
“Virtual stroboscope for robot motion design” by Ishikawa and Hasegawa
Conference:
Type(s):
Title:
- Virtual stroboscope for robot motion design
Presenter(s)/Author(s):
Abstract:
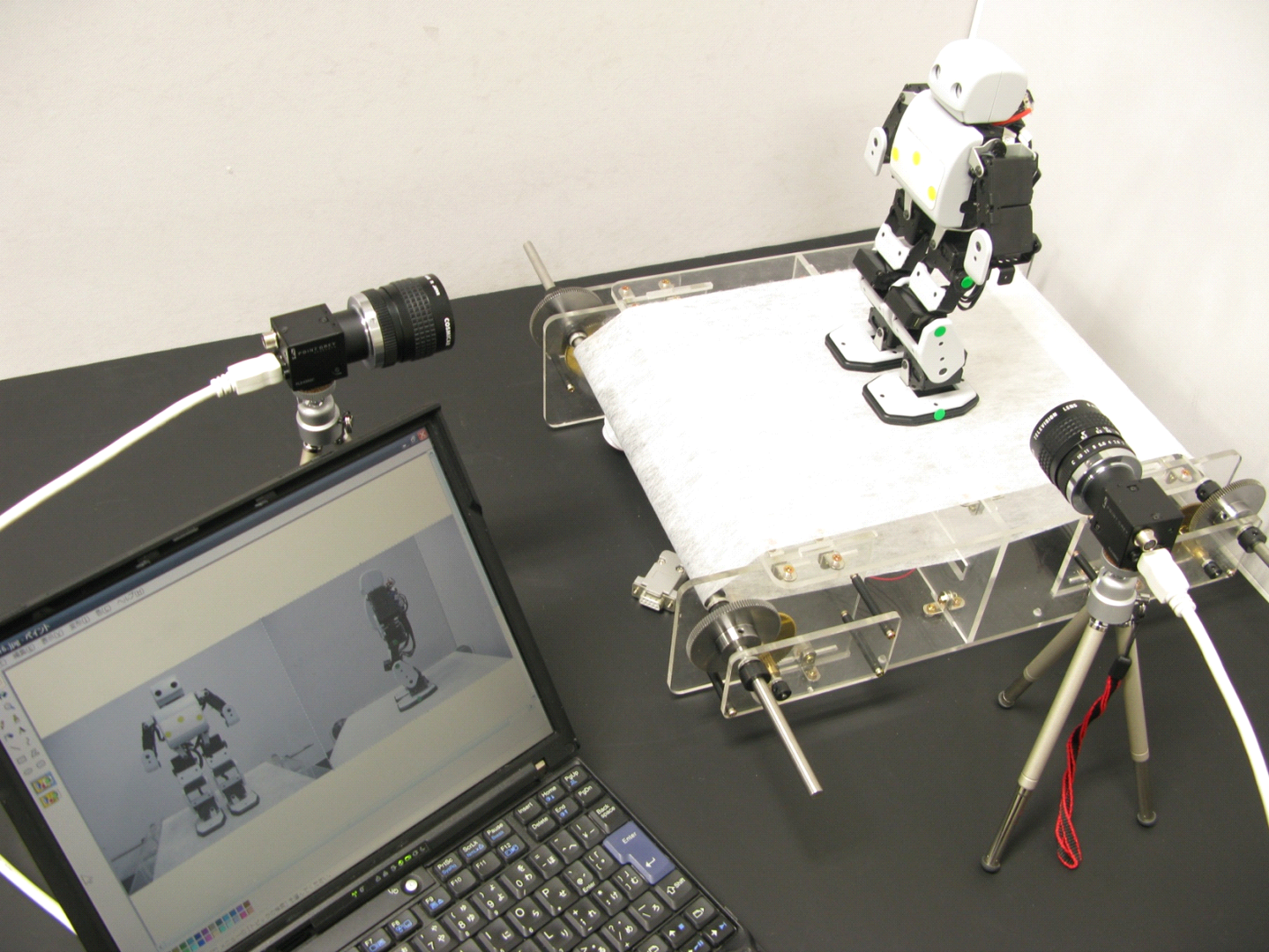
Recently, hobby robots such as pet robots and humanoid robots for entertainment are spreading and becoming more and more familiar each day. Compared to robots such as HONDA’s ASIMO, a hobby robot is much cheaper, less rigid and has far less precision in measuring and controlling the angle of its own joints. For this reason, although we can assign joint angle to a key frame, assigned posture cannot be taken like computer graphics. Therefore, to ensure the robot moves as desired, we need to actually look at the robot operating while adjusting key frames respectively. By this, the margin of error in the joint angle and distortion in mechanism can be avoided. For CG animation, the animator observes the animation in real-time and when a problem is encountered, the problem in the key frame is corrected by slowing the animation down or by examining each frame. However, with robots, sudden stopping of ambulatory action makes the robot fall down. Moreover, the error in joint angle and distortion in mechanism are different between operation and geostationary state because of dynamic influences.