
“Composable controllers for physics-based character animation” by Faloutsos, Panne and Terzopoulos
Conference:
Type(s):
Title:
- Composable controllers for physics-based character animation
Presenter(s)/Author(s):
Abstract:
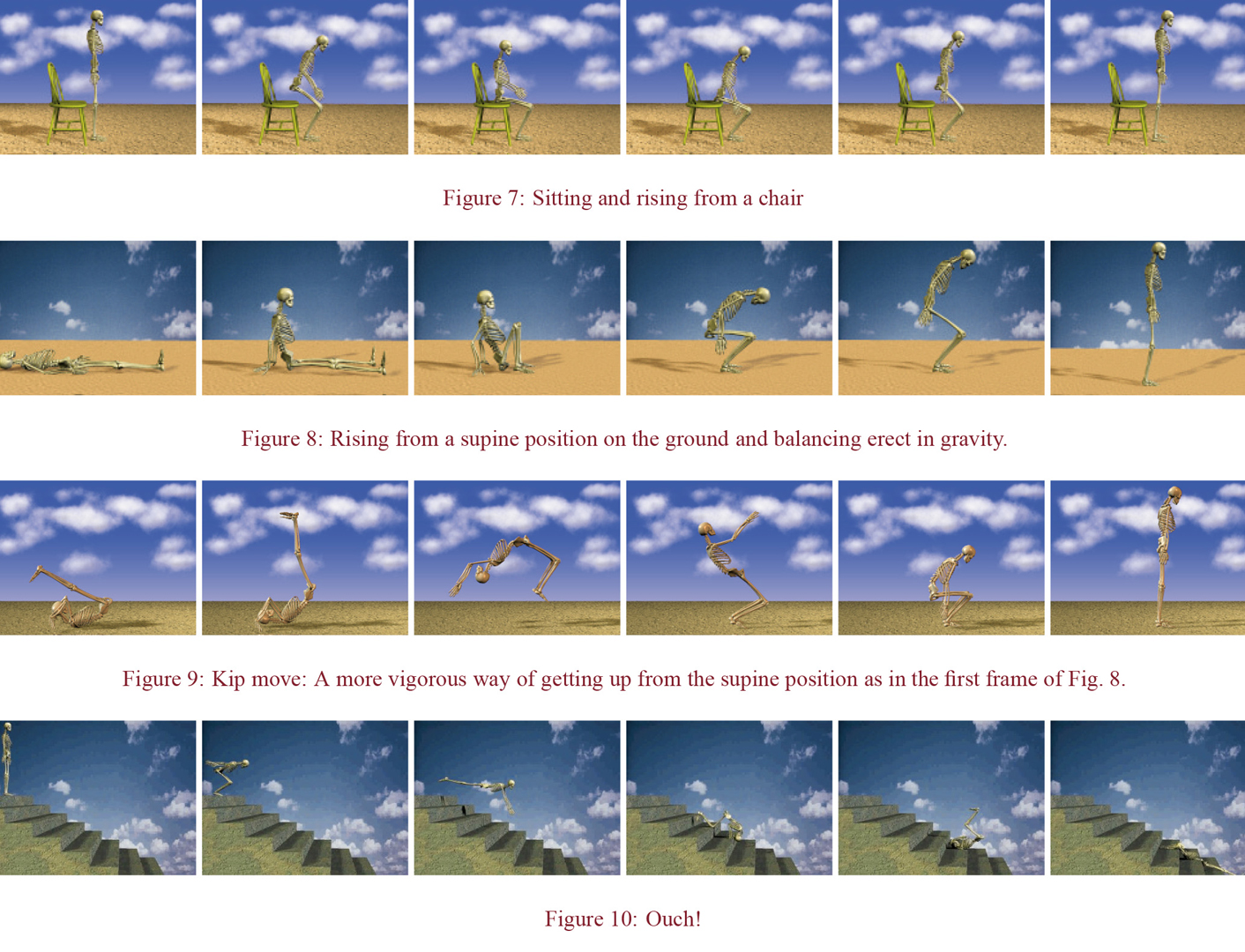
An ambitious goal in the area of physics-based computer animation is the creation of virtual actors that autonomously synthesize realistic human motions and possess a broad repertoire of lifelike motor skills. To this end, the control of dynamic, anthropomorphic figures subject to gravity and contact forces remains a difficult open problem. We propose a framework for composing controllers in order to enhance the motor abilities of such figures. A key contribution of our composition framework is an explicit model of the “pre-conditions” under which motor controllers are expected to function properly. We demonstrate controller composition with pre-conditions determined not only manually, but also automatically based on Support Vector Machine (SVM) learning theory. We evaluate our composition framework using a family of controllers capable of synthesizing basic actions such as balance, protective stepping when balance is disturbed, protective arm reactions when falling, and multiple ways of standing up after a fall. We furthermore demonstrate these basic controllers working in conjunction with more dynamic motor skills within a prototype virtual stunt-person. Our composition framework promises to enable the community of physics-based animation practitioners to easily exchange motor controllers and integrate them into dynamic characters.
References:
1. Ronald C. Arkin. Behavioral Robotics. MIT Press, 1998.]]
2. W. W. Armstrong and M. Green. The dynamics of articulated rigid bodies for purposes of animation. Proceedings of Graphics Interface ’85, pages 407-415, 1985.]]
3. N. Badler, C. Phillips, and B. Webber. Simulating Humans: Computer Graphics, Animation, and Control. Oxford University Press, 1993.]]
