
“Haptic Telexistence” by Sato, Minamizawa, Kawakami and Tachi
Conference:
Experience Type(s):
Title:
- Haptic Telexistence
Entry Number: 12
Organizer(s)/Presenter(s):
Description:
Executive Summary
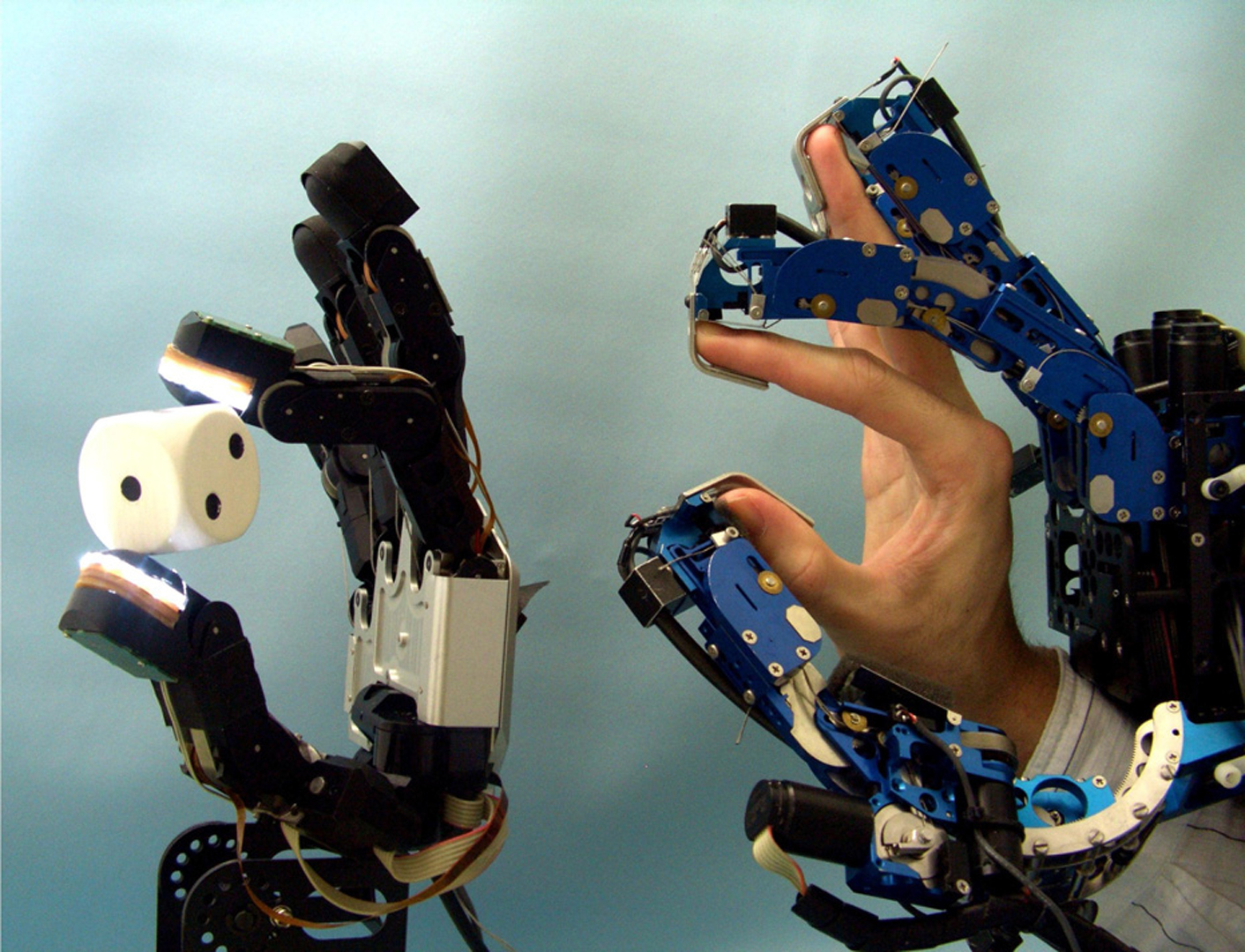
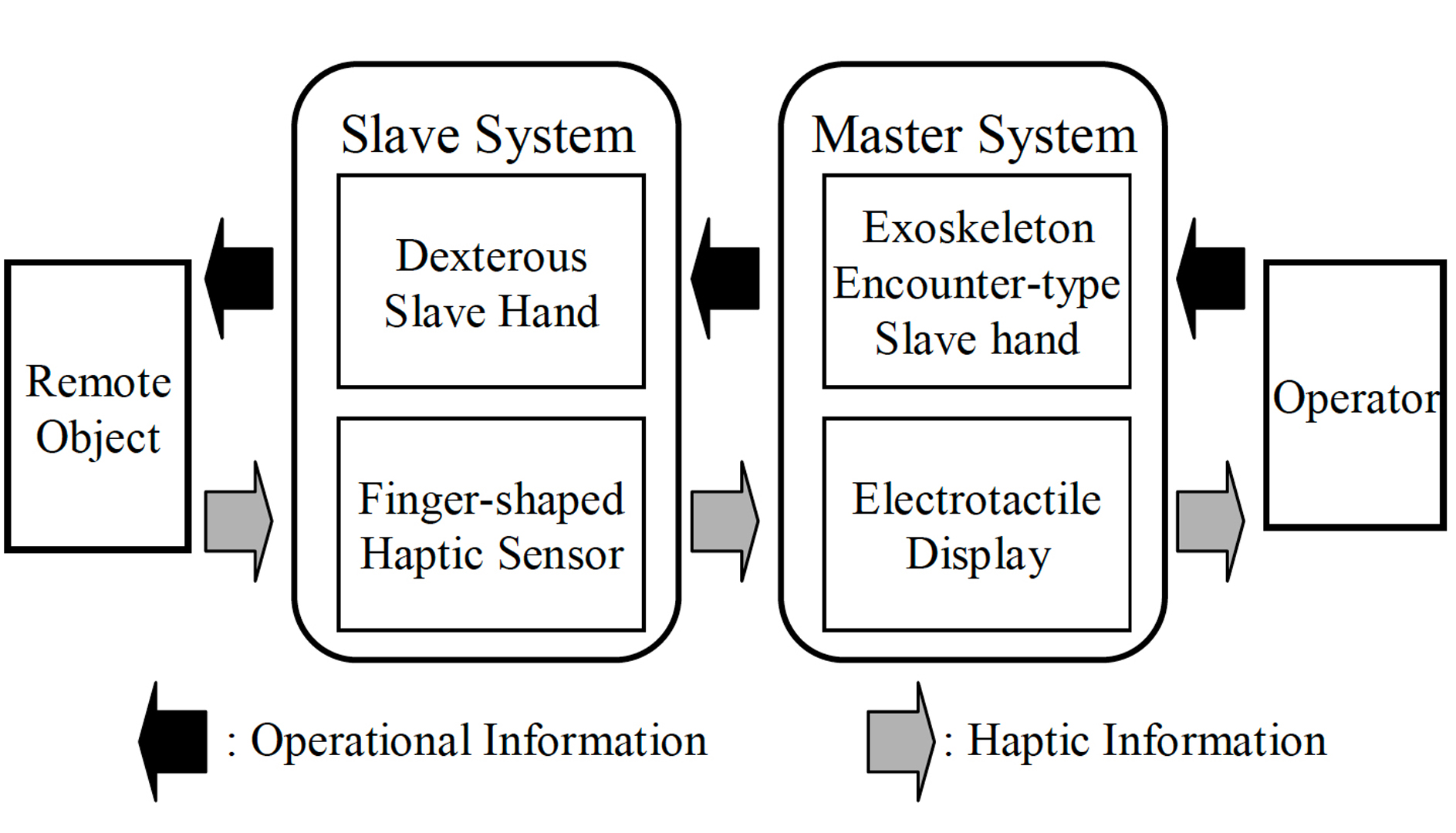
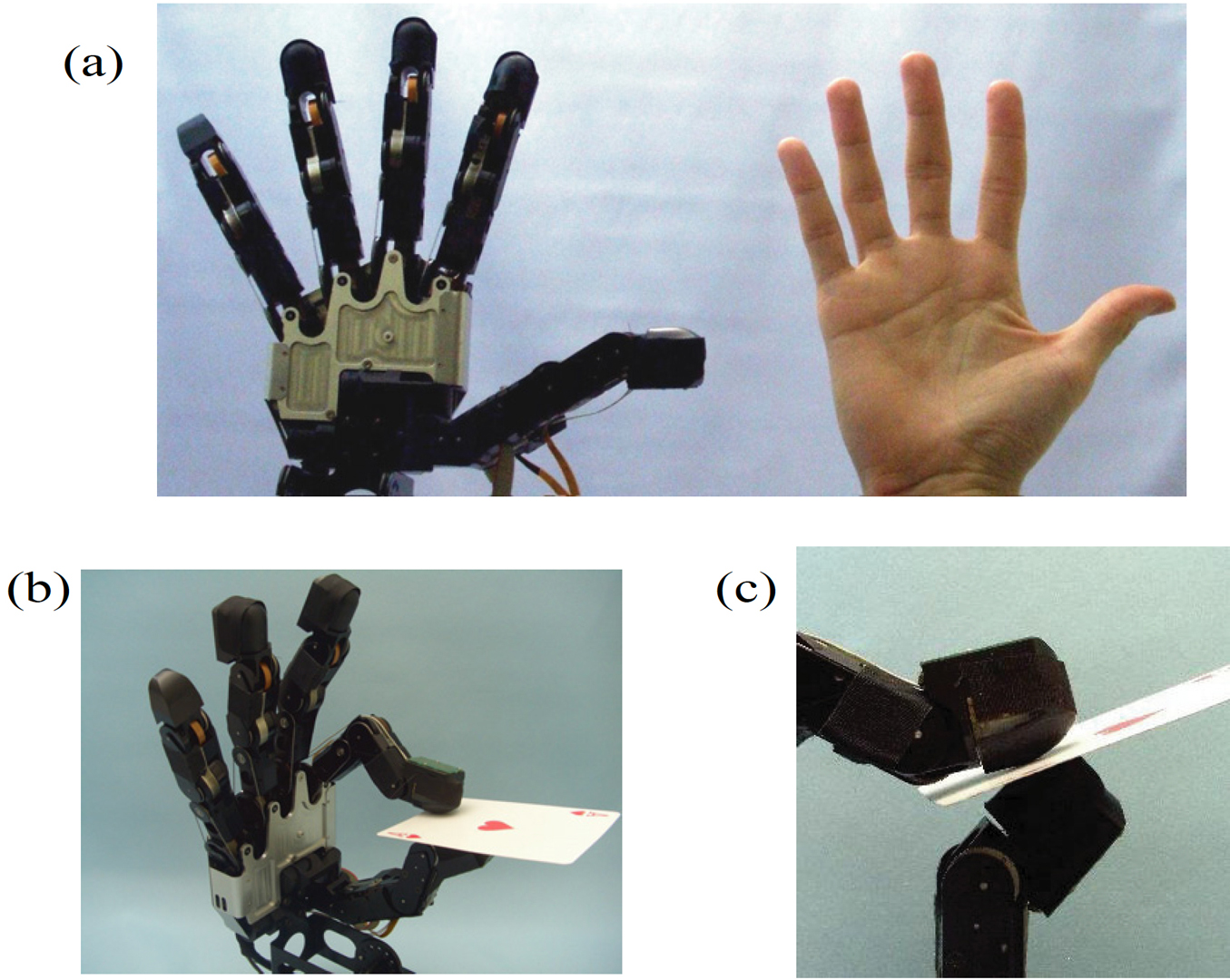
