
“ADD: analytically differentiable dynamics for multi-body systems with frictional contact” by Geilinger, Hahn, Zehnder, Bächer, Thomaszewski, et al. …
Conference:
Type(s):
Title:
- ADD: analytically differentiable dynamics for multi-body systems with frictional contact
Session/Category Title:
- Computational Robotics
Presenter(s)/Author(s):
Abstract:
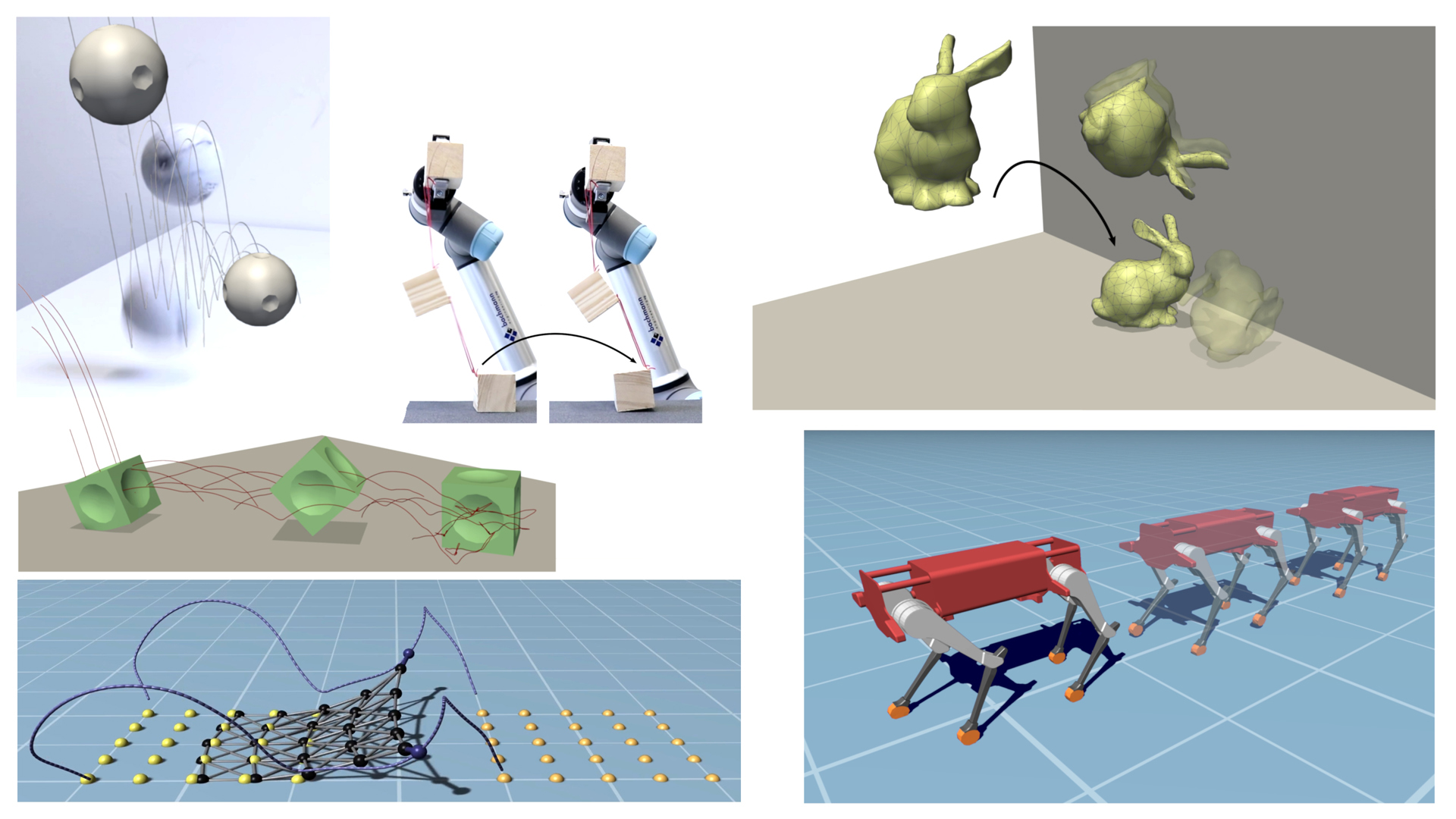
We present a differentiable dynamics solver that is able to handle frictional contact for rigid and deformable objects within a unified framework. Through a principled mollification of normal and tangential contact forces, our method circumvents the main difficulties inherent to the non-smooth nature of frictional contact. We combine this new contact model with fully-implicit time integration to obtain a robust and efficient dynamics solver that is analytically differentiable. In conjunction with adjoint sensitivity analysis, our formulation enables gradient-based optimization with adaptive trade-offs between simulation accuracy and smoothness of objective function landscapes. We thoroughly analyse our approach on a set of simulation examples involving rigid bodies, visco-elastic materials, and coupled multi-body systems. We furthermore showcase applications of our differentiable simulator to parameter estimation for deformable objects, motion planning for robotic manipulation, trajectory optimization for compliant walking robots, as well as efficient self-supervised learning of control policies.
