
“Optimizing locomotion controllers using biologically-based actuators and objectives” by Wang, Hamner, Delp and Koltun
Conference:
Type(s):
Title:
- Optimizing locomotion controllers using biologically-based actuators and objectives
Presenter(s)/Author(s):
Abstract:
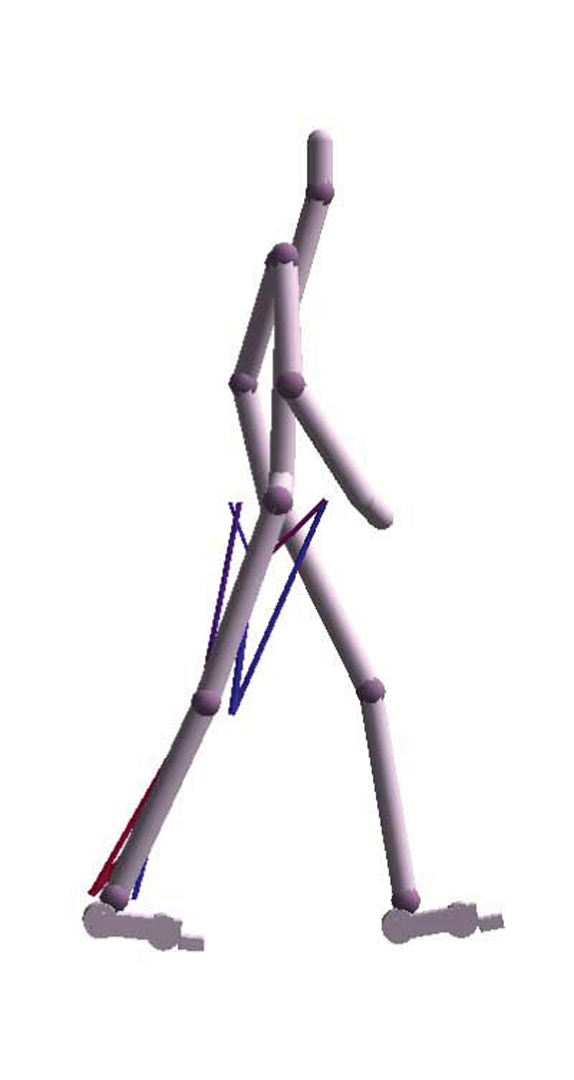
We present a technique for automatically synthesizing walking and running controllers for physically-simulated 3D humanoid characters. The sagittal hip, knee, and ankle degrees-of-freedom are actuated using a set of eight Hill-type musculotendon models in each leg, with biologically-motivated control laws. The parameters of these control laws are set by an optimization procedure that satisfies a number of locomotion task terms while minimizing a biological model of metabolic energy expenditure. We show that the use of biologically-based actuators and objectives measurably increases the realism of gaits generated by locomotion controllers that operate without the use of motion capture data, and that metabolic energy expenditure provides a simple and unifying measurement of effort that can be used for both walking and running control optimization.
References:
1. Ackermann, M., and van den Bogert, A. J. 2010. Optimality principles for model-based prediction of human gait. Journal of Biomechanics 43, 6, 1055–1060.Google ScholarCross Ref
2. Alexander, R. M. 2003. Principles of Animal Locomotion. Princeton University Press.Google Scholar
3. Anderson, F. C., and Pandy, M. G. 2001. Dynamic optimization of human walking. Journal of Biomechanical Engineering 123, 5, 381–390.Google ScholarCross Ref
4. Anderson, F. C. 1999. A dynamic optimization solution for a complete cycle of normal gait. PhD thesis, University of Texas at Austin.Google Scholar
5. Bhargava, L. J., Pandy, M. G., and Anderson, F. C. 2004. A phenomenological model for estimating metabolic energy consumption in muscle contraction. Journal of Biomechanics 37, 81–88.Google ScholarCross Ref
6. Blickhan, R. 1989. The spring-mass model for running and hopping. Journal of Biomechanics 22, 1217–1227.Google ScholarCross Ref
7. Collins, S., Ruina, A., Tedrake, R., and Wisse, M. 2005. Efficient bipedal robots based on passive-dynamic walkers. Science 307, 5712, 1082–1085.Google Scholar
8. Coros, S., Beaudoin, P., and van de Panne, M. 2009. Robust task-based control policies for physics-based characters. ACM Transactions on Graphics 28, 5. Google ScholarDigital Library
9. Coros, S., Beaudoin, P., and van de Panne, M. 2010. Generalized biped walking control. ACM Transactions on Graphics 29, 4. Google ScholarDigital Library
10. da Silva, M., Abe, Y., and Popovi?, J. 2008. Interactive simulation of stylized human locomotion. ACM Transactions on Graphics 27, 3. Google ScholarDigital Library
11. de Lasa, M., Mordatch, I., and Hertzmann, A. 2010. Feature-based locomotion controllers. ACM Transactions on Graphics 29, 4. Google ScholarDigital Library
12. Faloutsos, P., van de Panne, M., and Terzopoulos, D. 2001. Composable controllers for physics-based character animation. In Proc. SIGGRAPH, ACM. Google ScholarDigital Library
13. Full, R. J., and Koditschek, D. E. 1999. Templates and anchors: Neuromechanical hypotheses of legged locomotion on land. The Journal of Experimental Biology 202, 23, 3325–3332.Google Scholar
14. Geyer, H., and Herr, H. 2010. A muscle-reflex model that encodes principles of legged mechanics produces human walking dynamics and muscle activities. IEEE Transactions on Neural Systems and Rehabilitation Engineering 18, 3, 263–273.Google ScholarCross Ref
15. Geyer, H., Seyfarth, A., and Blickhan, R. 2003. Positive force feedback in bouncing gaits? Proceedings of the Royal Society B 270, 2173–2183.Google ScholarCross Ref
