
“Soft body locomotion” by Tan, Turk and Liu
Conference:
Type(s):
Title:
- Soft body locomotion
Presenter(s)/Author(s):
Abstract:
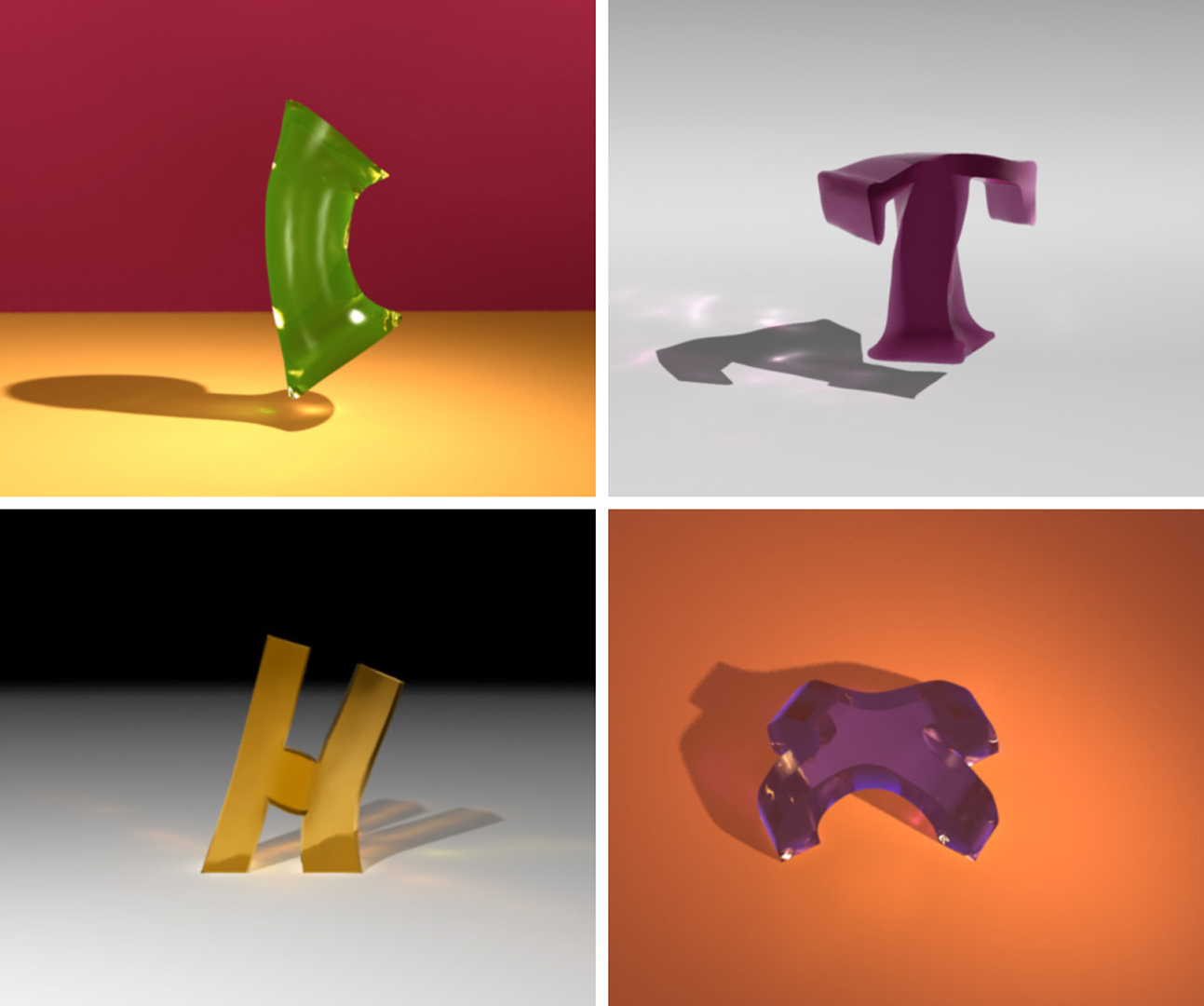
We present a physically-based system to simulate and control the locomotion of soft body characters without skeletons. We use the finite element method to simulate the deformation of the soft body, and we instrument a character with muscle fibers to allow it to actively control its shape. To perform locomotion, we use a variety of intuitive controls such as moving a point on the character, specifying the center of mass or the angular momentum, and maintaining balance. These controllers yield an objective function that is passed to our optimization solver, which handles convex quadratic program with linear complementarity constraints. This solver determines the new muscle fiber lengths, and moreover it determines whether each point of contact should remain static, slide, or lift away from the floor. Our system can automatically find an appropriate combination of muscle contractions that enables a soft character to fulfill various locomotion tasks, including walking, jumping, crawling, rolling and balancing.