References:
1. Jérémie Allard, François Faure, Hadrien Courtecuisse, Florent Falipou, Christian Duriez, and Paul G. Kry. 2010. Volume Contact Constraints at Arbitrary Resolution. ACM Trans. Graph. 29, 4 (2010).Google ScholarDigital Library
2. Brandon Amos and J. Zico Kolter. 2017. OptNet: Differentiable Optimization as a Layer in Neural Networks. (2017), 136–145.Google Scholar
3. M. Anitescu and F. A. Potra. 1997. Formulating Dynamic Multi-rigid-body Contact Problems with Friction as Solvable Linear Complementarity Problems. NONLINEAR DYNAMICS 14 (1997), 231–247.Google ScholarCross Ref
4. David Baraff. 1994. Fast Contact Force Computation for Nonpenetrating Rigid Bodies. In Proceedings of the 21st Annual Conference on Computer Graphics and Interactive Techniques (SIGGRAPH ’94). 23–34. Google ScholarDigital Library
5. James Bern, Pol Banzet, Roi Poranne, and Stelian Coros. 2019. Trajectory optimization for cable-driven soft robot locomotion. Robotics: Science and Systems (2019).Google ScholarCross Ref
6. Florence Bertails-Descoubes, Florent Cadoux, Gilles Daviet, and Vincent Acary. 2011. A Nonsmooth Newton Solver for Capturing Exact Coulomb Friction in Fiber Assemblies. ACM Trans. Graph. 30, 1 (2011).Google ScholarDigital Library
7. Andrew Bradley. 2013. PDE-constrained optimization and the adjoint method. Technical Report. Stanford University. https://cs.stanford.edu/~ambrad/adjoint_tutorial.pdfGoogle Scholar
8. Bernard Brogliato. 1999. Nonsmooth Mechanics: Models, Dynamics and Control. Springer.Google ScholarCross Ref
9. George E. Brown, Matthew Overby, Zahra Forootaninia, and Rahul Narain. 2019. Accurate dissipative forces in optimization integrators. ACM Transactions on Graphics 37, 6 (2019). Google ScholarDigital Library
10. Erin Catto. 2011. Reinventing the spring. https://box2d.org/files/ErinCatto_SoftConstraints_GDC2011.pdfGoogle Scholar
11. Desai Chen, David I. W. Levin, Wojciech Matusik, and Danny M. Kaufman. 2017b. Dynamics-aware numerical coarsening for fabrication design. ACM Transactions on Graphics 36, 4 (2017), 1–15. Google ScholarDigital Library
12. Xiaozhong Chen, Sheldon Andrews, Derek Nowrouzezahrai, and Paul Kry. 2017a. Ballistic Shadow Art. Proceedings of Graphics Interface 2017 Edmonton (2017), 190–198. Google ScholarCross Ref
13. Stelian Coros, Sebastian Martin, Bernhard Thomaszewski, Christian Schumacher, Robert Sumner, and Markus Gross. 2012. Deformable Objects Alive! ACM Trans. Graph. 31, 4 (2012).Google ScholarDigital Library
14. Filipe de Avila Belbute-Peres, Kevin Smith, Kelsey Allen, Josh Tenenbaum, and J. Zico Kolter. 2018. End-to-End Differentiable Physics for Learning and Control. In Advances in Neural Information Processing Systems 31. 7178–7189.Google Scholar
15. Jonas Degrave, Michiel Hermans, Joni Dambre, and Francis Wyffels. 2019. A Differentiable Physics Engine for Deep Learning in Robotics. Frontiers in Neurorobotics 13 (2019), 6.Google ScholarCross Ref
16. Ounan Ding and Craig Schroeder. 2020. Penalty Force for Coupling Materials with Coulomb Friction. IEEE Transactions on Visualization and Computer Graphics 26, 7 (2020), 2443–2455. Google ScholarCross Ref