16. Hamner, S. R., Seth, A., and Delp, S. L. 2010. Muscle contributions to propulsion and support during running. Journal of Biomechanics 43, 2709–2716.Google ScholarCross Ref
17. Hansen, N. 2006. The CMA evolution strategy: A comparing review. In Towards a New Evolutionary Computation. Springer, 75–102.Google Scholar
18. Hase, K., Miyashita, K., Ok, S., and Arakawa, Y. 2003. Human gait simulation with a neuromusculoskeletal model and evolutionary computation. Journal of Visualization and Computer Animation 14, 2, 73–92.Google ScholarCross Ref
19. Hodgins, J. K., Wooten, W. L., Brogan, D. C., and O’Brien, J. F. 1995. Animating human athletics. In Proc. SIGGRAPH, ACM. Google ScholarDigital Library
20. Jain, S., and Liu, C. K. 2011. Controlling physics-based characters using soft contacts. ACM Transactions on Graphics 30, 6. Google ScholarDigital Library
21. Jain, S., Ye, Y., and Liu, C. K. 2009. Optimization-based interactive motion synthesis. ACM Transactions on Graphics 28, 1. Google ScholarDigital Library
22. Kay, R. M., Rethiefsen, S. A., Skaggs, D., and Leet, A. 2002. Outcome of medial versus combined medial and lateral hamstring lengthening surgery in cerebral palsy. Journal of Pediatric Orthopaedics 22, 2, 169–172.Google ScholarCross Ref
23. Kuo, A. D. 2001. A simple model of bipedal walking predicts the preferred speed-step length relationship. Journal of Biomechanical Engineering 123, 3, 264–269.Google ScholarCross Ref
24. Kwon, T., and Hodgins, J. 2010. Control systems for human running using an inverted pendulum model and a reference motion capture sequence. In Proc. Symposium on Computer Animation, ACM SIGGRAPH/Eurographics. Google ScholarDigital Library
25. Laszlo, J. F., van de Panne, M., and Fiume, E. 1996. Limit cycle control and its application to the animation of balancing and walking. In Proc. SIGGRAPH, ACM. Google ScholarDigital Library
26. Lee, S.-H., and Terzopoulos, D. 2006. Heads up!: Biomechanical modeling and neuromuscular control of the neck. ACM Transactions on Graphics 25, 3. Google ScholarDigital Library
27. Lee, Y., Terzopoulos, D., and Waters, K. 1995. Realistic modeling for facial animation. In Proc. SIGGRAPH, ACM. Google ScholarDigital Library
28. Lee, S.-H., Sifakis, E., and Terzopoulos, D. 2009. Comprehensive biomechanical modeling and simulation of the upper body. ACM Transactions on Graphics 28, 4. Google ScholarDigital Library
29. Lee, Y., Kim, S., and Lee, J. 2010. Data-driven biped control. ACM Transactions on Graphics 29, 4. Google ScholarDigital Library
30. Liu, C. K., Hertzmann, A., and Popovi?, Z. 2005. Learning physics-based motion style with nonlinear inverse optimization. ACM Transactions on Graphics 24, 3. Google ScholarDigital Library
31. Liu, M. Q., Anderson, F. C., Schwartz, M. H., and Delp, S. L. 2008. Muscle contributions to support and progression over a range of walking speeds. Journal of Biomechanics 41, 3243–3252.Google ScholarCross Ref
32. Mordatch, I., de Lasa, M., and Hertzmann, A. 2010. Robust physics-based locomotion using low-dimensional planning. ACM Transactions on Graphics 29, 3. Google ScholarDigital Library
33. Muico, U., Lee, Y., Popovi?, J., and Popovi?, Z. 2009. Contact-aware nonlinear control of dynamic characters. ACM Transactions on Graphics 28, 3. Google ScholarDigital Library
34. Murai, A., and Yamane, K. 2011. A neuromuscular locomotion controller that realizes human-like responses to unexpected disturbances. In Proc. International Conference on Robotics and Automation, IEEE, 1997–2002.Google Scholar
35. Novacheck, T. F. 1998. The biomechanics of running. Gait and Posture 7, 1, 77–95.Google ScholarCross Ref
