
“FinGAR: Combination of Electrical and Mechanical Stimulation for High-Fidelity Tactile Presentation” by Yem, Okazaki and Kajimoto

Conference:
Experience Type(s):
Title:
- FinGAR: Combination of Electrical and Mechanical Stimulation for High-Fidelity Tactile Presentation
Entry Number: 07
Organizer(s)/Presenter(s):
Description:
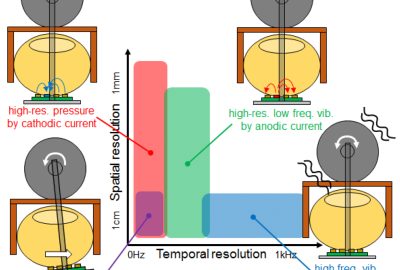
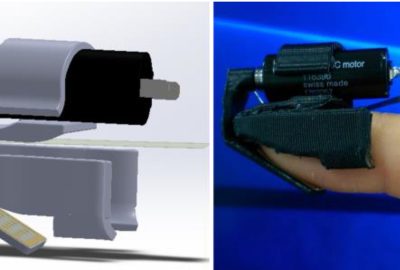
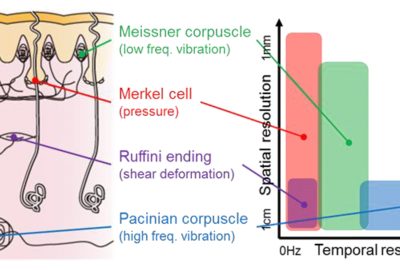
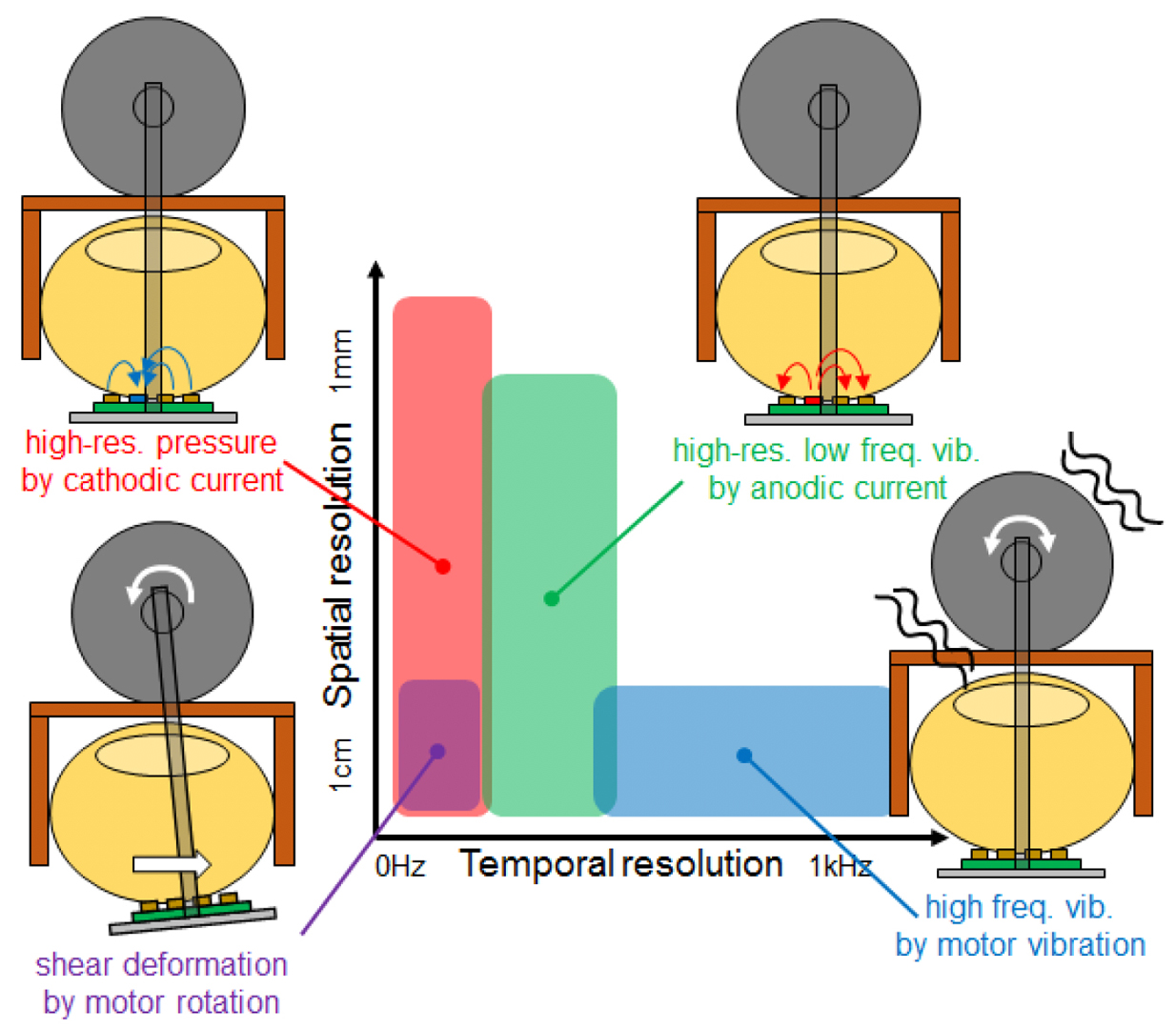
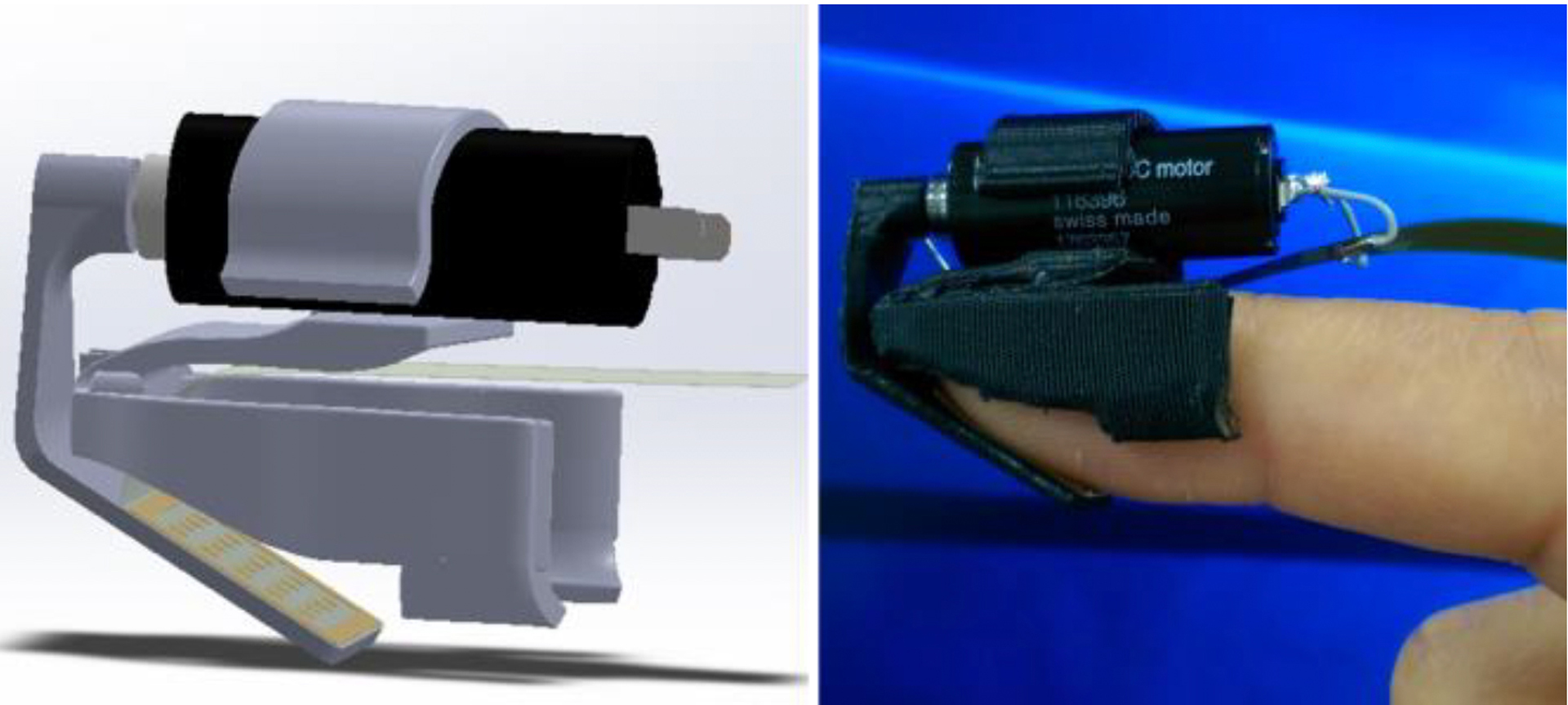
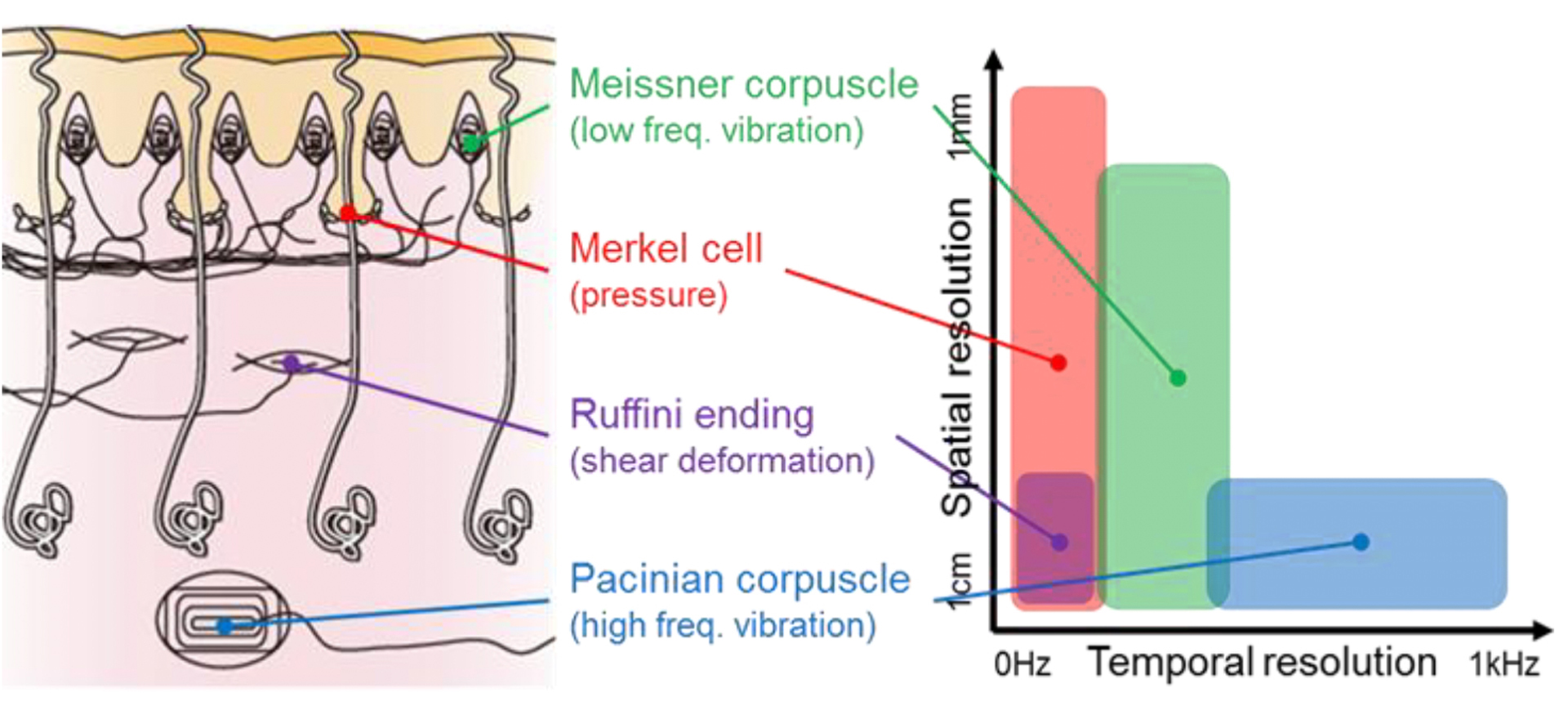
It is known that our touch sensation is a result of activities of four types of mechanoreceptors, each of which responds to different types of skin deformation; pressure, low frequency vibration, high