
“Gaze Entropy and Driver Safety: Understanding Cognitive Failure and Situational Response Before Take-over” by Chang, Jang, Kim and Yoon
Conference:
Type(s):
Title:
- Gaze Entropy and Driver Safety: Understanding Cognitive Failure and Situational Response Before Take-over
Session/Category Title:
- Interactive Techniques
Presenter(s)/Author(s):
Abstract:
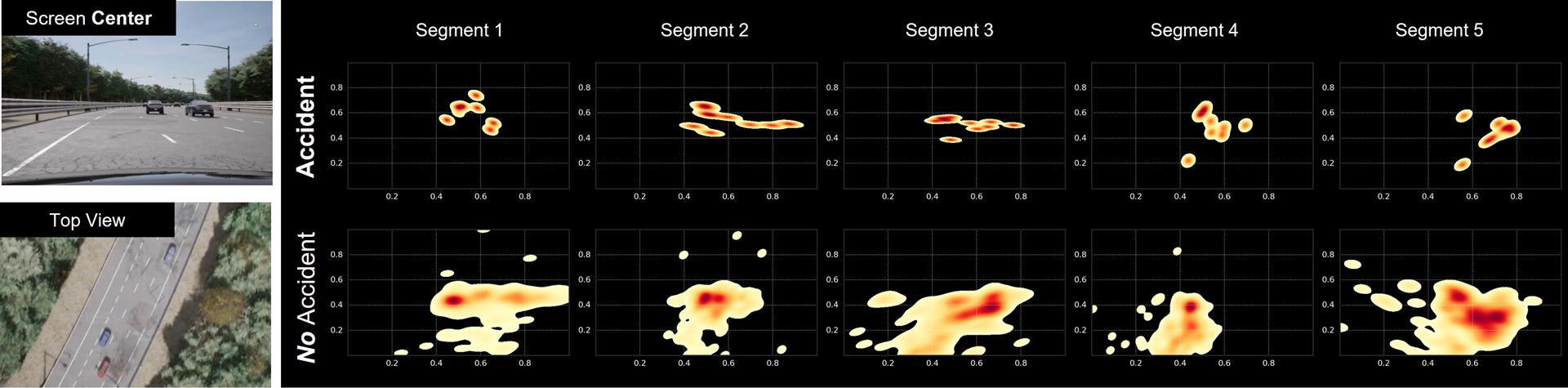
This study presents a gaze entropy–based framework to identify cognitive failures and predict accident risk before TOR(Take-Over Request) in conditionally autonomous driving. Using a Random Forest model, it enables early risk detection and offers practical insights for driver monitoring.
References:
[1] Gloria Mark, Susan Fussell, Cliff Lampe, Juan Pablo Hourcade, Caroline Appert, Daniel Wigdor, Lex Fridman, Heishiro Toyoda, Sean Seaman, Bobbie Seppelt, Linda Angell, Joonbum Lee, Bruce Mehler, and Bryan Reimer. 2017. What Can Be Predicted from Six Seconds of Driver Glances? Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems: 2805–2813.
[2] Seungwon Paik and Kyungsik Han. 2020. I Need to Step Back from It! Modeling Backward Movement from Multimodal Sensors in Virtual Reality. SIGGRAPH Asia 2020 Posters: 1–2.
[3] Philipp Stark, Alexander J. Jung, Jens-Uwe Hahn, Enkelejda Kasneci, and Richard Göllner. 2024. Using Gaze Transition Entropy to Detect Classroom Discourse in a Virtual Reality Classroom. Proceedings of the 2024 Symposium on Eye Tracking Research and Applications: 1–11.