
“Physics-based full-body soccer motion control for dribbling and shooting” by Hong, Han, Cho, Shin and Noh
Conference:
Type(s):
Title:
- Physics-based full-body soccer motion control for dribbling and shooting
Session/Category Title:
- Learning to Move
Presenter(s)/Author(s):
Abstract:
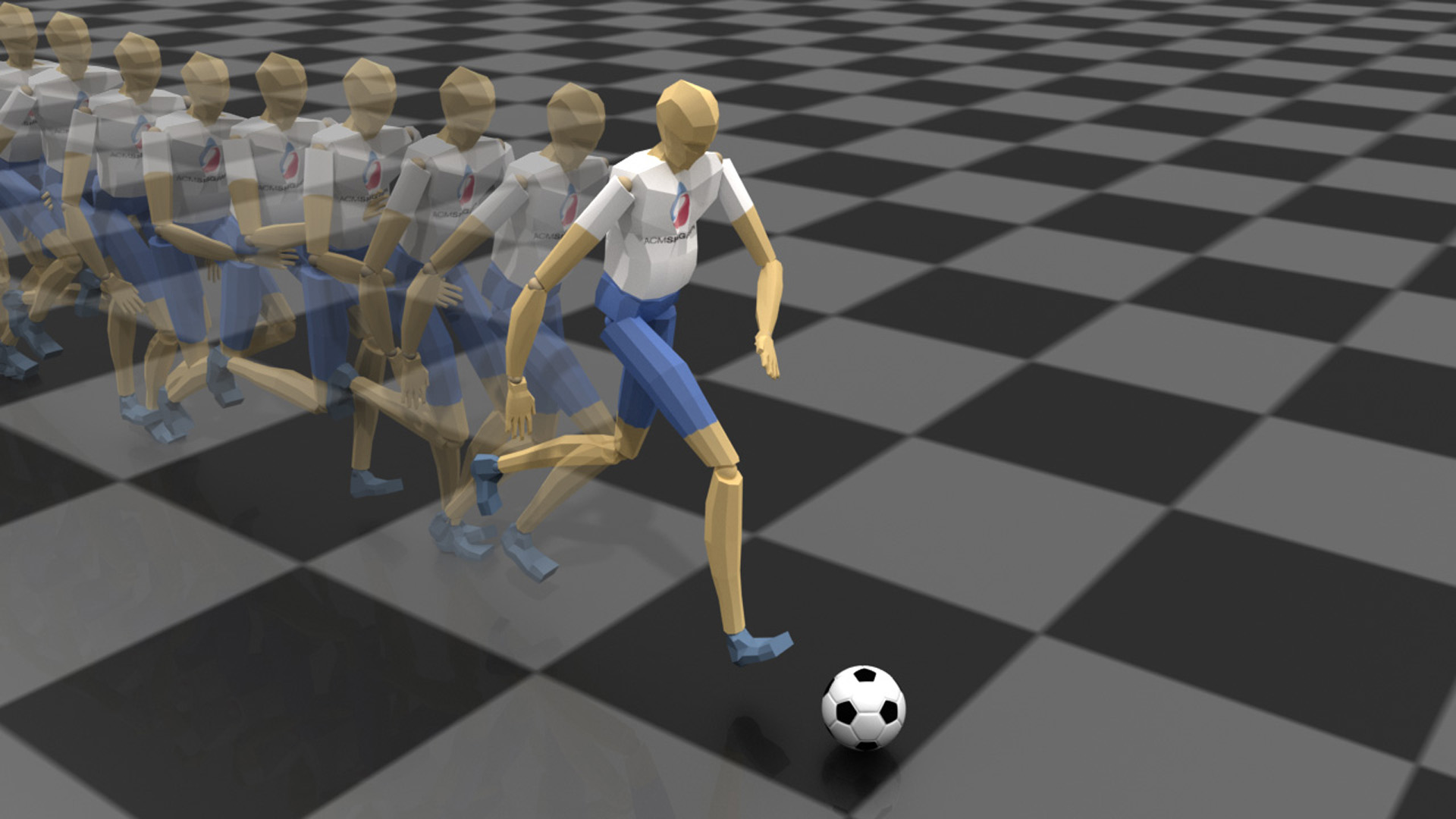
Playing with a soccer ball is not easy even for a real human because of dynamic foot contacts with the moving ball while chasing and controlling it. The problem of online full-body soccer motion synthesis is challenging and has not been fully solved yet. In this paper, we present a novel motion control system that produces physically-correct full-body soccer motions: dribbling forward, dribbling to the side, and shooting, in response to an online user motion prescription specified by a motion type, a running speed, and a turning angle. This system performs two tightly-coupled tasks: data-driven motion prediction and physics-based motion synthesis. Given example motion data, the former synthesizes a reference motion in accordance with an online user input and further refines the motion to make the character kick the ball at a right time and place. Provided with the reference motion, the latter then adopts a Model Predictive Control (MPC) framework to generate a physically-correct soccer motion, by solving an optimal control problem that is formulated based on dynamics for a full-body character and the moving ball together with their interactions. Our demonstration shows the effectiveness of the proposed system that synthesizes convincing full-body soccer motions in various scenarios such as adjusting the desired running speed of the character, changing the velocity and the mass of the ball, and maintaining balance against external forces.
References:
1. Mazen Al Borno, Martin De Lasa, and Aaron Hertzmann. 2013. Trajectory optimization for full-body movements with complex contacts. IEEE transactions on visualization and computer graphics 19, 8 (2013), 1405–1414. Google ScholarDigital Library
2. Okan Arikan and David A Forsyth. 2002. Interactive motion generation from examples. In ACM Transactions on Graphics (TOG), Vol. 21. ACM, 483–490. Google ScholarDigital Library
3. Samuel Barrett, Katie Genter, Todd Hester, Michael Quinlan, and Peter Stone. 2010. Controlled kicking under uncertainty. In The Fifth Workshop on Humanoid Soccer Robots at Humanoids.Google Scholar
4. Jong-In Choi, Shin-Jin Kang, Chang-Hun Kim, and Jung Lee. 2015. Virtual ball player. The Visual Computer 31, 6–8 (2015), 905–914. Google ScholarDigital Library