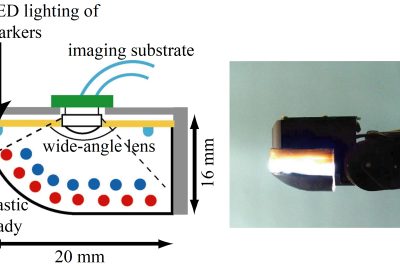
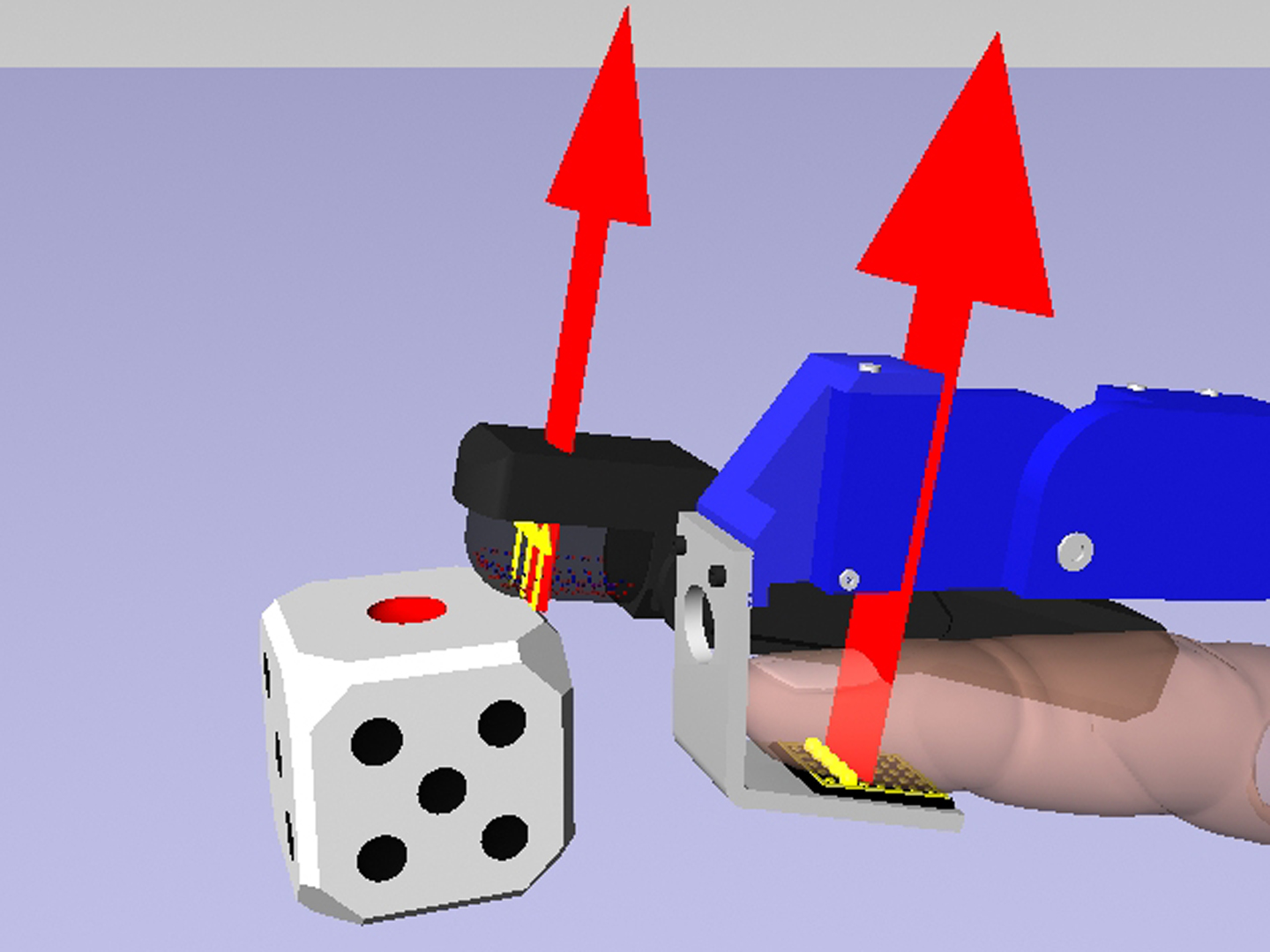
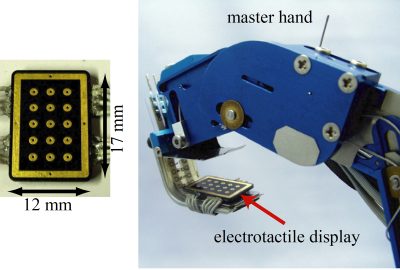