36. Perry, J., and Burnfield, J. 2010. Gait Analysis: Normal and Pathological Function. Slack Incorporated.Google Scholar
37. Raibert, M. H., and Hodgins, J. K. 1991. Animation of dynamic legged locomotion. In Proc. SIGGRAPH, ACM. Google ScholarDigital Library
38. Schultz, G., and Mombaur, K. 2010. Modeling and optimal control of human-like running. IEEE/ASME Transactions on Mechatronics 15, 5, 783–791.Google ScholarCross Ref
39. Sherman, M., Seth, A., and Delp, S. L. 2011. Simbody: Multibody dynamics for biomedical research. In Proc. Symposium on Human Body Dynamics, Vol. 2, IUTAM, 241–261.Google Scholar
40. Sifakis, E., Neverov, I., and Fedkiw, R. 2005. Automatic determination of facial muscle activations from sparse motion capture marker data. ACM Transactions on Graphics 24, 3. Google ScholarDigital Library
41. Smith, R., 2006. Open Dynamics Engine v0.5 User Guide. http://www.ode.org/ode-latest-userguide.html, Feb.Google Scholar
42. Srinivasan, M., and Ruina, A. 2006. Computer optimization of a minimal biped model discovers walking and running. Nature 439, 72–75.Google ScholarCross Ref
43. Steele, K. M., Seth, A., Hicks, J. L., Schwartz, M. S., and Delp, S. L. 2010. Muscle contributions to support and progression during single-limb stance in crouch gait. Journal of Biomechanics 43, 2099–2105.Google ScholarCross Ref
44. Sueda, S., Kaufman, A., and Pai, D. K. 2008. Musculotendon simulation for hand animation. ACM Transactions on Graphics 27, 3. Google ScholarDigital Library
45. Taga, G. 1995. A model of the neuro-musculo-skeletal system for human locomotion. I. Emergence of basic gait. Biological Cybernetics 73, 2, 97–111.Google ScholarDigital Library
46. Timoney, J. M., Inman, W. S., Quesada, P. M., Sharkey, P. F., Barrack, R. L., Skinner, H. B., and Alexander, A. H. 1993. Return of normal gait patterns after anterior cruciate ligament reconstruction. The American Journal of Sports Medicine 21, 6, 887–889.Google ScholarCross Ref
47. Wang, J. M., Fleet, D. J., and Hertzmann, A. 2009. Optimizing walking controllers. ACM Transactions on Graphics 28, 5. Google ScholarDigital Library
48. Wang, J. M., Fleet, D. J., and Hertzmann, A. 2010. Optimizing walking controllers for uncertain inputs and environments. ACM Transactions on Graphics 29, 4. Google ScholarDigital Library
49. Waters, K. 1987. A muscle model for animation three-dimensional facial expression. In Proc. SIGGRAPH, ACM. Google ScholarDigital Library
50. Weinstein, R., Guendelman, E., and Fedkiw, R. 2008. Impulse-based control of joints and muscles. IEEE Transactions on Visualization and Computer Graphics 14, 1, 37–46. Google ScholarDigital Library
51. Wu, J.-c., and Popovi?, Z. 2010. Terrain-adaptive bipedal locomotion control. ACM Transactions on Graphics 29, 4. Google ScholarDigital Library
52. Ye, Y., and Liu, C. K. 2010. Optimal feedback control for character animation using an abstract model. ACM Transactions on Graphics 29, 4. Google ScholarDigital Library
53. Yin, K., Loken, K., and van de Panne, M. 2007. SIMBICON: Simple biped locomotion control. ACM Transactions on Graphics 26, 3. Google ScholarDigital Library
54. Yokozawa, T., Fujii, N., and Ae, M. 2007. Muscle activities of the lower limb during level and uphill running. Journal of Biomechanics 40, 15, 3467–3475.Google ScholarCross Ref
55. Zajac, F. E. 1989. Muscle and tendon: Properties, models, scaling, and application to biomechanics and motor control. Critical Reviews in Biomedical Engineering 17, 4, 359–411.Google Scholar
56. Zordan, V. B., Celly, B., Chiu, B., and DiLorenzo, P. C. 2006. Breathe easy: Model and control of human respiration for computer animation. Graphical Models 68, 2, 113–132. Google ScholarDigital Library