
“LightAir: a Novel System for Tangible Communication with Quadcopters using Foot Gestures and Projected Image” by Matrosov, Volkova and Tsetserukou
Conference:
Experience Type(s):
Title:
- LightAir: a Novel System for Tangible Communication with Quadcopters using Foot Gestures and Projected Image
Entry Number: 16
Organizer(s)/Presenter(s):
Description:
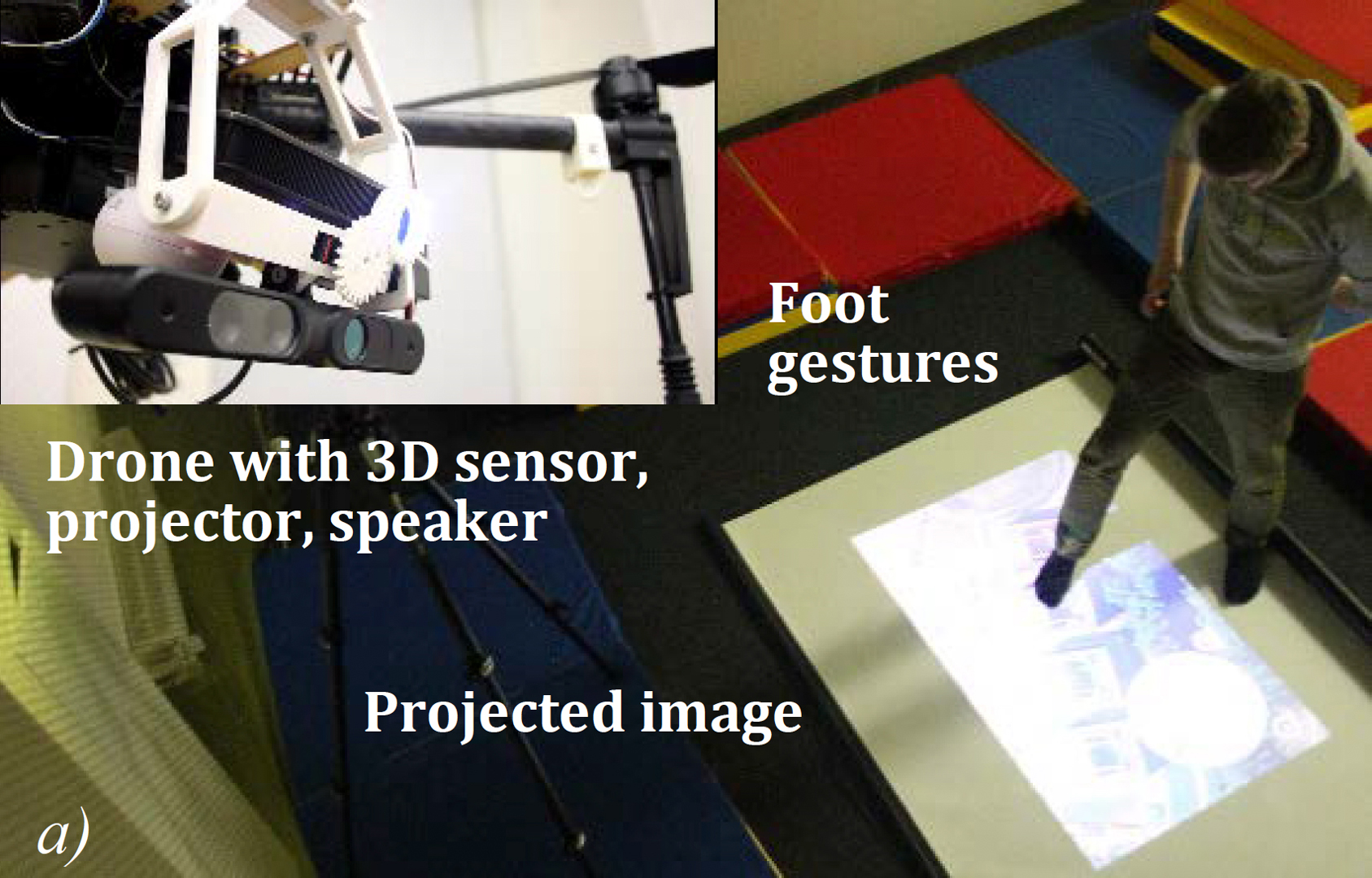
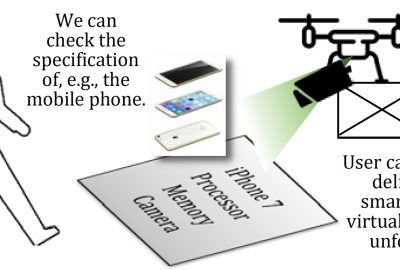
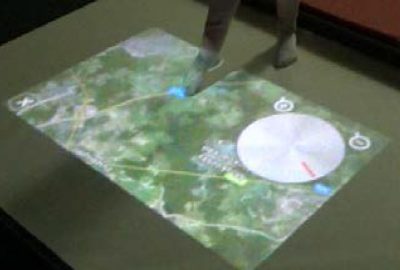
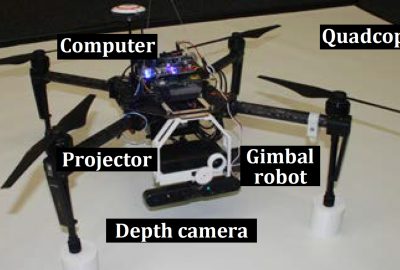
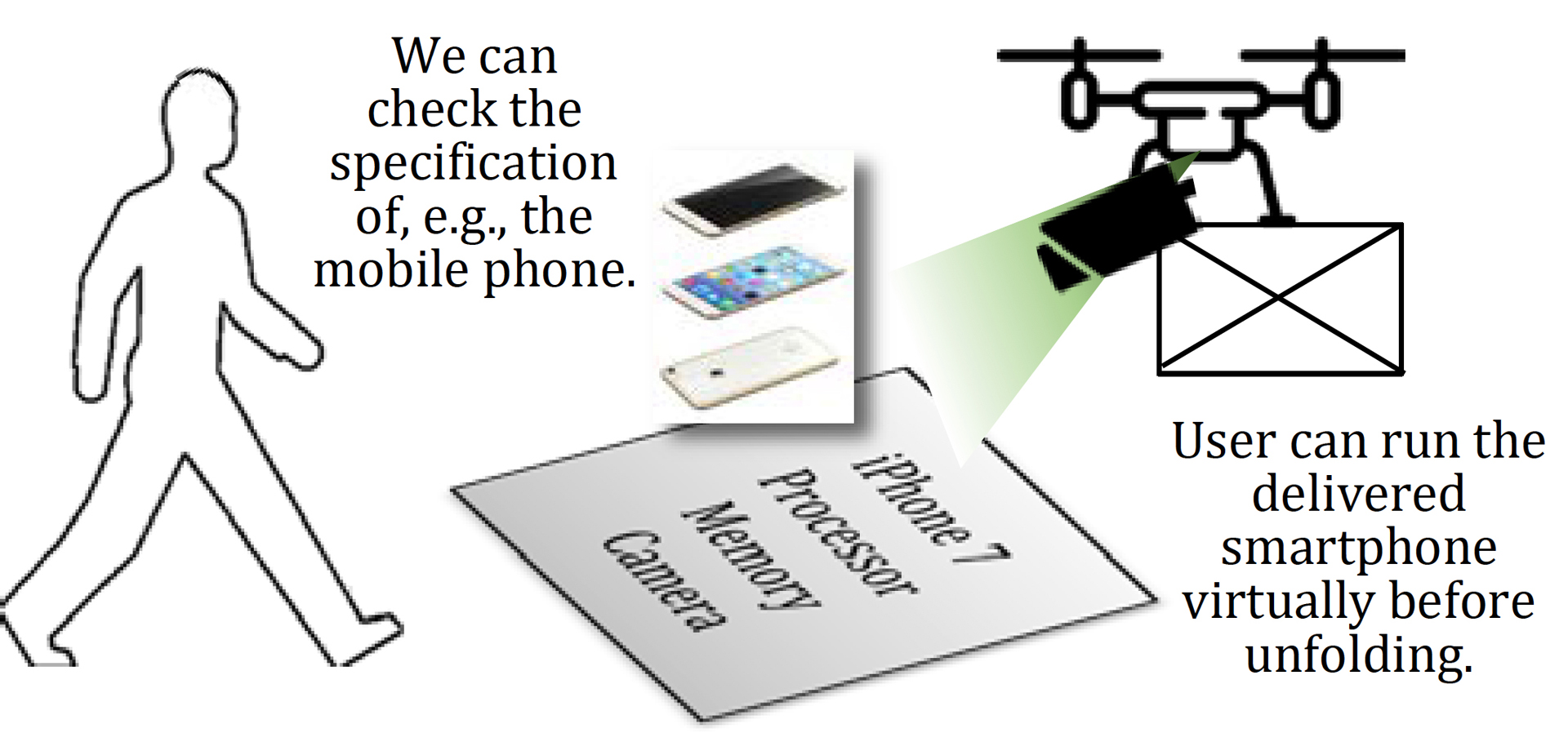
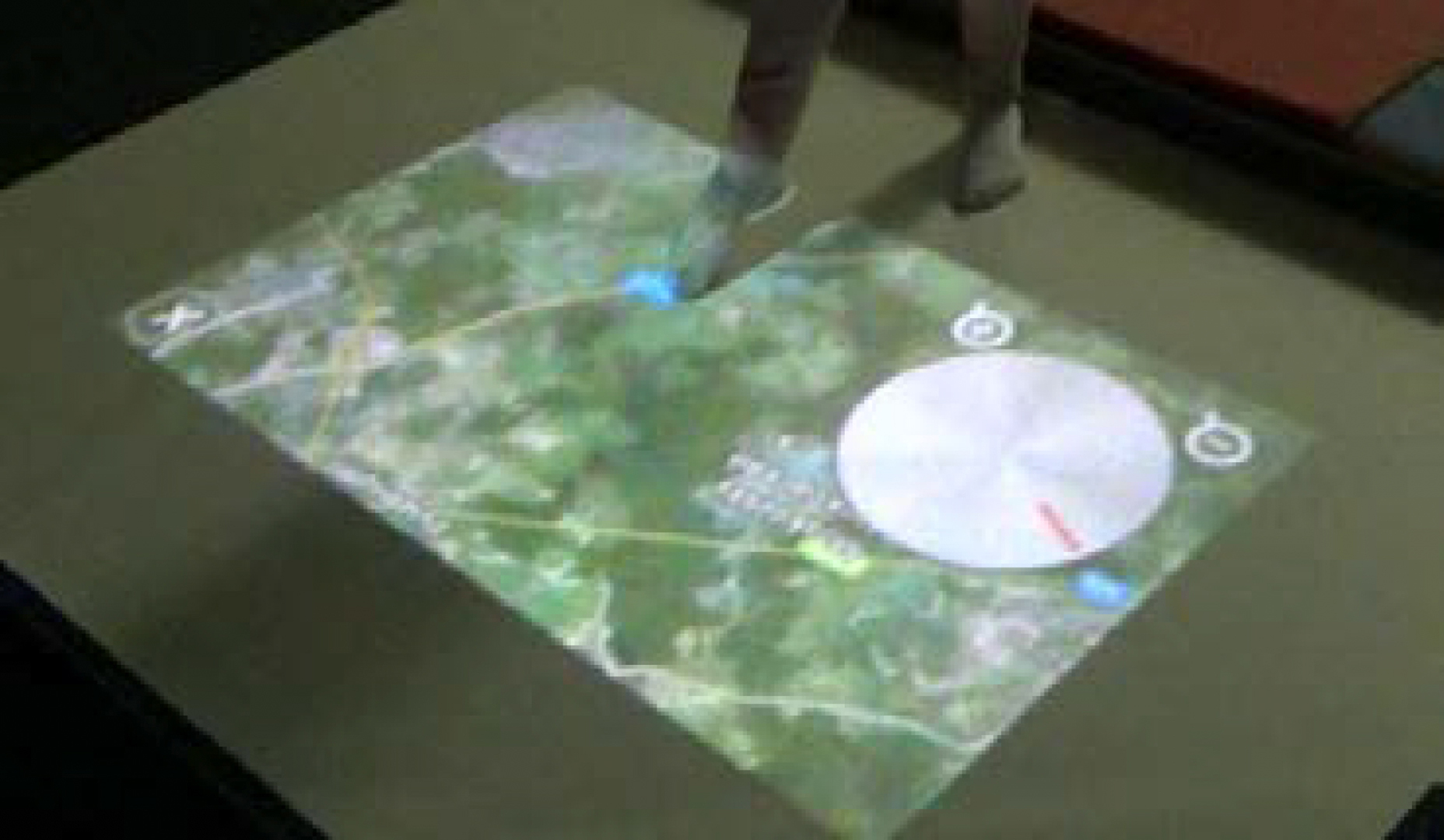