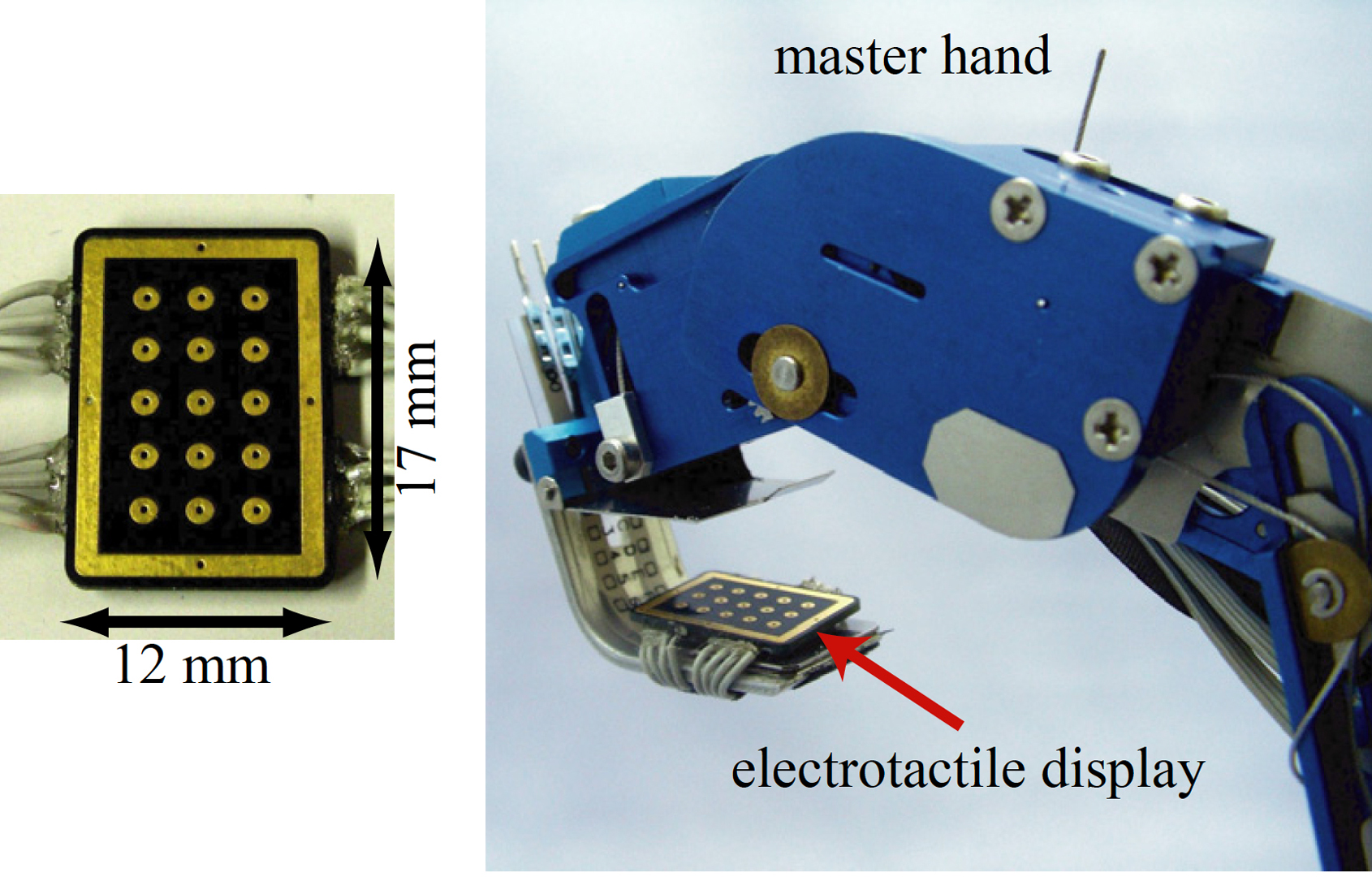
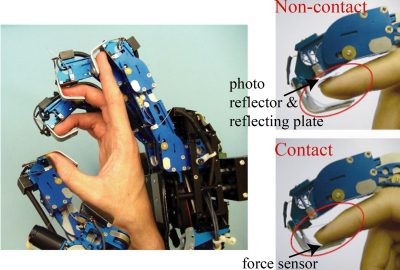
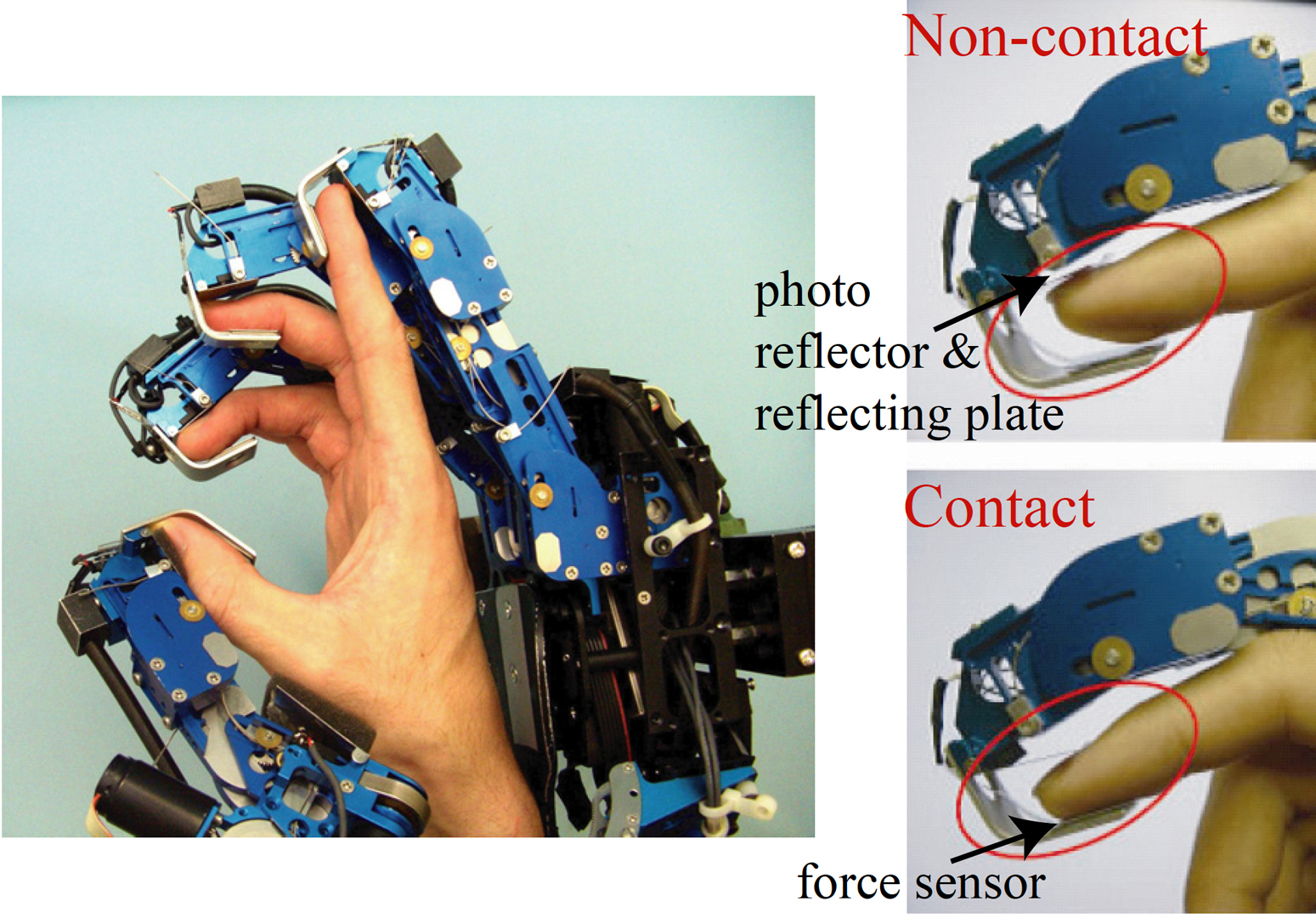
“Haptic Telexistence” provides highly realistic haptic interaction among humans and objects located in remote places. We have developed innovative devices and constructed a master-slave system to realize “Haptic Telexistence”. Human interaction will be dramatically improved by this concept that perceives us the properties of an object.