5. Jong-In Choi, Sun-Jeong Kim, Chang-Hun Kim, and Jung Lee. 2016. Let’s be a virtual juggler. Computer Animation and Virtual Worlds 27, 3–4 (2016), 443–450. Google ScholarDigital Library
6. Simon Clavet. 2016. Motion Matching and The Road to Next-Gen Animation. In Proc. of GDC 2016 (2016).Google Scholar
7. Marco Da Silva, Yeuhi Abe, and J Popović. 2008. Simulation of Human Motion Data using Short-Horizon Model-Predictive Control. In Computer Graphics Forum, Vol. 27. Wiley Online Library, 371–380.Google Scholar
8. Martin De Lasa, Igor Mordatch, and Aaron Hertzmann. 2010. Feature-based locomotion controllers. In ACM Transactions on Graphics (TOG), Vol. 29. ACM, 131. Google ScholarDigital Library
9. Kai Ding, Libin Liu, Michiel Van de Panne, and KangKang Yin. 2015. Learning reduced-order feedback policies for motion skills. In Proceedings of the 14th ACM SIGGRAPH/Eurographics Symposium on Computer Animation. ACM, 83–92. Google ScholarDigital Library
10. EASports. 1993–2019. FIFA series. www.easports.com/fifa.Google Scholar
11. Michael Gleicher. 2001. Motion path editing. In Proceedings of the 2001 symposium on Interactive 3D graphics. ACM, 195–202. Google ScholarDigital Library
12. Sehoon Ha and C Karen Liu. 2016. Evolutionary optimization for parameterized whole-body dynamic motor skills. In Robotics and Automation (ICRA), 2016 IEEE International Conference on. IEEE, 1390–1397.Google Scholar
13. Daseong Han, Haegwang Eom, Junyong Noh, et al. 2016. Data-guided Model Predictive Control Based on Smoothed Contact Dynamics. In Computer Graphics Forum, Vol. 35. Wiley Online Library, 533–543.Google ScholarCross Ref
14. Daseong Han, Junyong Noh, Xiaogang Jin, Joseph S Shin, and Sung Y Shin. 2014. Online real-time physics-based predictive motion control with balance recovery. In Computer Graphics Forum, Vol. 33. Wiley Online Library, 245–254. Google ScholarDigital Library
15. Nicolas Heess, Srinivasan Sriram, Jay Lemmon, Josh Merel, Greg Wayne, Yuval Tassa, Tom Erez, Ziyu Wang, Ali Eslami, Martin Riedmiller, et al. 2017. Emergence of locomotion behaviours in rich environments. arXiv preprint arXiv:1707.02286 (2017).Google Scholar
16. Todd Hester, Michael Quinlan, and Peter Stone. 2010. Generalized model learning for reinforcement learning on a humanoid robot. In Robotics and Automation (ICRA), 2010 IEEE International Conference on. IEEE, 2369–2374.Google ScholarCross Ref
17. Daniel Holden, Taku Komura, and Jun Saito. 2017. Phase-functioned neural networks for character control. ACM Transactions on Graphics (TOG) 36, 4 (2017), 42. Google ScholarDigital Library
18. Daniel Holden, Jun Saito, and Taku Komura. 2016. A deep learning framework for character motion synthesis and editing. ACM Transactions on Graphics (TOG) 35, 4 (2016), 138. Google ScholarDigital Library
