
“Elastic Object Manipulation Using Coarse-to-Fine Representation of Mass-Spring Models” by Kawai, Matsumiya, Yokoya and Takemura
Conference:
Type(s):
Talk Type(s):
Title:
- Elastic Object Manipulation Using Coarse-to-Fine Representation of Mass-Spring Models
Session/Category Title:
- Numerical Techniques
Presenter(s)/Author(s):
Moderator(s):
Interest Area:
- Application
Abstract:
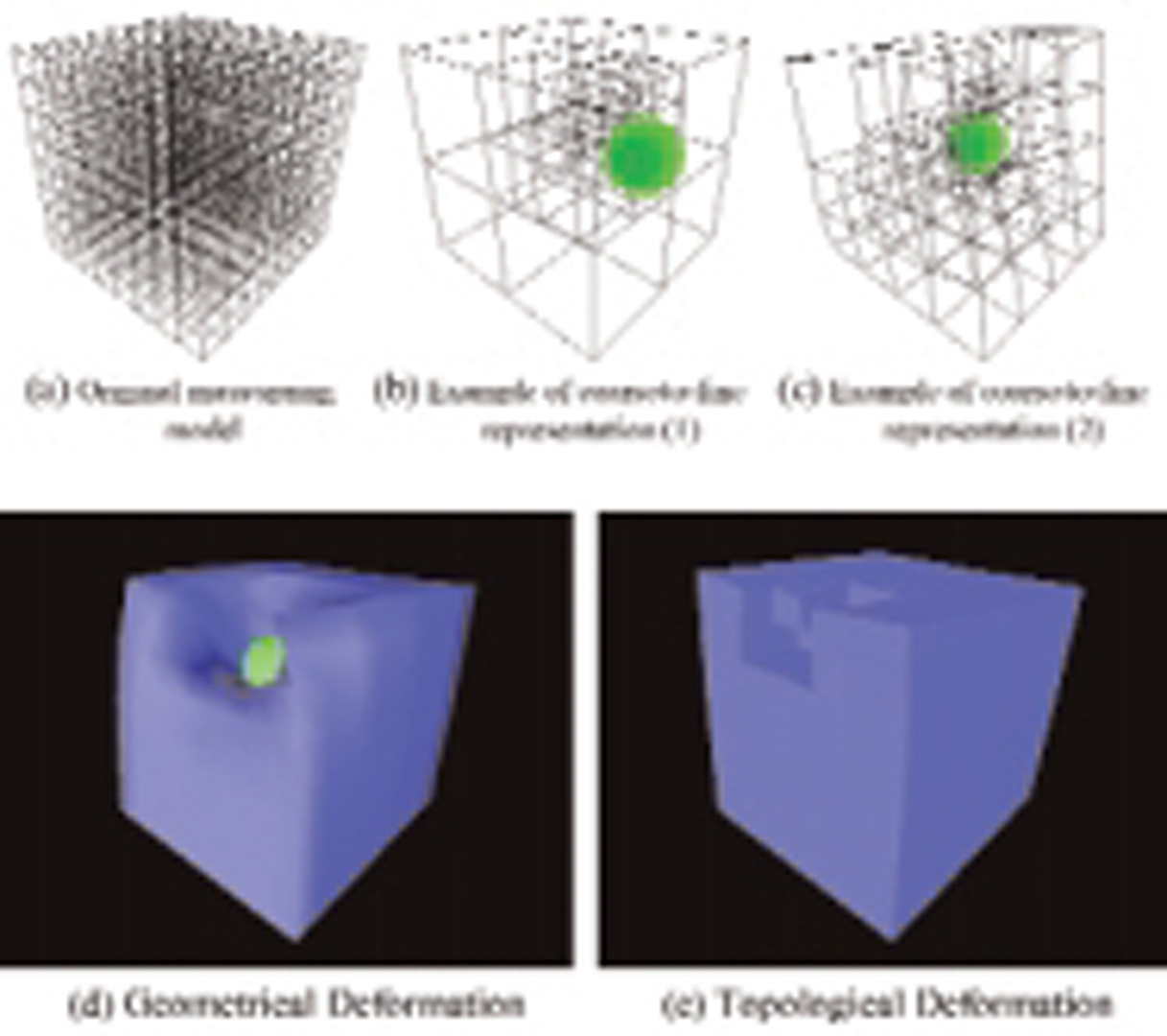
This sketch describes an efficient method for elastic-object deformation using mass-spring models with coarse-to-fine representation based on the degree of deformation. One of the key technologies for creating realistic virtual environments is real-time manipulation of elastic objects with force feedback. Mass-spring models are widely used for representing elastic objects in virtual environments because they can be applied to both geometrical and topological deformation of objects in real time. However, the increased number of mass points and springs representing more complex deformation usually makes it difficult to simulate the deformation in real time. The proposed method aims to reduce the computational cost for simulating such a complex deformation with mass-spring models.
References:
1. Miyazaki, S., Ueno, J., Yasuda, T., Yokoi, S., & Toriwaki, J. (1995). A study of virtual manipulation of elastic objects with destruction. IEEE Int. Workshop on Robot and Human Communication,.26-31.
2. Norton, A., Turk, G., Bacon, B., Gert, J., & Sweeney, P. (1991). Animation of fracture by physical modeling. Visual Computer 7, 210-219.