Other Information:
References
BENALI-KHOUDJA M., HAFEZ M., ALEXANDRE J.M., and KHEDDAR 2004. Tactile Interfaces: A State of the Art Survey, In Proceedings of International Symposium on Robotics, March, Paris, 23–26.
BOUZIT, M., BURDEA, G., POPESCU, G., and ROIAN, R. 2002. The Rutgers Master Ⅱ – New Design Force-Feedback Glove, In Proceedings of. IEEE/AMSE Transactions on Mechtronics, 7, 2, 256–263.
BUTTERFASS, B., GREBENSTEIN, M., LIEU, H., and HIRZINGER, G. 2001. DLR-Hand Ⅱ: Next Generation of a Dextrous Robot Hand, In Proceedings of IEEE International Conference on Robotics and Automation, Seoul, May, 109–114.
HOSHINO, K. and KAWABUCHI, Y. 2005. Pinching at finger tips for humanoid robot hand, Journal of Robotics and Mechatronics, 17, 6, 655–663.
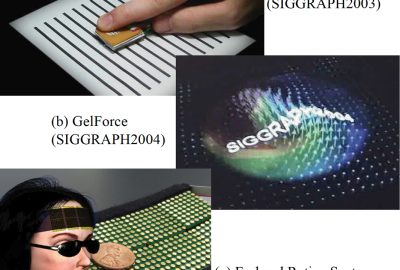
KAJIMOTO, H., INAMI, M., KAWAKAMI, N., and TACHI, S. 2003. SmartTouch: A New Skin Layer to Touch the Non-Touchable, In Proceedings of ACM SIGGRAPH 2003, San Diego.
KAJIMOTO, H., KAWAKAMI, N., MAEDA T., and TACHI, S. 2004. Electro-Tactile Display with Tactile Primary Color Approach, In Proceedings of International Conference. on Intelligent Robots and Systems(IROS).
KAJIMOTO, H., KANNO, Y., and TACHI, S. 2003. Forehead Retin System, In Proceedings of ACM SIGGRAPH 2003, Boston.
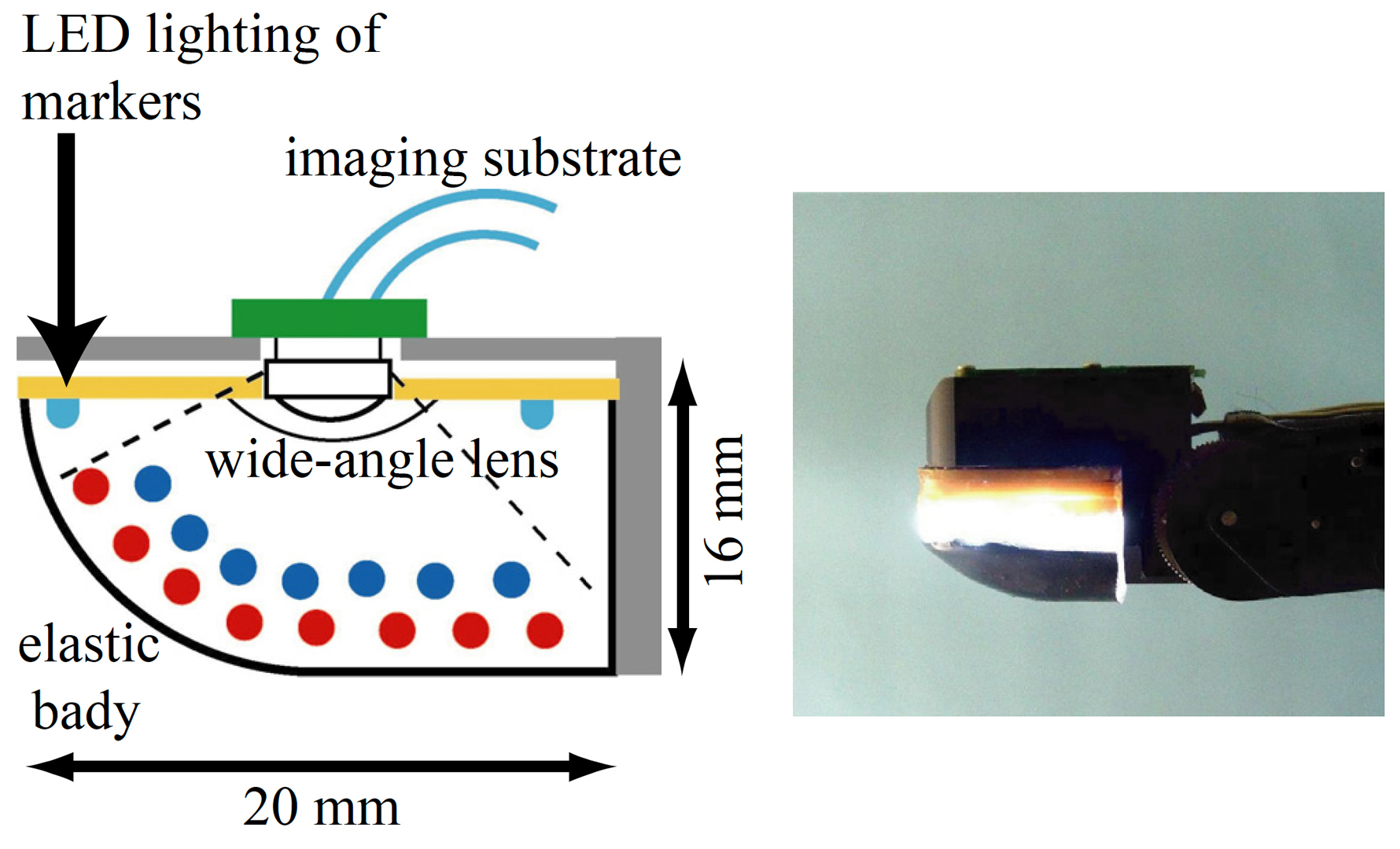
KAMIYAMA, K., KAJIMOTO, H., KAWAKAMI, N., and TACHI, S. 2004. Evaluation of a Vision-based Tactile Sensor, In Proceedings of International. Conference on Robotics and Automation (ICRA2004).
KAMIYAMA, K., MIZOTA, T., VLACK, K. KAJIMOTO, H., KAWAKAMI N., and TACHI, S. 2004. GelForce – A Vision Based Tactile Sensor, In Proceedings of ACM SIGGRAPH 2004, Los Angeles.
