
“Planning motions with intentions” by Koga, Kondo, Kuffner and Latombe
Conference:
Type(s):
Title:
- Planning motions with intentions
Presenter(s)/Author(s):
Abstract:
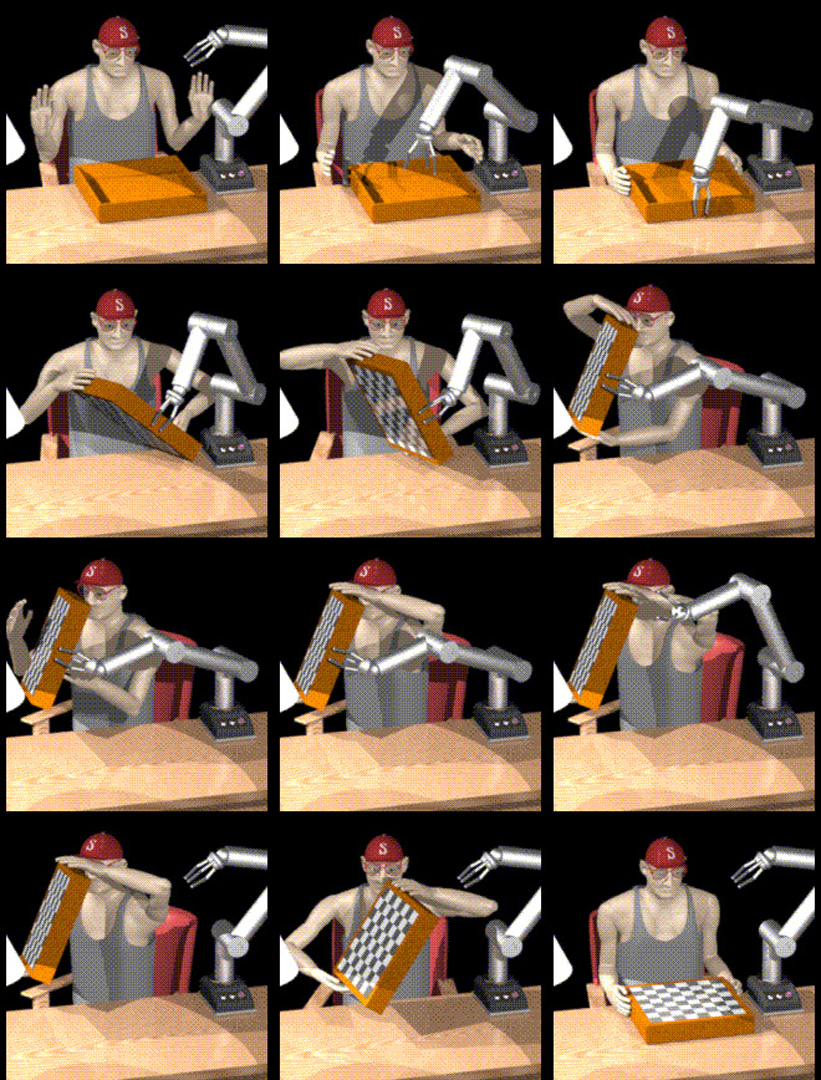
We apply manipulation planning to computer animation. A new path planner is presented that automatically computes the collision-free trajectories for several cooperating arms to manipulate a movable object between two configurations. This implemented planner is capable of dealing with complicated tasks where regrasping is involved. In addition, we present a new inverse kinematics algorithm for the human arms. This algorithm is utilized by the planner for the generation of realistic human arm motions as they manipulate objects. We view our system as a tool for facilitating the production of animation.
References:
1. Atkeson, Christopher and Hollerbach, John. Kine-matic Features of Unrestrained Arm Movements. MIT AI Memo 790, 1984.
2. Baraff, David. Analytical Method for Dynamic Simu-lation of Non-Penetrating Rigid Bodies. Proceedings of SIGGRAPH’89 (Boston, Massachusetts, July 31 -August 4, 1989). In Computer Graphics 23, 3 (July 1989), 223-232.
3. Barraquand, Jerome and Latombe, Jean-Claude. Robot Motion Planning: A Distributed Representa-tion Approach. Int. J. Robotics Research, 10(6), De-cember 1991, 628-649.
4. Bobrow, J.E., Dubowsky, S., Gibson, J.S. Time-Optimal Control of Robotic Manipulators Along Specified Paths. Int. J. Robotics Research, Vol. 4, No. 3, 1985, 3-17.
5. Bruderlin, Armin and Calvert, Thomas. Goal-directed, dynamic animation of human walking. Proceedings of SIGGRAPH’89 (Boston, Massachusetts, July 31 -August 4, 1989). In Computer Graphics 23, 3 (July 1989), 233-242.
6. Ching, Wallace and Badler, Norman. Fast motion planning for anthropometric figures with many de-grees of freedom. Proc. 1992 IEEE Int. Conf. on Robotics and Automation, Nice, France, 1992, 2340- 2345.
7. Ferbach, Pierre and Barraquand, Jerome. A Penalty Function Method for Constrained Motion Planning. Rep. No. 34, Paris Research Lab., DEC, Sept. 1993.
8. Flash, T. and Hogan, N. The Coordination of Arm Movements: An Experimentally Confirmed Mathe-matical Model. MIT AI Memo 786, 1984.
9. Hahn, James K. Realistic Animation of Rigid Bod-ies. Proceedings of SIGGRAPH’88 (Atlanta, Geor-gia, August 1-5, 1988). In Computer Graphics 22, 4 (August 1988), 299-308.
10. Hollerbach, John and Atkeson, Christopher. Deducing Planning Variables from Experimental Arm Trajecto-ries: Pitfalls and Possibilities. Biological Cybernetics, 56(5), 1987, 279-292.
