
“Palm+Act: Operation by Visually Captured 3D Force on Palm”
Conference:
Experience Type(s):
Title:
- Palm+Act: Operation by Visually Captured 3D Force on Palm
Description:
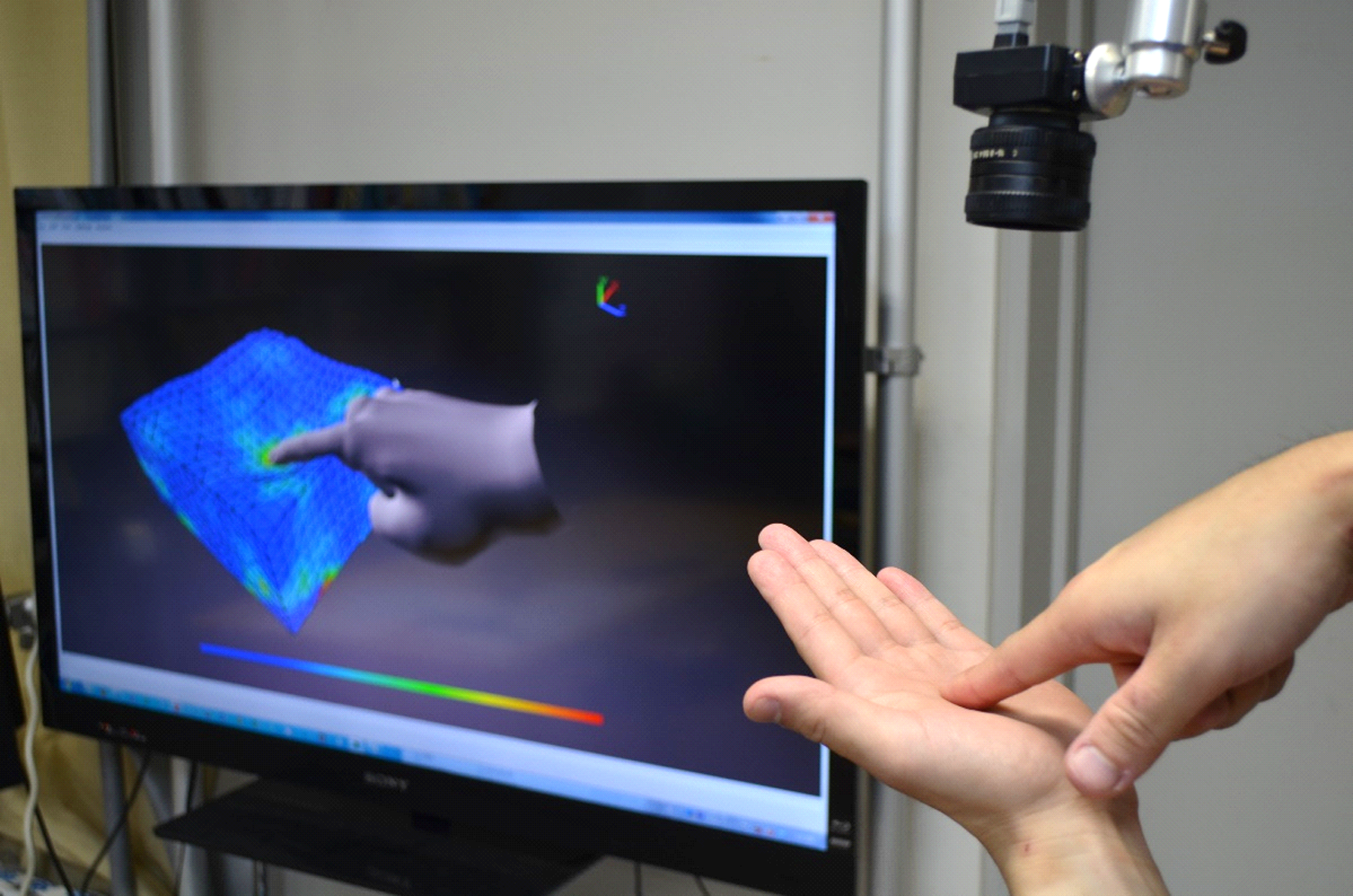
Recently, there has been considerable interest in technologies that appropriate human body parts, especially the skin, as an input surface for human-computer interfaces. Since human skin is always available and highly accessible, such on-body touch interfaces enable the control of various systems in ubiquitous environments. An interface utilizing skin as an input surface provides a mobile input system that does not require dedicated control devices for a specific system. There are many researches that demonstrate the concept of on-body touch interaction with a ubiquitous sensing device [Harrison et al. 2011].
References:
[1]
Farneback, G. 2000. Fast and accurate motion estimation using orientation tensors and parametric motion models. In Pattern Recognition, 2000. Proceedings. 15th International Conference on, vol. 1, IEEE, 135–139.
[2]
Harrison, C., Tan, D., and Morris, D. 2010. Skinput: appropriating the body as an input surface. In Proceedings of the 28th international conference on Human factors in computing systems, vol. 3, 453–462.
[3]
Harrison, C., Benko, H., and Wilson, A. D. 2011. Omnitouch: wearable multitouch interaction everywhere. In Proceedings of the 24th annual ACM symposium on User interface software and technology, UIST ’11, 441–450.
[4]
Makino, Y., Sugiura, Y., Ogata, M., and Inami, M. 2013. Tangential force sensing system on forearm. In Proceedings of the 4th Augmented Human International Conference, ACM, AH ’13, 29–34.
[5]
Sun, Y., Hollerbach, J., and Mascaro, S. 2009. Estimation of fingertip force direction with computer vision. Robotics, IEEE Transactions on 25, 6, 1356–1369.
[6]
Vlack, K., Mizota, T., Kawakami, N., Kamiyama, K., Kajimoto, H., and Tachi, S. 2005. Gelforce: a vision-based traction field computer interface. In CHI ’05 Extended Abstracts on Human Factors in Computing Systems, ACM, CHI EA ’05, 1154–1155.
[7]
Yoshimoto, S., Kuroda, Y., Imura, M., and Oshiro, O. 2012. Spatially transparent tactile sensor utilizing electromechanical properties of skin. Advanced Biomedical Engineering 1, 89–97.