KWON, D-S., WOO, K. Y., and CHO, H. S. 1999. Haptic control of the Master Hand Controller for a Microsurgicaltelerobot. In Proceedings of IEEE Robotics and Automation, 3, 1722–1727.
LEE, M. H. and NICHOLLS, H.R 1999. Tactile Sensing for Mechatronics: A State of the Art Survey, Mechatronics, 9, 1–31.
METHIL, N.S., SHEN, Y., ZHU, D., POMEROY, C.A., MUKHERJEE, R., Xi, N. and MUTKA, M. 2006. Development of supermedia Interface for Telediagnostics of Breast Pathology, In Proceedings of IEEE International Conference on Robotics and Automation, Orlando, Florida.
MINSKY, M. 1980. Telepresence, Omni. June. 45–52. NAKAGAWARA, S., KAJIMOTO, H., KAWAKAMI, N., and TACHI, S., Kawabuchi, Y. 2005. An Encounter-Type Multi-Fingered Master Hand Using Circuitous Joints, In Proceedings of IEEE International Conference on Robotics and Automation (ICRA2005), Barcelona, Spain.
TACHI, S., and ABE, M. 1982. Study on Tele-Existence (1): Design of Visual Display. In Proceedings of the 21st Annual Conference of the Society of Instrument and Control Engineers (SIEC), Tokyo, Japan, July, 167–168.
Additional Images:
-
- 2007 ETech Sato: Haptic Telexistence
-
- 2007 ETech Sato: Haptic Telexistence

-
- 2007 ETech Sato: Haptic Telexistence
-
- 2007 ETech Sato: Haptic Telexistence
-
- 2007 ETech Sato: Haptic Telexistence
Acknowledgements:
This work was supported by associate professor Kajimoto (The Univ. of Electro-Communications) who developed the electrotactile display, Dr. Kamiyama and Nitta corp. who developed GelForce, and Dr. Kawabuchi (the Kawabuchi Mechanical Engineering Laboratory, Inc.) who developed the mechanism of both the slave and master hands.