11. Koga, Y., Lastennet, T., Latombe, J.C., and Li, T.Y. Multi-Arm Manipulation Planning. Proc. 9th Int. Symp. Automation and Robotics in Construction, Tokyo, June 1992, 281-288.
12. Koga, Yoshihito. On Computing Multi-Arm Manipu-lation Trajectories. Ph.D. thesis, Stanford University (in preparation).
13. Kondo, Koichi. Inverse Kinematics of a Human Arm. Rep. STAN-CS-TR-94-1508, Department of Com-puter Science, Stanford University, CA, 1994.
14. Lacquaniti, F. and Soechting, J.F. Coordination of Arm and Wrist Motion During A Reaching Task. The Jour-nal of Neuroscience, Vol. 2, No. 2, 1982, 399-408.
15. Laumond, Jean-Paul and Alami, Rachid. A Geomet-rical Approach to Planning Manipulation Tasks: The Case of a Circular Robot and a Movable Circular Object Amidst Polygonal Obstacles. Rep. No. 88314, LAAS, Toulouse, 1989.
16. Latombe, Jean-Claude. Robot Motion Planning. Kluwer Academic Publishers, Boston, MA, 1991.
17. Lee, P., Wei, S., Zhao, J., and Badler, N.I. Strength guided motion. Proceedings of SIGGRAPH’90 (Dal-las, Texas, August 6-10, 1990). In Computer Graphics 24, 4 (August 1990), 253-262.
18. Lengyel, J., Reichert, M., Donald, B.R., and Green-berg, D.P. Real-Time Robot Motion Planning Using Rasterizing Computer Graphics Hardware. Proceed-ings of SIGGRAPH’90 (Dallas, Texas, August 6-10, 1990). In Computer Graphics 24, 4 (August 1990), 327-335.
19. Lozano-P~ erez, Tomas. Spatial Planning: A Configu-ration Space Approach. IEEE Tr. Computers, 32(2), 1983, pp. 108-120.
20. McCormick, E.J. and Sanders, M.S. Human Factors in Engineering and Design. McGraw-Hill Book Com-pany, New York, 1982.
21. McKenna, Michael and Zeltzer, David. Dynamic sim-ulation of autonomous legged locomotion. Proceed-ings of SIGGRAPH’90 (Dallas, Texas, August 6-10, 1990). In Computer Graphics 24, 4 (August 1990), 29-38.
22. Pertin-Troccaz, Jocelyn. Grasping: A State of the Art. In The Robotics Review 1, O. Khatib, J.J. Craig, and T. Lozano-P~ erez, eds., MIT Press, Cambridge, MA, 1989, 71-98.
23. Pieper, D. and Roth, B. The Kinematics of Manip-ulators Under Computer Control. Proceedings of the Second International Congress on Theory of Machines and Mechanisms, Vol. 2, Zakopane, Poland, 1969, 159-169.
24. Quinlan, Sean. Efficient Distance Computation Be-tween Non-Convex Objects. To appear in Proc. 1994 IEEE Int. Conf. on Robotics and Automation, San Diego, CA, 1994.
25. Raibert, Marc and Hodgins, Jessica. Animation of Dynamic Legged Locomotion. Proceedings of SIG-GRAPH’91 (Las Vegas, Nevada, July 28 – August 2, 1991). In Computer Graphics 25, 4 (July 1991), 349-358.
26. Smith, A.M. et al. Group Report: What Do Studies of Specific Motor Acts Such as Reaching and Grasping Tell Us about the General Principles of Goal-Directed Motor Behaviour? Motor Contro: Concepts and Is-sues, D.R Humphrey and H,J, Freund, eds., John Wi-ley and Sons, New York, 1991, 357-381.
27. Soechting, J.F. and Terzuolo, C.A. An Algorithm for the Generation of Curvilinear Wrist Motion in an Arbitrary Plane in Three Dimensional Space. Neu-roscience, Vol. 19, No. 4, 1986, 1393-1405.
28. Soechting, J.F. and Terzuolo, C.A. Organization of Arm Movements in Three Dimensional Space. Wrist Motion is Piecewise Planar. Neuroscience, Vol. 23, No. 1, 1987, 53-61.
29. Soechting, J.F. and Flanders, M. Sensorimotor Rep-resentations for Pointing to Targets in Three Dimen-sional Space. Journal of Neurophysiology, Vol. 62, No. 2, 1989, 582-594.
30. Soechting, J.F. and Flanders, M. Errors in Pointing are Due to Approximations in Sensorimotor Transfor-mations. Journal of Neurophysiology, Vol. 62, No. 2, 1989, 595-608.
31. Soechting, J.F. Elements of Coordinated Arm Move-ments in Three-Dimensional Space. Perspectives on the Coordination of Movement, edited by S.A. Wal-lace, Elsevier Science Publishers, Amsterdam, 1989, 47-83.
32. Tournassoud, P., Lozano-P~ erez, T., and Mazer, E. Re-grasping. Proc. IEEE Int. Conf. Robotics and Automa-tion, Raleigh, NC, 1987, 1924-1928.
33. Webber, B., Badler, N., Baldwin, F.B., Beckett, W., DiEugenio, B., Geib, C., Jung, M., Levinson, L., Moore, M., and White, M. Doing what you’re told: followingtask instructions in changing, but hospitable environments. SIGGRAPH ’93 Course note 80 “Re-cent Techniques in Human Modeling, Animation and Rendering”, 1993, 4.3-4.31.
34. Wilfong, G. Motion Planning in the Presence of Mov-able Obstacles. Proc. 4th ACM Symp. Computational Geometry, 1988, 279-288.