17. Christian Duriez, Frederic Dubois, Abderrahmane Kheddar, and Claude Andriot. 2006. Realistic Haptic Rendering of Interacting Deformable Objects in Virtual Environments. IEEE Transactions on Visualization and Computer Graphics 12, 1 (2006).Google ScholarDigital Library
18. T. Erez and E. Todorov. 2012. Trajectory optimization for domains with contacts using inverse dynamics. In 2012 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems.Google Scholar
19. Kenny Erleben. 2007. Velocity-Based Shock Propagation for Multibody Dynamics Animation. ACM Trans. Graph. 26, 2 (2007), 12.Google ScholarDigital Library
20. K. Erleben, M. Macklin, S. Andrews, and P. G. Kry. 2019. The Matchstick Model for Anisotropic Friction Cones. Computer Graphics Forum (2019).Google Scholar
21. Guillermo Gallego and Anthony Yezzi. 2015. A compact formula for the derivative of a 3-D rotation in exponential coordinates. Journal of Mathematical Imaging and Vision 51, 3 (2015), 378–384.Google ScholarDigital Library
22. Moritz Geilinger, Roi Poranne, Ruta Desai, Bernhard Thomaszewski, and Stelian Coros. 2018. Skaterbots: optimization-based design and motion synthesis for robotic creatures with legs and wheels. ACM Transactions on Graphics 37, 4 (2018), 1–12.Google ScholarDigital Library
23. David Hahn, Pol Banzet, James M. Bern, and Stelian Coros. 2019. Real2Sim: visco-elastic parameter estimation from dynamic motion. ACM Transactions on Graphics 38, 6 (2019), 1–13. Google ScholarDigital Library
24. David Harmon, Etienne Vouga, Breannan Smith, Rasmus Tamstorf, and Eitan Grinspun. 2009. Asynchronous Contact Mechanics. In ACM SIGGRAPH 2009 Papers (SIGGRAPH ’09). Article 87. Google ScholarDigital Library
25. Philipp Holl, Nils Thuerey, and Vladlen Koltun. 2020. Learning to Control PDEs with Differentiable Physics. In Int. Conf. on Learning Representations. (to appear).Google Scholar
26. Shayan Hoshyari, Hongyi Xu, Espen Knoop, Stelian Coros, and Moritz Bächer. 2019. Vibration-Minimizing Motion Retargeting for Robotic Characters. ACM Transactions on Graphics 38, 4 (2019).Google ScholarDigital Library
27. Yuanming Hu, Luke Anderson, Tzu-Mao Li, Qi Sun, Nathan Carr, Jonathan Ragan-Kelley, and Frédo Durand. 2019a. DiffTaichi: Differentiable Programming for Physical Simulation. International Conference on Learning Representations (ICLR) (2019).Google Scholar
28. Yuanming Hu, Jiancheng Liu, Andrew Spielberg, Joshua B Tenenbaum, William T Freeman, Jiajun Wu, Daniela Rus, and Wojciech Matusik. 2019b. ChainQueen: A Real-Time differentiable Physical Simulator for Soft Robotics. Proceedings of IEEE International Conference on Robotics and Automation (ICRA) (2019).Google ScholarDigital Library
29. Sumit Jain and C. Karen Liu. 2011. Controlling Physics-Based Characters Using Soft Contacts. ACM Transactions on Graphics 30, 6 (2011).Google ScholarDigital Library
30. Danny M. Kaufman, Timothy Edmunds, and Dinesh K. Pai. 2005. Fast Frictional Dynamics for Rigid Bodies. ACM Transactions on Graphics 24, 3 (2005), 946–956.Google ScholarDigital Library