4. N. I. Badler, B. Barsky, and D. Zeltzer. Making Them Move. Morgan Kaufmann Publishers Inc., 1991.]]
5. C. Burges. A tutorial on support vector machines for pattern recognition. Data Mining and Knowledge Discovery, 2(2):955-974, 1998.]]
6. R. R Burridge, A. A. Rizzi, and D. E Koditschek. Sequential composition of dynamically dexterous robot behaviors. The International Journal of Robotics Research, 18(6):534-555, June 1999.]]
7. Tolga Capin, Igor Pandzic, Nadia Magnenat Thalmann, and Daniel Thalmann. Avatars in Networked Virtual Environments. John Wiley & Sons, 1999.]]
8. M. C. Do, Y. Breniere, and P. Brenguier. A biomechanical study of balance recovery during the fall forward. Journal of Biomechanics, 15(12):933-939, 1982.]]
9. R. O. Duda and P. E Hart. Pattern Classification and Scene Analysis. Wiley, 1973.]]
10. Petros Faloutsos. Composable Controller for Physics-based Character Animation. PhD thesis, Univeristy of Toronto, DCS, Toronto,Canada, 2001. To be awarded.]]
11. Petros Faloutsos, Michiel van de Panne, and Demetri Terzopoulos. Dynamic free-form deformations for animation synthesis. IEEE Transactions on Visualization and Computer Graphics, 3(3):201-214, 1997.]]
12. R. C Fitzpatrick, J. L. Taylor, and D. I. McCloskey. Ankle stiffness of standing humans in response to imperceptible perturbation: reflex and task-dependent components. Journal of Physiology, 454:533-547, 1992.]]
13. Stefan Gottschalk, Ming Lin, and Dinesh Manocha. OBB-Tree: A hierarchical structure for rapid interference detection. In Computer Graphics (SIGGRAPH 96 Proceedings), pages 171-180, 1996.]]
14. R. Grzeszczuk and D. Terzopoulos. Automated learning of muscle-based locomotion through control abstraction. Proceedings of ACMSIGGRAPH: Computer Graphics, pages 63-70, August 1995.]]
15. R. Grzeszczuk, D. Terzopoulos, and G. Hinton. Neuroanimator: Fast neural network emulation and control of physics-based models. Proceedings of ACM SIGGRAPH: Computer Graphics, pages 9-20, July 1998.]]