References:
1. Abe, Y., da Silva, M., and Popović, J. 2007. Multiobjective control with frictional contacts. In Proceedings of the 2007 ACM SIGGRAPH/Eurographics symposium on Computer animation, SCA ’07, 249–258. Google ScholarDigital Library
2. Allard, J., Faure, F., Courtecuisse, H., Falipou, F., Duriez, C., and Kry, P. G. 2010. Volume contact constraints at arbitrary resolution. ACM Trans. Graph. 29 (July), 82:1–82:10. Google ScholarDigital Library
3. Anitescu, M., and Potra, F. A. 1997. Formulating dynamic multi-rigid-body contact problems with friction as solvable linear complementarity problems. Nonlinear Dynamics 14, 231–247.Google ScholarCross Ref
4. Bai, L., Mitchell, J. E., and Pang, J.-S. 2011. On convex quadratic programs with linear complementarity constraints. In submission.Google Scholar
5. Baraff, D., and Witkin, A. 1998. Large steps in cloth simulation. In Proceedings of the 25th annual conference on Computer graphics and interactive techniques, SIGGRAPH ’98, 43–54. Google ScholarDigital Library
6. Barbič, J., and James, D. L. 2005. Real-time subspace integration for St. Venant-Kirchhoff deformable models. ACM Transactions on Graphics (SIGGRAPH 2005) 24, 3 (Aug.), 982–990. Google ScholarDigital Library
7. Barbič, J., and Popović, J. 2008. Real-time control of physically based simulations using gentle forces. ACM Trans. on Graphics (SIGGRAPH Asia 2008) 27, 5, 163:1–163:10. Google ScholarDigital Library
8. Barbič, J., da Silva, M., and Popović, J. 2009. Deformable object animation using reduced optimal control. ACM Trans. on Graphics (SIGGRAPH 2009) 28, 3. Google ScholarDigital Library
9. Bargteil, A. W., Wojtan, C., Hodgins, J. K., and Turk, G. 2007. A finite element method for animating large viscoplastic flow. ACM Trans. Graph. 26 (July). Google ScholarDigital Library
10. Bathe, K.-J. 2007. Finite Element Procedures. Prentice-Hall, London.Google Scholar
11. Bergou, M., Mathur, S., Wardetzky, M., and Grinspun, E. 2007. TRACKS: Toward Directable Thin Shells. ACM Transactions on Graphics (SIGGRAPH) 26, 3 (jul), 50:1–50:10. Google ScholarDigital Library
12. Braun, S., and Mitchell, J. E. 2005. A semidefinite programming heuristic for quadratic programming problems with complementarity constraints. Computational Optimization and Application 31, 5–29. Google ScholarDigital Library
13. Bridson, R., Fedkiw, R., and Anderson, J. 2002. Robust treatment of collisions, contact and friction for cloth animation. In Proceedings of the 29th annual conference on Computer graphics and interactive techniques, SIGGRAPH ’02, 594–603. Google ScholarDigital Library
14. DiLorenzo, P. C., Zordan, V. B., and Sanders, B. L. 2008. Laughing out loud: control for modeling anatomically inspired laughter using audio. In ACM SIGGRAPH Asia 2008 papers, SIGGRAPH Asia ’08, 125:1–125:8. Google ScholarDigital Library
15. Erleben, K. 2007. Velocity-based shock propagation for multibody dynamics animation. ACM Trans. Graph. 26 (June). Google ScholarDigital Library
16. Grzeszczuk, R., and Terzopoulos, D. 1995. Automated learning of muscle-actuated locomotion through control abstraction. In Proceedings of the 22nd annual conference on Computer graphics and interactive techniques, 63–70. Google ScholarDigital Library