We propose a new paradigm of human-drone interaction through projecting image on the road and foot gestures. The proposed technology allowed to create a new type of tangible interaction with drone, i.e., DroneBall game for augmented sport and FlyMap to let a drone know where to fly.
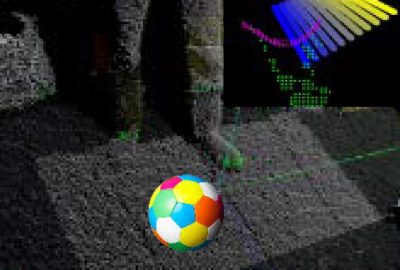
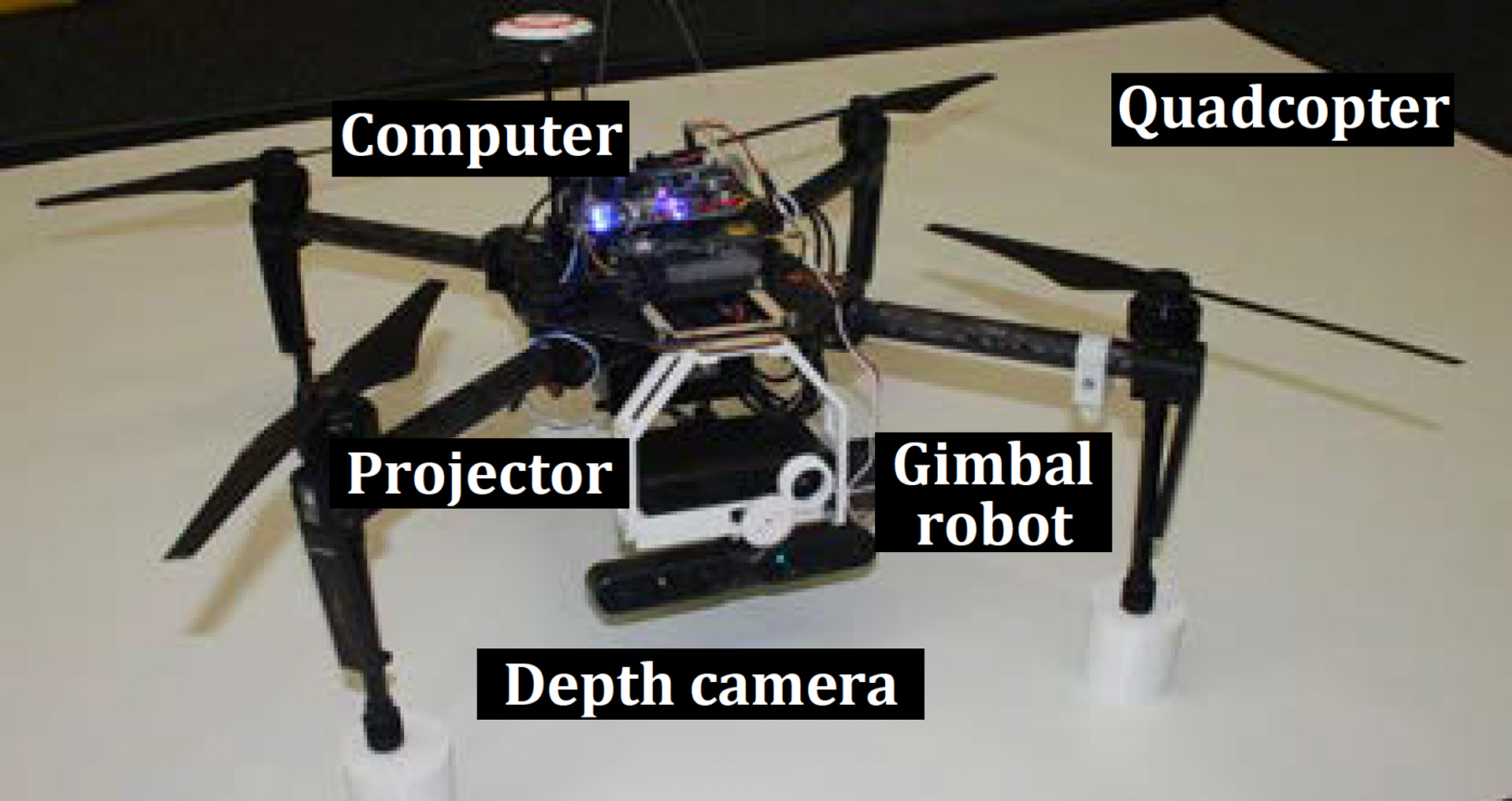
We developed LightAir system that makes possible information sharing, GPS-navigating, controlling and playing with drones in a tangible way. In contrast to the hand gestures, that are common for smartphones, we came up with the idea of foot gestures and projected image for tangible interaction. Such