19. David H Jacobson and David Q Mayne. 1970. Differential dynamic programming. (1970).Google Scholar
20. Sumit Jain and C Karen Liu. 2009. Interactive synthesis of human-object interaction. In Proceedings of the 2009 ACM SIGGRAPH/Eurographics Symposium on Computer Animation. ACM, 47–53. Google ScholarDigital Library
21. KONAMI. 1995–2019. Pro Evolution Soccer series. www.konami.com.Google Scholar
22. Lucas Kovar, Michael Gleicher, and Frédéric Pighin. 2002. Motion graphs. In ACM transactions on graphics (TOG), Vol. 21. ACM, 473–482. Google ScholarDigital Library
23. Jehee Lee, Jinxiang Chai, Paul SA Reitsma, Jessica K Hodgins, and Nancy S Pollard. 2002. Interactive control of avatars animated with human motion data. In ACM Transactions on Graphics (TOG), Vol. 21. ACM, 491–500. Google ScholarDigital Library
24. Yoonsang Lee, Sungeun Kim, and Jehee Lee. 2010a. Data-driven biped control. ACM Transactions on Graphics (TOG) 29, 4 (2010), 129. Google ScholarDigital Library
25. Yongjoon Lee, Kevin Wampler, Gilbert Bernstein, Jovan Popović, and Zoran Popović. 2010b. Motion fields for interactive character locomotion. In ACM Transactions on Graphics (TOG), Vol. 29. ACM, 138. Google ScholarDigital Library
26. Leonardo Leottau, Carlos Celemin, and Javier Ruiz-del Solar. 2014. Ball dribbling for humanoid biped robots: a reinforcement learning and fuzzy control approach. In Robot Soccer World Cup. Springer, 549–561.Google Scholar
27. Sergey Levine and Vladlen Koltun. 2013. Guided policy search. In International Conference on Machine Learning. 1–9. Google ScholarDigital Library
28. Sergey Levine, Jack M Wang, Alexis Haraux, Zoran Popović, and Vladlen Koltun. 2012. Continuous character control with low-dimensional embeddings. ACM Transactions on Graphics (TOG) 31, 4 (2012), 28. Google ScholarDigital Library
29. Libin Liu, Michiel Van De Panne, and KangKang Yin. 2016. Guided learning of control graphs for physics-based characters. ACM Transactions on Graphics (TOG) 35, 3 (2016), 29. Google ScholarDigital Library
30. Libin Liu, KangKang Yin, Michiel van de Panne, and Baining Guo. 2012. Terrain runner: control, parameterization, composition, and planning for highly dynamic motions. ACM Trans. Graph. 31, 6 (2012), 154–1. Google ScholarDigital Library
31. Libin Liu, KangKang Yin, Michiel van de Panne, Tianjia Shao, and Weiwei Xu. 2010. Sampling-based contact-rich motion control. In ACM Transactions on Graphics (TOG), Vol. 29. ACM, 128. Google ScholarDigital Library