17. Hu, J., Mitchell, J. E., Pang, J.-S., Bennett, K. P., and Kunapuli, G. 2008. On the global solution of linear programs with linear complementarity constraints. SIAM Journal on Optimization 19, 445–471. Google ScholarDigital Library
18. Irving, G., Teran, J., and Fedkiw, R. 2004. Invertible finite elements for robust simulation of large deformation. In Proceedings of the 2004 ACM SIGGRAPH/Eurographics symposium on Computer animation, SCA ’04, 131–140. Google ScholarDigital Library
19. Irving, G., Schroeder, C., and Fedkiw, R. 2007. Volume conserving finite element simulations of deformable models. ACM Trans. Graph. 26 (July). Google ScholarDigital Library
20. Jain, S., Ye, Y., and Liu, C. K. 2009. Optimization-based interactive motion synthesis. ACM Transaction on Graphics 28, 1, 1–10. Google ScholarDigital Library
21. James, D. L., and Pai, D. K. 2003. Multiresolution Green’s function methods for interactive simulation of large-scale elastostatic objects. ACM Trans. Graph. 22 (January), 47–82. Google ScholarDigital Library
22. Kaufman, D. M., Sueda, S., James, D. L., and Pai, D. K. 2008. Staggered projections for frictional contact in multibody systems. ACM Trans. Graph. 27 (December), 164:1–164:11. Google ScholarDigital Library
23. Kier, W. M. 1985. Tongues, tentacles and trunks: The biomechanics of movement in muscular-hydrostats. Zoological Journal of the Linnean Society 83, 307–324.Google ScholarCross Ref
24. Kim, T., and James, D. L. 2009. Skipping steps in deformable simulation with online model reduction. ACM Trans. Graph. 28 (December), 123:1–123:9. Google ScholarDigital Library
25. Kim, J., and Pollard, N. S. 2011. Direct control of simulated non-human characters. IEEE Computer Graphics and Applications 31, 4 (July), 56–65. Google ScholarDigital Library
26. Kim, J., and Pollard, N. S. 2011. Fast simulation of skeleton-driven deformable body characters. ACM Transactions on Graphics 30, 5 (October). Google ScholarDigital Library
27. Kondo, R., Kanai, T., and Anjyo, K.-i. 2005. Directable animation of elastic objects. In Proceedings of the 2005 ACM SIGGRAPH/Eurographics symposium on Computer animation, SCA ’05, 127–134. Google ScholarDigital Library
28. Lee, S.-H., and Terzopoulos, D. 2006. Heads Up! Biomechanical Modeling and Neuromuscular Control of the Neck. ACM Transactions on Graphics 25, 3 (July), 1188–1198. Google ScholarDigital Library
29. Lee, S.-H., Sifakis, E., and Terzopoulos, D. 2009. Comprehensive biomechanical modeling and simulation of the upper body. ACM Trans. Graph. 28 (September), 99:1–99:17. Google ScholarDigital Library
30. Macchietto, A., Zordan, V., and Shelton, C. R. 2009. Momentum control for balance. ACM Trans. Graph. 28 (July), 80:1–80:8. Google ScholarDigital Library
31. Martin, S., Thomaszewski, B., Grinspun, E., and Gross, M. 2011. Example-based elastic materials. ACM Trans. Graph. 30 (Aug.), 72:1–72:8. Google ScholarDigital Library
32. Miller, G. S. P. 1988. The motion dynamics of snakes and worms. SIGGRAPH Comput. Graph. 22 (June), 169–173. Google ScholarDigital Library