gestures make communication with the drone intuitive, natural, and safe. To our knowledge, it is the world’s first system that provides the human-drone bilateral tangible interaction.
References:
MISTRY, P., MAES, P. SixthSense: a wearable gestural interface. In Proceedings of SIGGRAPH Asia 2009 Emerging Technologies, ACM Press / ACM SIGGRAPH, New York, USA, SIGGRAPH ASIA’ 09, Article No. 11.
MIYOSHI, K., KONOMURA, R., HORI, K. Above Your hands: direct and natural interaction with aerial robot. In Proceedings of SIGGRAPH 2014 Emerging technologies, ACM Press / ACM SIGGRAPH, New York, USA, SIGGRAPH’ 14, Article No. 8.
SUGIYAMA, J., TSETSERUKOU, D., MIURA, J. NAVIgoid: robot navigation with haptic vision. In Proceedings of SIGGRAPH Asia 2011 Emerging Technologies, ACM Press / ACM SIGGRAPH, New York, USA, SIGGRAPH ASIA’ 11, Article No. 9.
WAIBEL, M. 2011. Controlling a quadcopter using Kinect. IEEE Spectrum, July.
Keyword(s):
- human-drone interaction
- quadcopter control
- foot gesture recognition
- Augmented reality
- digital world
- computer vision
-

- 2016 ETech Matrosov: LightAir: a Novel System for Tangible Communication with Quadcopters using Foot Gestures and Projected Image
-
- 2016 ETech Matrosov: LightAir: a Novel System for Tangible Communication with Quadcopters using Foot Gestures and Projected Image
-
- 2016 ETech Matrosov: LightAir: a Novel System for Tangible Communication with Quadcopters using Foot Gestures and Projected Image
-
- 2016 ETech Matrosov: LightAir: a Novel System for Tangible Communication with Quadcopters using Foot Gestures and Projected Image
-
- 2016 ETech Matrosov: LightAir: a Novel System for Tangible Communication with Quadcopters using Foot Gestures and Projected Image
Additional Images:

Acknowledgements:
The authors acknowledge the support by Unmanned Vehicle Program, Center for Entrepreneurship and Innovation, Skoltech.