16. J. K. Hodgins, W. L. Wooten, D. C. Brogan, and J. F. O’Brien. Animating human athletics. Proceedings of SIGGRAPH 95, ACM Computer Graphics, pages 71- 78, 1995.]]
17. Jessica K. Hodgins and Nancy S. Pollard. Adapting simulated behaviors for new characters. Proceedings of SIGGRAPH 97, pages 153-162, August 1997.]]
18. Michael G. Hollars, Dan E. Rosenthal, and Michael A. Sherman. Sd/fast. Symbolic Dynamics, Inc., 1991.]]
19. E. T Hsiao and S. N Robinovitch. Common protective movements govern unexpected falls from standing height. Journal of biomechanics, 31:1-9, 1998.]]
20. Boston Dynamics Inc. The digital biomechanics laboratory. www.bdi.com, 1998.]]
21. T. Joachims. Making large-scale svm learning practical. advances in kernel methods. In B. Scholhopf, C. Burges, and A. Smola, editors, Support Vector Learning. MIT-Press, 1999. http://www-ai.cs.unidortmund. de/DOKUMENTE/joachims 99a.pdf.]]
22. Joseph F. Laszlo, Michiel van de Panne, and Eugene Fiume. Limit cycle control and its application to the animation of balancing and walking. Proceedings of SIGGRAPH 96, pages 155-162, August 1996.]]
23. Honda Motor Co. Ltd. www.honda.co.jp/english/technology/robot/.]]
24. Victor Ng and Petros Faloutsos. Dance: Dynamic animation and control environment. Software system, www.dgp.toronto.edu/DGP/DGPSoftware.html.]]
25. Yi-Chung Pai and James Patton. Center of mass velocity-position predictions for balance control. Journal of biomechanics, 30(4):347-354, 1997.]]
26. Marcus G. Pandy and Frank C. Anderson. Three-dimensional computer simulation of jumping and walking using the same model. In Proceedings of the VIIth International Symposium on Computer Simulation in Biomechanics, August 1999.]]
27. Marcus G. Pandy, Felix E. Zajac, Eunsup Sim, and William S. Levine. An optimal control model for maximum-height human jumping. Journal of Biomechanics, 23(12):1185-1198, 1990.]]
28. M. H. Raibert. Legged Robots that Balance. MIT Press, 1986.]]
29. Cecile Smeesters, Wilson C. Hayes, and Thomas A. McMahon. Determining fall direction and impact location for various disturbances and gait speeds using the articulated total body model. In Proceedings of the VIIth International Symposium on Computer Simulation in Biomechanics, August 1999.]]
30. Xiaoyuan Tu and Demetri Terzopoulos. Artificial fishes: Physics, locomotion, perception, behavior. Proceedings of SIGGRAPH 94, pages 43-50, 1994.]]
31. M. van de Panne. Parameterized gait synthesis. IEEE Computer Graphics and Applications, pages 40-49, March 1996.]]
32. Michiel van de Panne, Eugene Fiume, and Zvonko Vranesic. Reusable motion synthesis using state-space controllers. Computer Graphics (SIGGRAPH 90 Proceedings), 24(4):225-234, August 1990. ISBN 0-201-50933-4. Held in Dallas, Texas.]]
33. V. Vapnik. Estimation of Dependecies Based on Empirical Data (in Russian). Nauka, Moscow, 1979. English translation Springer Verlag, New York, 1982.]]
34. Jane Wilhelms and Brian A. Barsky. Using dynamic analysis to animate articulated bodies such as humans and robots. In Graphics Interface ’85, pages 97-104, May 1985.]]
35. Wayne Wooten. Simulation of Leaping, Tumbling, Landing, and Balancing Humans. PhD thesis, Georgia Institute of Technology, March 1998.]]