31. Danny M. Kaufman, Shinjiro Sueda, Doug L. James, and Dinesh K. Pai. 2008. Staggered Projections for Frictional Contact in Multibody Systems. ACM Transactions on Graphics (SIGGRAPH Asia 2008) 27, 5 (2008), 164:1–164:11.Google Scholar
32. Diederik P. Kingma and Jimmy Ba. 2014. ADAM: A Method for Stochastic Optimization. (2014). arXiv:cs.LG/http://arxiv.org/abs/1412.6980v9Google Scholar
33. Jie Li, Gilles Daviet, Rahul Narain, Florence Bertails-Descoubes, Matthew Overby, George E. Brown, and Laurence Boissieux. 2018. An Implicit Frictional Contact Solver for Adaptive Cloth Simulation. ACM Trans. Graph. 37 (2018), 15.Google ScholarDigital Library
34. Junbang Liang, Ming Lin, and Vladlen Koltun. 2019. Differentiable Cloth Simulation for Inverse Problems. In Advances in Neural Information Processing Systems 32. 772–781.Google Scholar
35. C. Karen Liu and Sumit Jain. 2012. A quick tutorial on multibody dynamics. http://fab.cba.mit.edu/classes/865.18/design/optimization/dynamics_1.pdfGoogle Scholar
36. Guillaume Loubet, Nicolas Holzschuch, and Wenzel Jakob. 2019. Reparameterizing Discontinuous Integrands for Differentiable Rendering. ACM Trans. Graph. 38, 6 (2019).Google ScholarDigital Library
37. Mickaël Ly, Romain Casati, Florence Bertails-Descoubes, Mélina Skouras, and Laurence Boissieux. 2018. Inverse Elastic Shell Design with Contact and Friction. ACM Trans. Graph. 37, 6 (2018).Google ScholarDigital Library
38. Miles Macklin, Kenny Erleben, Matthias Müller, Nuttapong Chentanez, Stefan Jeschke, and Viktor Makoviychuk. 2019. Non-smooth Newton Methods for Deformable Multi-body Dynamics. ACM Transactions on Graphics 38, 5 (2019).Google ScholarDigital Library
39. Aron Monszpart, Nils Thuerey, and Niloy J. Mitra. 2016. SMASH: Physics-Guided Reconstruction of Collisions from Videos. ACM Trans. Graph. 35, 6 (2016).Google ScholarDigital Library
40. Jorge Nocedal. 1980. Updating quasi-Newton matrices with limited storage. Math. Comp. 35, 151 (1980), 773–773. Google ScholarCross Ref
41. Keith O’Hara. 2019. OptimLib. https://www.kthohr.com/optimlib.html. 2019-11-28.Google Scholar
42. Miguel A. Otaduy, Rasmus Tamstorf, Denis Steinemann, and Markus Gross. 2009. Implicit Contact Handling for Deformable Objects. Computer Graphics Forum 28, 2.Google ScholarCross Ref
43. Simon Pabst, Bernhard Thomaszewski, and Wolfgang Straundefineder. 2009. Anisotropic Friction for Deformable Surfaces and Solids. In Proceedings of the 2009 ACM SIGGRAPH/Eurographics Symposium on Computer Animation. 149–154.Google ScholarDigital Library
44. Dinesh K. Pai, Kees van den Doel, Doug L. James, Jochen Lang, John E. Lloyd, Joshua L. Richmond, and Som H. Yau. 2001. Scanning physical interaction behavior of 3D objects. In Proceedings of the 28th annual conference on Computer graphics and interactive techniques – SIGGRAPH ’01.Google Scholar
45. Zherong Pan and Dinesh Manocha. 2018. Position-Based Time-Integrator for Frictional Articulated Body Dynamics. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE. Google ScholarCross Ref
