
“Realistic Dexterous Manipulation of Virtual Objects With Physics-based Haptic Rendering” by Xu, Wang and Hasegawa
Conference:
Experience Type(s):
Title:
- Realistic Dexterous Manipulation of Virtual Objects With Physics-based Haptic Rendering
Entry Number: 13
Organizer(s)/Presenter(s):
Interest Areas(s):
- Game / Mobile
- Interaction
- New Technologies
- Research / Education
Description:
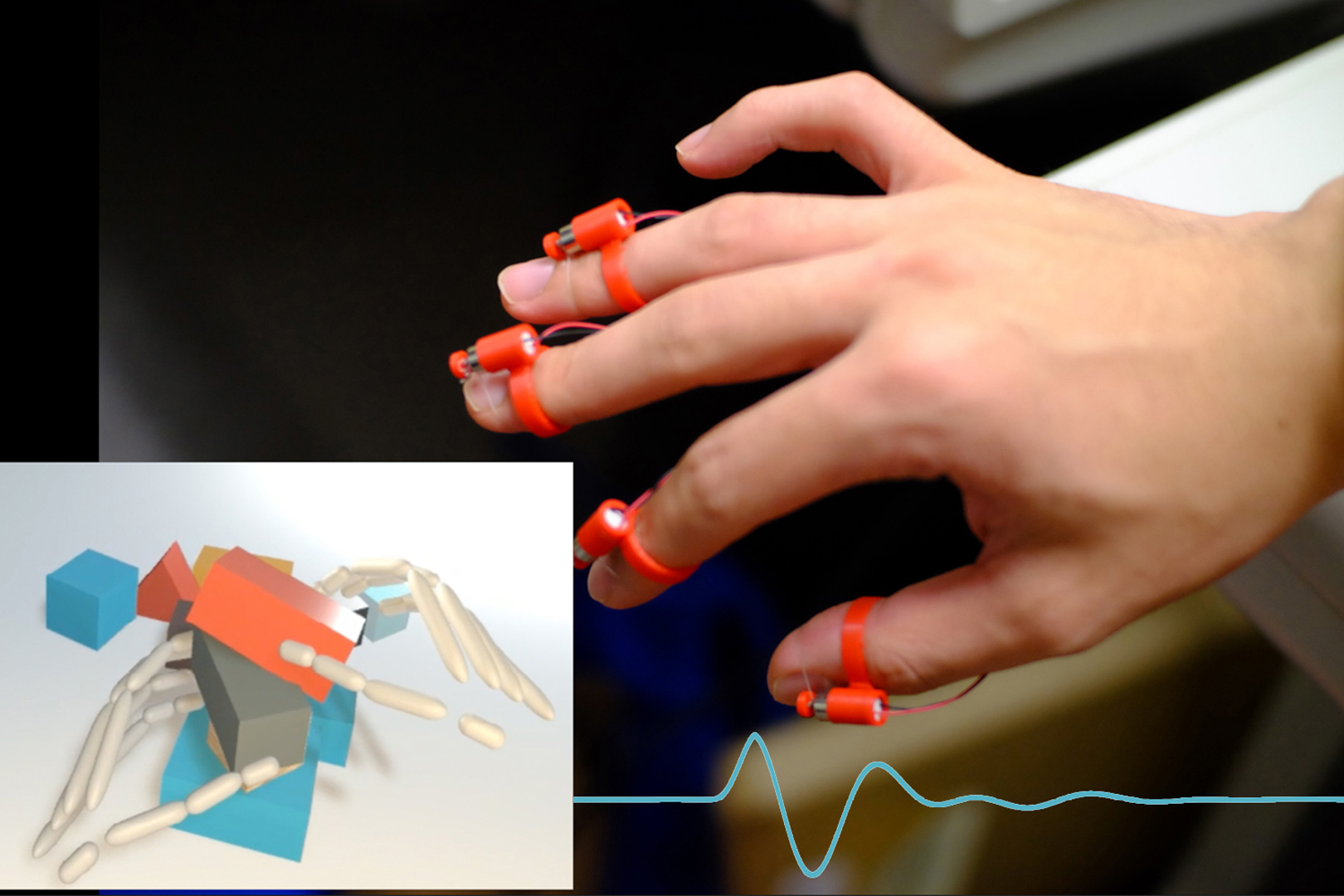
This research presents a physics-based system for the realistic manipulation of virtual objects in VR using a coreless motor as a haptic actuator and a physics engine to simulate physics effects. The device provides haptic feedback through multi-channel audio signals and does not interfere with real-world operations or hand tracking.
Overview Page:
Submit a story:
If you would like to submit a story about this experience or presentation, please contact us: historyarchives@siggraph.org