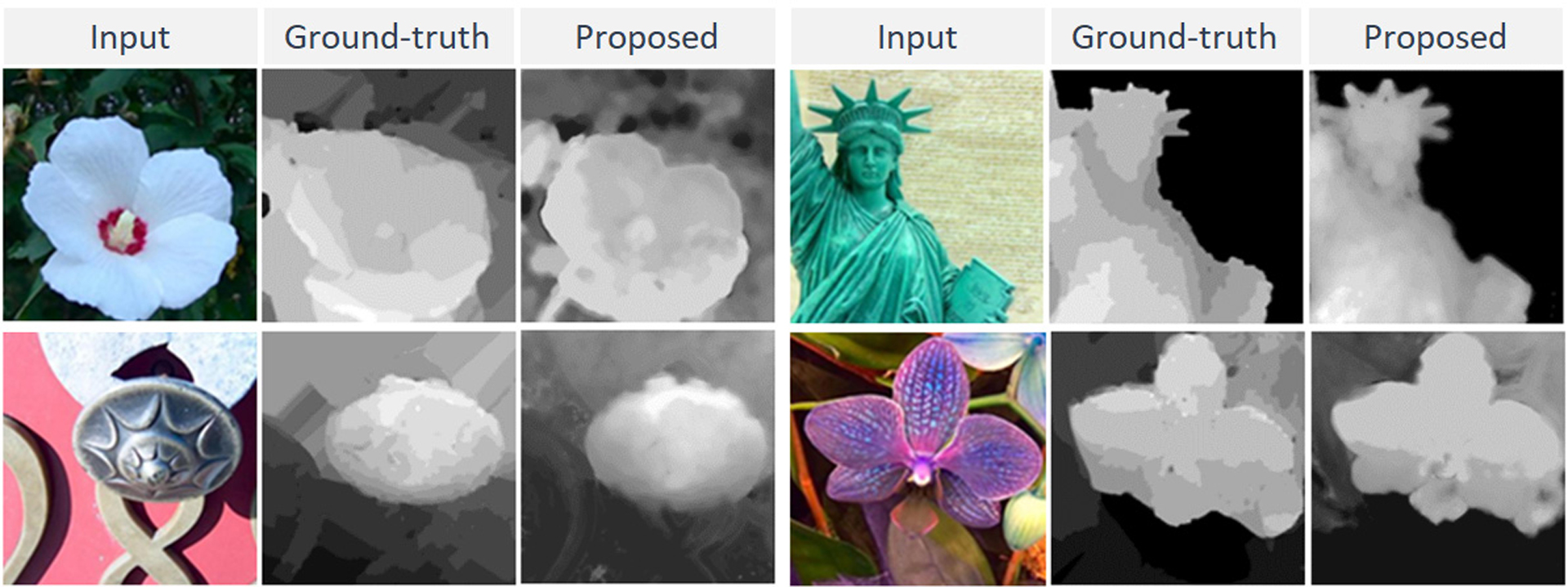
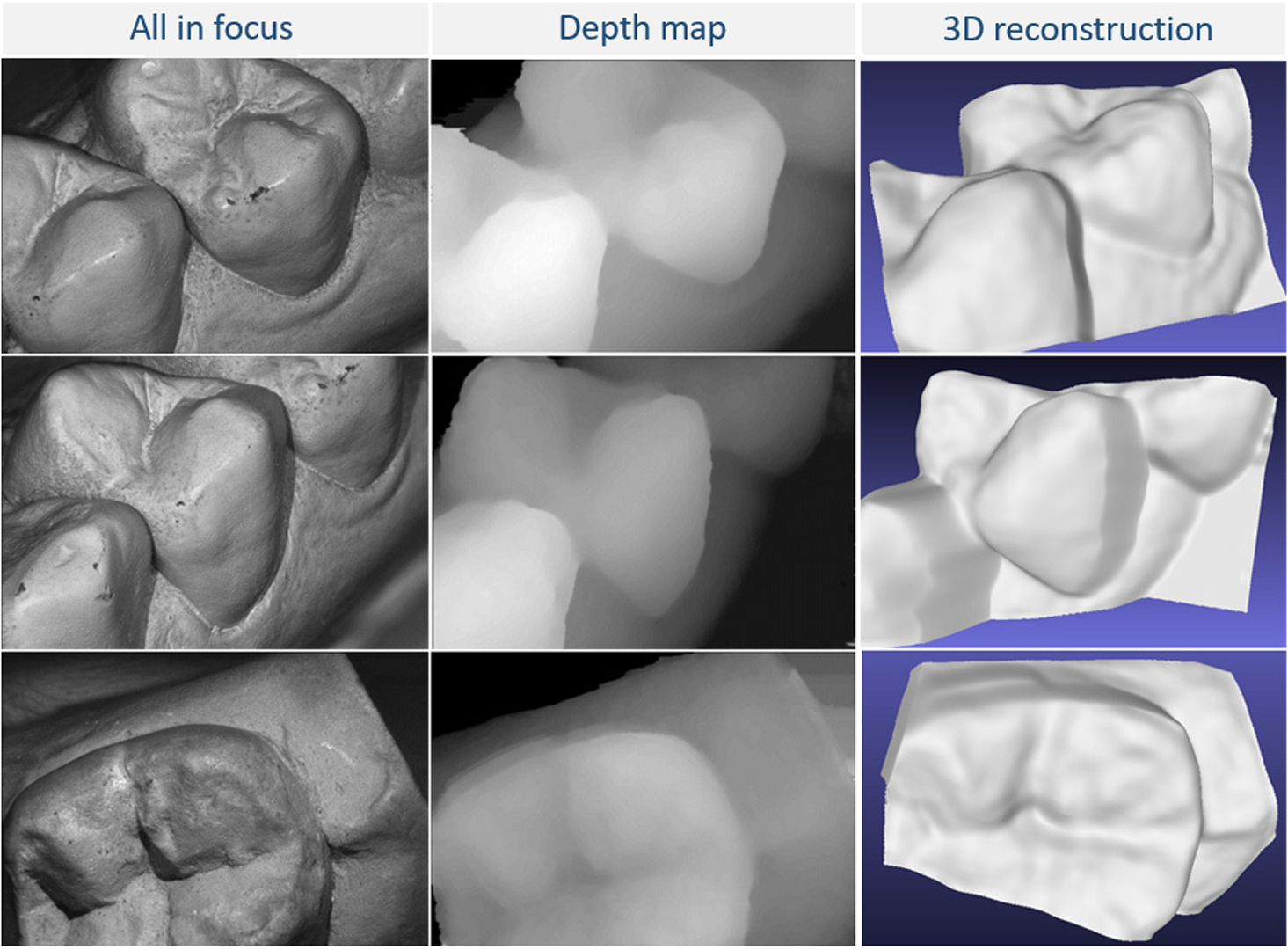
Depth estimation from a differently focused set of images has been a practical approach for 3D reconstruction with existing color cameras. In this paper, we propose a depth from focus (DFF) method for accurate depth estimation using single commodity color camera. We investigate the appearance changes in spatial and frequency domain along the focused image frames in iterative manner. In order to achieve sub-frame level accuracy in depth estimation, optimal location of in-focus frame is estimated by fitting a parameterized polynomial curve on the dissimilarity measurements of each pixel. Quantitative and qualitative evaluations on various test image sets show promising performance of the proposed method in depth estimation.
References:
- Steven C. Chapra. 2012. Applied Numerical Methods with MATLAB for Engineers and Scientists. Raghothaman Srinivasan, Chapter Curve Fitting.
- Nianyi Li, Jinwei Ye, Yu Ji, Haibin Ling, and Jingyi Yu. 2014. Saliency detection on light field. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2806–2813.
- Niloy J Mitra and An Nguyen. 2003. Estimating surface normals in noisy point cloud data. In Proceedings of the nineteenth annual symposium on Computational geometry. ACM, 322–328.
- Michael Moeller, Martin Benning, Carola Schonlieb, and Daniel Cremers. 2015. Varia- ¨ tional depth from focus reconstruction. IEEE Transactions on Image Processing 24, 12 (2015), 5369–5378.
- Supasorn Suwajanakorn, Carlos Hernandez, and Steven M Seitz. 2015. Depth from focus with your mobile phone. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 3497–3506.
Keyword(s):
PDF:
ACM Digital Library Publication:
Overview Page:
Submit a story:
If you would like to submit a story about this presentation, please contact us: historyarchives@siggraph.org