
“Desktop Force Display” by Iwata
Conference:
Experience Type(s):
Title:
- Desktop Force Display
Program Title:
- The Edge
Entry Number: 26
Organizer(s)/Presenter(s):
Collaborator(s):
Project Affiliation:
- University of Tsukuba
Description:
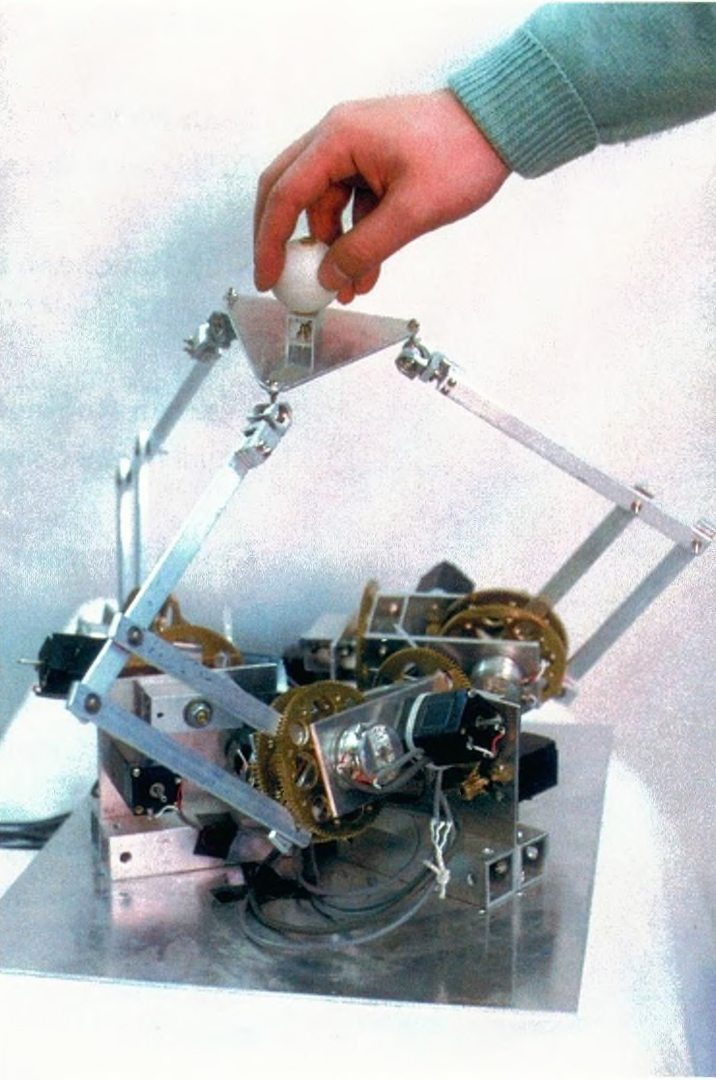
Force sensation plays important roles in the recognition of virtual objects. In this display, users can feel the rigidity or weight of virtual objects with a compact force feedback device (force display) for desktop use.
A six-degree-of-freedom manipulator employs a parallel mechanism to apply reaction forces to the fingers of the operator. The manipulator’s handle is supported by three sets of pantographs. With this compact hardware, the operator can feel the physical characteristics of three types of virtual objects:
1. Hard surface
Reaction force from the virtual surface is applied to the user’s hand. The user cannot penetrate the surface. This demonstration shows large payloads of the force display.
2. Elastic surface
The user can push and deform the surface. Reaction force increases in proportion to the deformation. This demonstration can be applied to 3D shape modeling.
3. Flow
Fluid velocity is represented by force, and vorticity is represented by torque. When the user places a hand in the fluid, resistance from the flow can be felt. If the user’s hand comes to vortex, it is twisted. This demonstration can be applied to scientific visualization.
These three objects are located in the working space of the force display. No visual image is presented to the user. The user gropes around in the virtual space for two or three minutes per demonstration. The system does not require instruction or calibration for individual differences, so 20 to 30 people can experience the demonstration each hour.
Most robotic manipulators have large-scale and high-cost hardware, which inhibits their application to human-computer interaction. This innovative forcefeedback device was specifically developed for desktop use. It provides haptic and force feedback, which strongly enhances human capabilities in the major application areas of virtual reality, such as scientific visualization and 3D shape modeling.
The basis of the force display is a six-degree-of-freedom manipulator that employs a parallel mechanism. The typical design feature of parallel manipulators is an octahedron called a “Stewart platform,” in which a top triangular platform and a base triangular platform are connected by six length-controllable cylinders. This hardware design is compact, and it has the ability to carry a relatively large payload, but the structure has some practical disadvantages in its small working volume and the mechanism’s lack of back-drivability (reduction of friction).
The Desktop Force Display system employs three sets of parallelogram linkages (pantographs) instead of linear actuators. Each pantograph is driven by two DC motors, and each motor is powered by a PWM (Pulse Width Modulation) amplifier. The top end of the pantograph is connected to a vertex of the top platform by a spherical joint. This pantograph mechanism has the same advantages as an octahedron mechanism, and it improves the working volume and back-drivability of the parallel manipulator. The inertia of the manipulators’s moving parts is so small that compensation is not needed.
The same team displayed a desktop force system with the same mechanical characteristics in the SIGGRAPH ’90 Proceedings. In the current work, new pantographs and spherical joints that improve the working space and working angle of the top platform were designed. The working space of the center of the top platform is a spherical volume whose diameter is approximately 40 cm. Each joint angle of the manipulator is measured by potentiometers. The maximum payload of the manipulator is 2.5 kilograms, which is more than a typical hand.