frequency vibration, and shear stretch. If we could selectively activate these receptors, we could combine and present any types of tactile sensation. This approach has been studied but not fully achieved. In our study, we developed FinGAR (Finger Glove for Augmented Reality), in which we combined electrical and mechanical stimulation to selectively stimulate these four channels and thus to achieve high-fidelity tactile sensation. The electrical stimulation with array of electrodes presents pressure and low frequency vibration with high spatial resolution, while the mechanical stimulation with DC motor presents high frequency vibration and shear deformation of the whole finger. Furthermore, FinGAR is lightweight, simple in mechanism, easy to wear, and does not disturb the natural movement of the finger, all of which are necessary for general-purpose virtual reality system.
References:
ASAMURA, N., TOMORI, N., AND SHINODA, H. 1998. A Tactile Feeling Display Based on Selective Stimulation to Skin Receptors. Proc. the IEEE Virtual Reality Annual International Symposium, 36–42.
JONES, L. A., AND LEDERMAN, S. J. 2006. Human Hand Function, 1st ed. USA: Oxford University Press
KAJIMOTO, H., KAWAKAMI, N., MAEDA, T., AND TACHI, SU. 1999. Tactile Feeling Display using Functional Electrical Stimulation. Proc. ICAT’99.
MINAMIZAWA, K., FUKAMACHI, S., KAJIMOTO, ET AL. 2007. Gravity Grabber: Wearable Haptic Display to Present Virtual Mass Sensation. Proc. SIGGRAPH 2007 Emerging Technologies.
YEM, V., OKAZAKI, R., AND KAJIMOTO, H. 2016. Vibrotactile and Pseudo Force Presentation using Motor Rotational Acceleration. Proc. the IEEE Haptics Symposium, 47-51.
Keyword(s):
- FinGAR
- electro-tactile
- mechanical tactile
- mechanoreceptors
-

- 2016 ETech Yem: FinGAR: Combination of Electrical and Mechanical Stimulation for High-Fidelity Tactile Presentation
-
- 2016 ETech Yem: FinGAR: Combination of Electrical and Mechanical Stimulation for High-Fidelity Tactile Presentation
-
- 2016 ETech Yem: FinGAR: Combination of Electrical and Mechanical Stimulation for High-Fidelity Tactile Presentation
-
- 2016 ETech Yem: FinGAR: Combination of Electrical and Mechanical Stimulation for High-Fidelity Tactile Presentation
Additional Images:

Acknowledgements:
This research is supported by the JST-ACCEL Embodied Media Project.