
“TwinCam Go: Proposal of Vehicle-Ride Sensation Sharing with Stereoscopic 3D Visual Perception and Vibro-Vestibular Feedback for Immersive Remote Collaboration”
Conference:
Experience Type(s):
Title:
- TwinCam Go: Proposal of Vehicle-Ride Sensation Sharing with Stereoscopic 3D Visual Perception and Vibro-Vestibular Feedback for Immersive Remote Collaboration
Organizer(s)/Presenter(s):
Description:
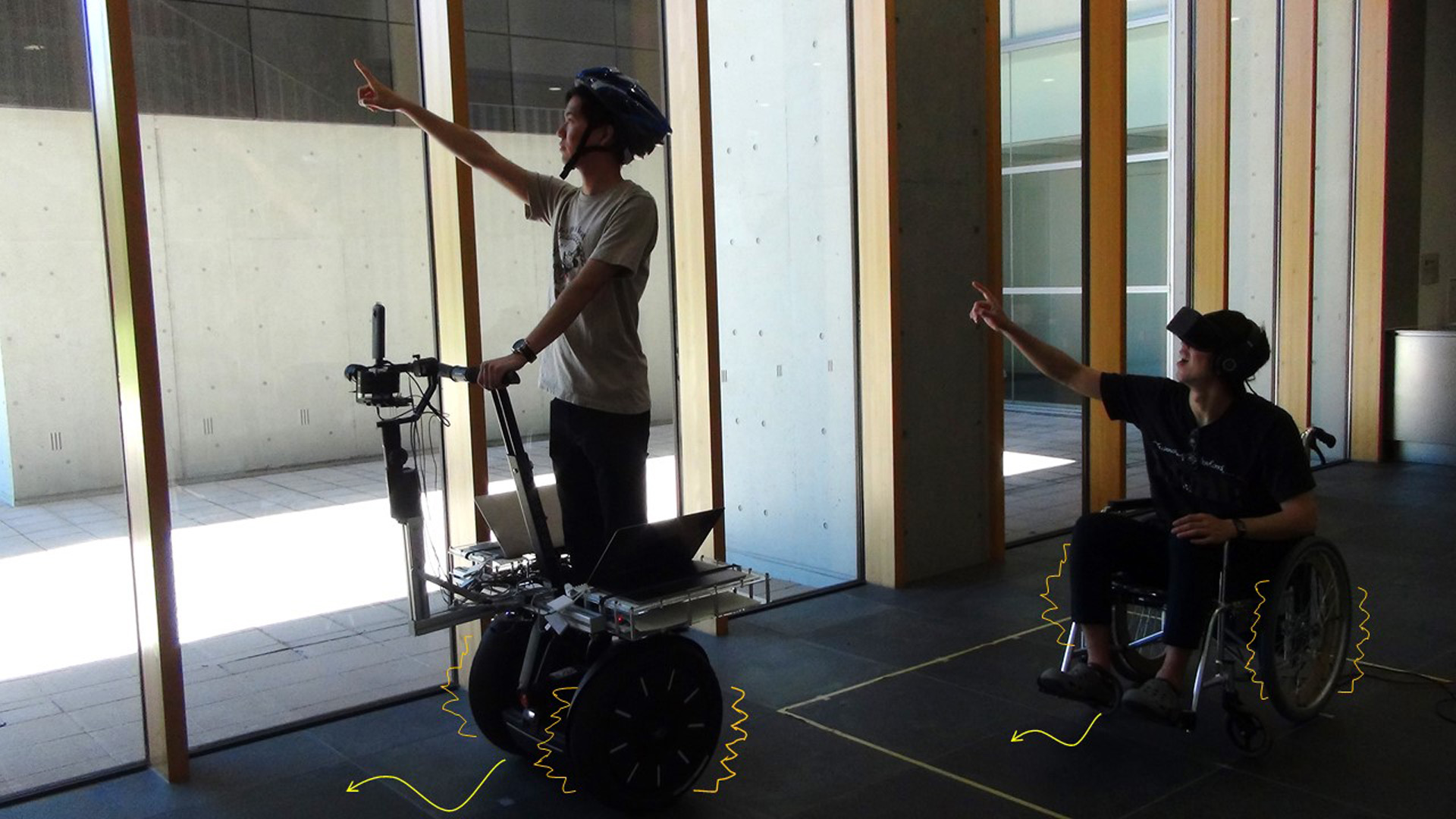
We proposed and developed a prototype of vehicle-ride sensation sharing system that enables a rider to remotely collaborate with a driver and can receive both 3D visual perception and vibro-vestibular sensation. A remote rider can collaborate with driver via voice communication and perceive motion sensation via wheelchair’s movement.
References:
[1]
Satoshi Hashizume, Ippei Suzuki, Kazuki Takazawa, Ryuichiro Sasaki, Yoshikuni Hashimoto, and Yoichi Ochiai. 2017. Telewheelchair: a demonstration of the intelligent electric wheelchair system towards human-machine. In SIGGRAPH ASIA Emerging Technologies.
[2]
Shunichi Kasahara and Jun Rekimoto. 2015. JackIn head: immersive visual telepresence system with omnidirectional wearable camera for remote collaboration. 217–225. https://doi.org/10.1145/2821592.2821608
[3]
Kento Tashiro, Toi Fujie, Yasushi Ikei, Tomohiro Amemiya, Koichi Hirota, and Michiteru Kitazaki. 2017. TwinCam: omni-directional stereoscopic live viewing camera for reducing motion blur during head rotation. In SIGGRAPH Emerging Technologies.
[4]
Vibol Yem, Ryuta Okazaki, and Hiroyuki Kajimoto. 2016. Vibrotactile and pseudo force presentation using motor rotational acceleration. 47–51. https://doi.org/10.1109/HAPTICS.2016.7463154