32. Igor Mordatch, Martin De Lasa, and Aaron Hertzmann. 2010. Robust physics-based locomotion using low-dimensional planning. In ACM Transactions on Graphics (TOG), Vol. 29. ACM, 71. Google ScholarDigital Library
33. Uldarico Muico, Jovan Popović, and Zoran Popović. 2011. Composite control of physically simulated characters. ACM Transactions on Graphics (TOG) 30, 3 (2011), 16. Google ScholarDigital Library
34. Sang Il Park, Hyun Joon Shin, and Sung Yong Shin. 2002. On-line locomotion generation based on motion blending. In Proceedings of the 2002 ACM SIGGRAPH/Eurographics symposium on Computer animation. ACM, 105–111. Google ScholarDigital Library
35. Xue Bin Peng, Pieter Abbeel, Sergey Levine, and Michiel van de Panne. 2018. DeepMimic: Example-guided Deep Reinforcement Learning of Physics-based Character Skills. ACM Trans. Graph. 37, 4, Article 143 (July 2018), 14 pages. Google ScholarDigital Library
36. Xue Bin Peng, Glen Berseth, KangKang Yin, and Michiel Van De Panne. 2017. Deeploco: Dynamic locomotion skills using hierarchical deep reinforcement learning. ACM Transactions on Graphics (TOG) 36, 4 (2017), 41. Google ScholarDigital Library
37. ChangHyun Sung, Takahiro Kagawa, and Yoji Uno. 2013. Whole-body motion planning for humanoid robots by specifying via-points. International Journal of Advanced Robotic Systems 10, 7 (2013), 300.Google ScholarCross Ref
38. Yuval Tassa, Tom Erez, and Emanuel Todorov. 2012. Synthesis and stabilization of complex behaviors through online trajectory optimization. In Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on. IEEE, 4906–4913.Google ScholarCross Ref
39. Yuval Tassa, Nicolas Mansard, and Emo Todorov. 2014. Control-limited differential dynamic programming. In 2014 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 1168–1175.Google ScholarCross Ref
40. Emanuel Todorov. 2014. Convex and analytically-invertible dynamics with contacts and constraints: Theory and implementation in MuJoCo. In Robotics and Automation (ICRA), 2014 IEEE International Conference on. IEEE, 6054–6061.Google ScholarCross Ref
41. Adrien Treuille, Yongjoon Lee, and Zoran Popović. 2007. Near-optimal character animation with continuous control. In ACM Transactions on Graphics (tog), Vol. 26. ACM, 7. Google ScholarDigital Library
42. Seung-Joon Yi, Stephen McGill, and Daniel D Lee. 2013. Improved online kick generation method for humanoid soccer robots. In The 8th Workshop on Humanoid Soccer Robots, Georgia USA. Disponible en http://www.ais.uni-bonn.de/humanoidsoccer/ws13/papers/HSR13_Yi.pdf.Google Scholar
43. Wenhao Yu, Greg Turk, and C Karen Liu. 2018. Learning Symmetry and Low-energy Locomotion. arXiv preprint arXiv:1801.08093 (2018). Google ScholarDigital Library