46. Mark Pauly, Dinesh K. Pai, and Leonidas J. Guibas. 2004. Quasi-Rigid Objects in Contact. In Proceedings of the 2004 ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA ’04). Eurographics Association, 109–119.Google Scholar
47. Jovan Popović, Steven M. Seitz, Michael Erdmann, Zoran Popović, and Andrew Witkin. 2000. Interactive manipulation of rigid body simulations. In Proceedings of the 27th annual conference on Computer graphics and interactive techniques – SIGGRAPH ’00.Google ScholarDigital Library
48. Yixuan Qiu. 2019. LBFGS++. http://yixuan.cos.name/LBFGSpp. 2019-03-12.Google Scholar
49. Connor Schenck and Dieter Fox. 2018. SPNets: Differentiable Fluid Dynamics for Deep Neural Networks. In Proceedings of The 2nd Conference on Robot Learning (Proceedings of Machine Learning Research), Vol. 87. PMLR, 317–335.Google Scholar
50. Tamar Shinar, Craig A. Schroeder, and Ronald Fedkiw. 2008. Two-way Coupling of Rigid and Deformable Bodies. In Proceedings of the 2008 Eurographics/ACM SIGGRAPH Symposium on Computer Animation (SCA ’08). 95–103.Google ScholarDigital Library
51. David E. Stewart. 2000. Rigid Body Dynamics with Friction and Impact. SIAM Rev. (2000), 3–39.Google Scholar
52. David E. Stewart and J. C. Trinkle. 1996. An implicit time-stepping scheme for rigid body dynamics with inelastic collisions and coulomb friction. Internat. J. Numer. Methods Engrg. 39, 15 (1996), 2673–2691.Google ScholarCross Ref
53. Jie Tan, Greg Turk, and C. Karen Liu. 2012. Soft Body Locomotion. ACM Trans. Graph. 31, 4 (2012).Google ScholarDigital Library
54. E. Todorov. 2011. A convex, smooth and invertible contact model for trajectory optimization. In 2011 IEEE International Conference on Robotics and Automation. 1071–1076.Google ScholarCross Ref
55. E. Todorov, T. Erez, and Y. Tassa. 2012. MuJoCo: A physics engine for model-based control. In 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems.Google Scholar
56. Marc Toussaint, Kelsey Allen, Kevin Smith, and Joshua Tenenbaum. 2018. Differentiable Physics and Stable Modes for Tool-Use and Manipulation Planning. In Robotics: Science and Systems XIV. Robotics: Science and Systems Foundation.Google Scholar
57. Christopher D. Twigg and Doug L. James. 2007. Many-Worlds Browsing for Control of Multibody Dynamics. ACM Transactions on Graphics 26, 3 (2007).Google ScholarDigital Library
58. Ying Wang, Nicholas J. Weidner, Margaret A. Baxter, Yura Hwang, Danny M. Kaufman, and Shinjiro Sueda. 2019. RedMax. ACM Transactions on Graphics 38, 4 (2019). Google ScholarDigital Library
59. Peter Wriggers. 2006. Computational Contact Mechanics. Springer-Verlag GmbH.Google Scholar
60. K. Yunt and C. Glocker. 2006. Trajectory optimization of mechanical hybrid systems using SUMT. In 9th IEEE International Workshop on Advanced Motion Control.Google Scholar
61. Simon Zimmermann, Roi Poranne, James M. Bern, and Stelian Coros. 2019b. Puppet-Master: robotic animation of marionettes. ACM Transactions on Graphics 38, 4 (2019). Google ScholarDigital Library
62. Simon Zimmermann, Roi Poranne, and Stelian Coros. 2019a. Optimal control via second order sensitivity analysis. CoRR (2019). http://arxiv.org/abs/1905.08534Google Scholar