33. Müller, M., Dorsey, J., McMillan, L., Jagnow, R., and Cutler, B. 2002. Stable real-time deformations. In Proceedings of the 2002 ACM SIGGRAPH/Eurographics symposium on Computer animation, SCA ’02, 49–54. Google ScholarDigital Library
34. Nesme, M., Payan, Y., and Faure, F. 2005. Efficient, physically plausible finite elements. In Eurographics 2005, Short papers, August, 2005, J. Dingliana and F. Ganovelli, Eds.Google Scholar
35. O’Brien, J. F., and Hodgins, J. K. 1999. Graphical modeling and animation of brittle fracture. In Proceedings of the 26th annual conference on Computer graphics and interactive techniques, SIGGRAPH ’99, 137–146. Google ScholarDigital Library
36. Otaduy, M. A., Tamstorf, R., Steinemann, D., and Gross, M. 2009. Implicit contact handling for deformable objects. Computer Graphics Forum (Proc. of Eurographics) 28, 2 (apr).Google ScholarCross Ref
37. Si, H., 2006. Tetgen: A quality tetrahedral mesh generator and a 3D Delaunay triangulator, January.Google Scholar
38. Sifakis, E., Neverov, I., and Fedkiw, R. 2005. Automatic determination of facial muscle activations from sparse motion capture marker data. ACM Trans. Graph. 24 (July), 417–425. Google ScholarDigital Library
39. Stewart, D., and Trinkle, J. C. 1996. An implicit time-stepping scheme for rigid body dynamics with Coulomb friction. International Journal of Nnumerical Methods in Engineering 39, 2673–2691.Google ScholarCross Ref
40. Sueda, S., Kaufman, A., and Pai, D. K. 2008. Musculotendon simulation for hand animation. ACM Trans. Graph. 27 (August), 83:1–83:8. Google ScholarDigital Library
41. Teran, J., Blemker, S., Hing, V. N. T., and Fedkiw, R. 2003. Finite volume methods for the simulation of skeletal muscle. In Proceedings of the 2003 ACM SIGGRAPH/Eurographics symposium on Computer animation, SCA ’03, 68–74. Google ScholarDigital Library
42. Teran, J., Sifakis, E., Blemker, S. S., Ng-Thow-Hing, V., Lau, C., and Fedkiw, R. 2005. Creating and simulating skeletal muscle from the visible human data set. IEEE Transactions on Visualization and Computer Graphics 11 (May), 317–328. Google ScholarDigital Library
43. Terzopoulos, D., Platt, J., Barr, A., and Fleischer, K. 1987. Elastically deformable models. In Proceedings of the 14th annual conference on Computer graphics and interactive techniques, SIGGRAPH ’87, 205–214. Google ScholarDigital Library
44. Tsang, W., Singh, K., and Fiume, E. 2005. Helping hand: an anatomically accurate inverse dynamics solution for unconstrained hand motion. In Proceedings of the 2005 ACM SIGGRAPH/Eurographics symposium on Computer animation, SCA ’05, 319–328. Google ScholarDigital Library
45. Tu, X., and Terzopoulos, D. 1994. Artificial fishes: Physics, locomotion, perception, behavior. In Proceedings of the 21st annual conference on Computer graphics and interactive techniques, ACM, 43–50. Google ScholarDigital Library
46. Zordan, V. B., Celly, B., Chiu, B., and DiLorenzo, P. C. 2006. Breathe easy: model and control of human respiration for computer animation. Graph. Models 68 (March), 113–132. Google ScholarDigital Library