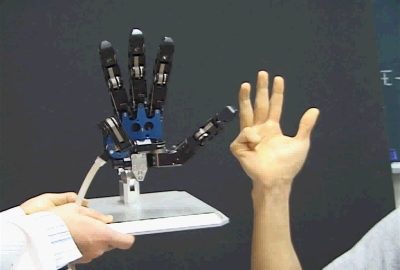
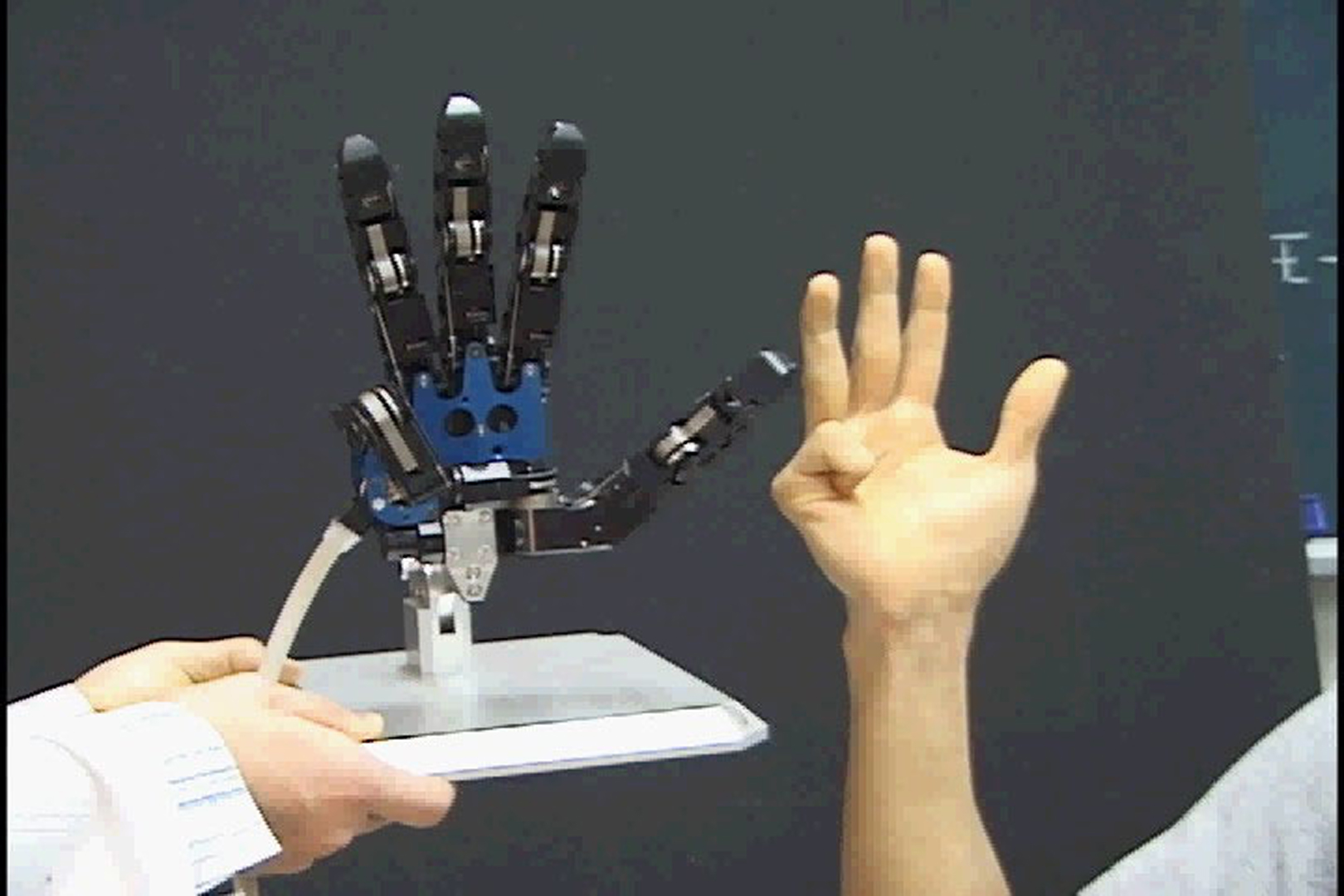
“Copycat hand” by Hoshino, Tanimoto and Kawabuchi
Conference:
Experience Type(s):
Title:
- Copycat hand
Entry Number: 04
Organizer(s)/Presenter(s):
Description:
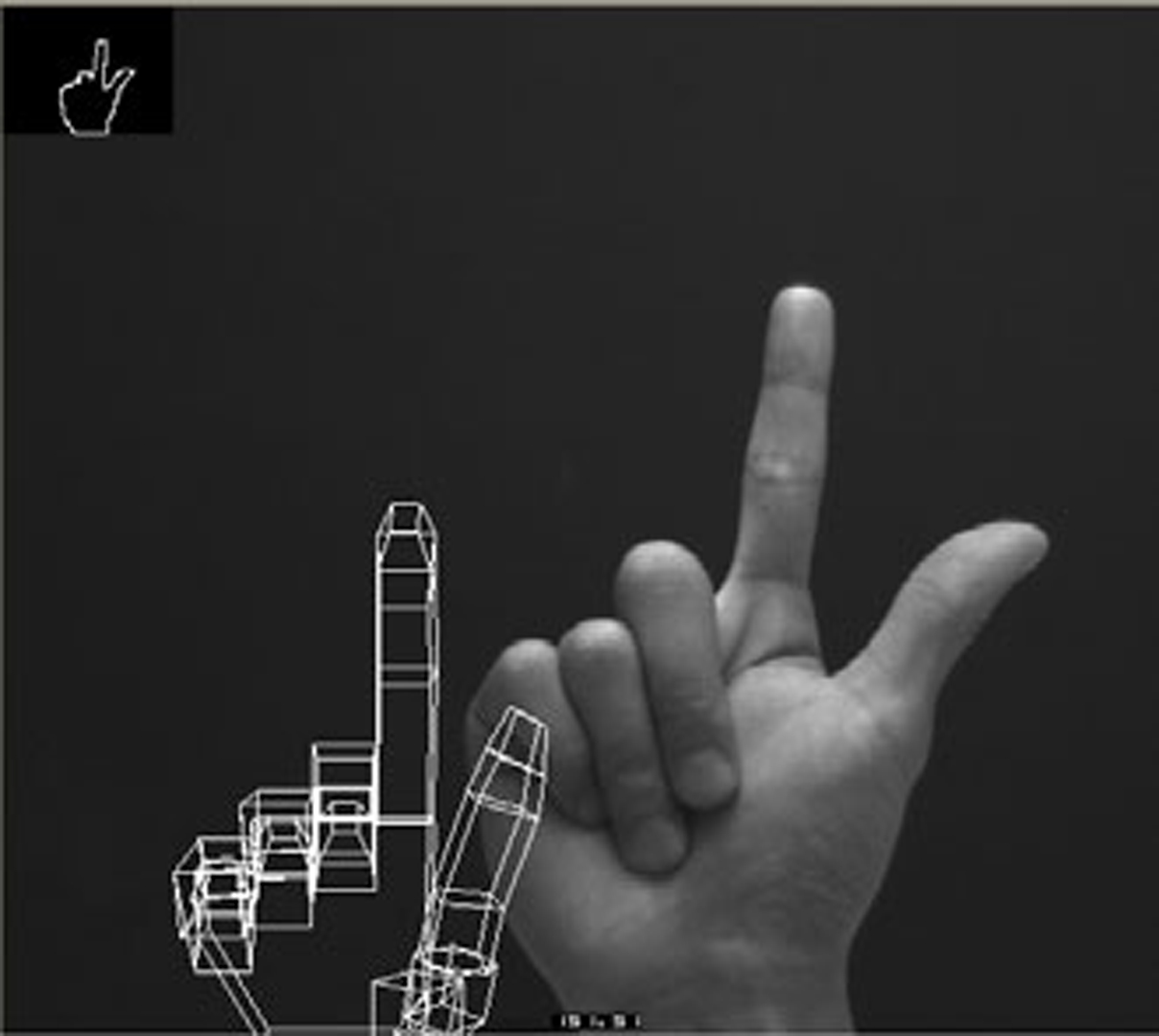
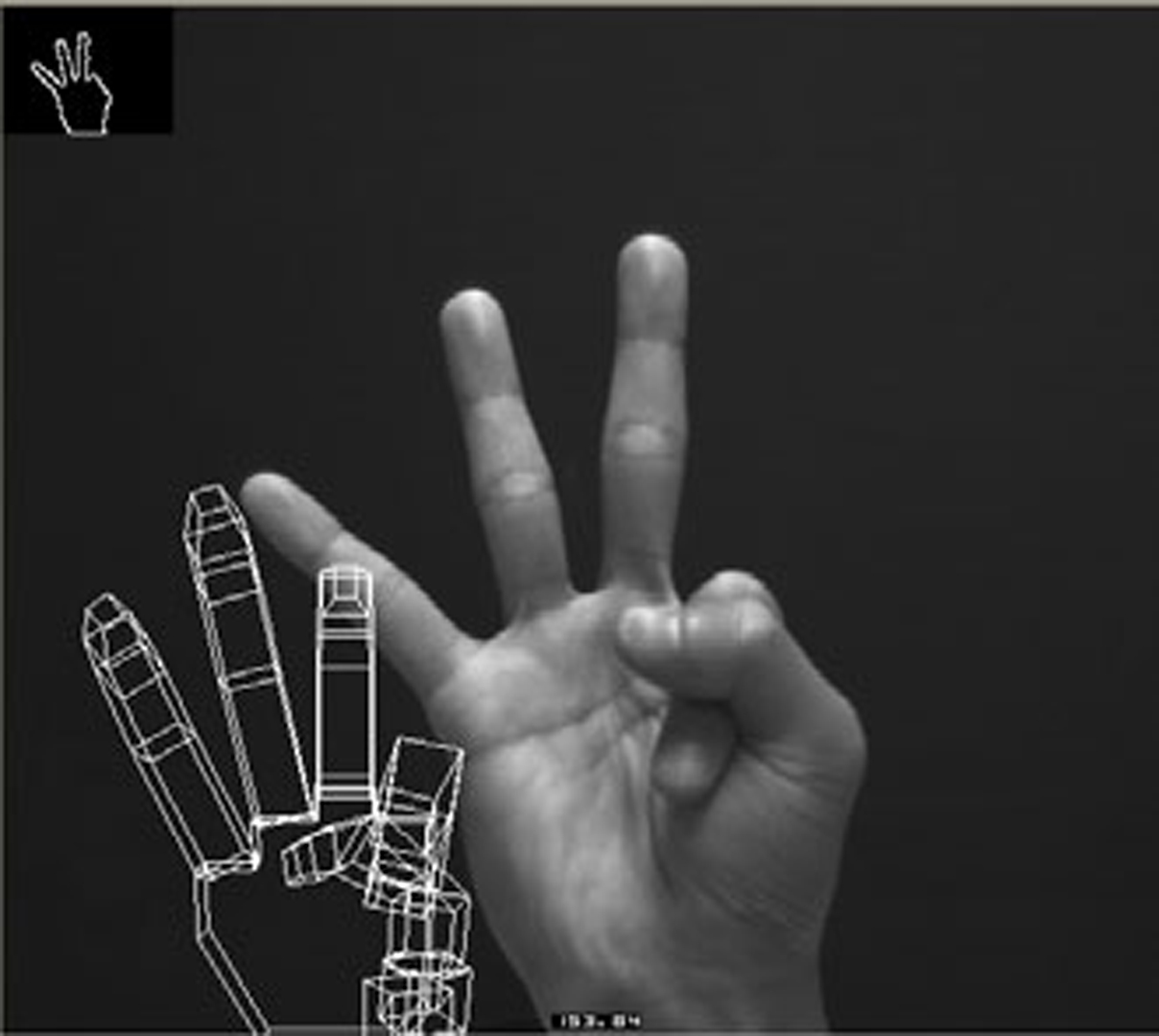
The goal of authors’ research group is to develop the robot hand system which can learn dexterous motions of the human hands by watching. We have therefore attempted realtime estimation of posture using high-speed search of similar images from database. However, our previous method has a disadvantage that search time increases in proportion to expansion of data though estimating precision gets high. Moreover, the expansion of data may scatter the processing time if the database is not efficiently constituted for high-speed search.
The present study therefore classified all the data into classes by using joint angle information of hand and fingers to let self-organizing and adopted two- or multiple- step search utilizing typical characteristic quantity of the classes. In addition, numbers of data affiliated to each class were intended as uniform by adding the algorism of self-reproduction and self-annihilation to each class in self-organization. We propose a high-speed processing above 150 fps with high-precision without deviation of search time.
Additional Images:
-

- 2006 ETech Hoshino: Copycat hand

-
- 2006 ETech Hoshino: Copycat hand
-
- 2006 ETech Hoshino: Copycat hand
-

- 2006 ETech Hoshino: Copycat hand