
“Controlling physics-based characters using soft contacts”
Conference:
Type(s):
Title:
- Controlling physics-based characters using soft contacts
Session/Category Title:
- Animation
Presenter(s)/Author(s):
Abstract:
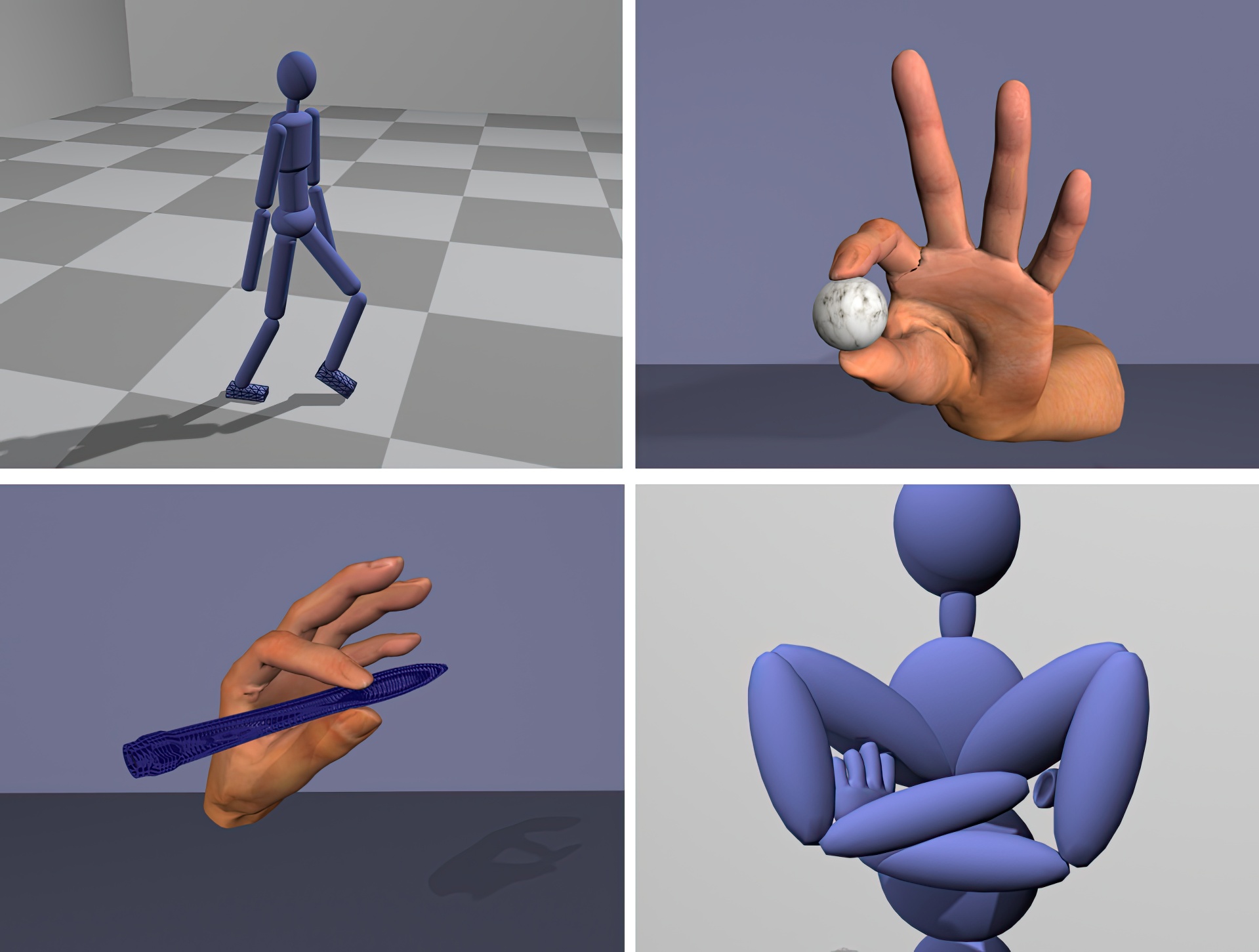
In this paper, we investigate the impact of the deformable bodies on the control algorithms for physically simulated characters. We hypothesize that ignoring the effect of deformable bodies at the site of contact negatively affects the control algorithms, leading to less robust and unnatural character motions. To verify the hypothesis, we introduce a compact representation for an articulated character with deformable soft tissue and develop a practical system to simulate two-way coupling between rigid and deformable bodies in a robust and efficient manner. We then apply a few simple and widely used control algorithms, such as pose-space tracking control, Cartesian-space tracking control, and a biped controller (SIMBICON), to simulate a variety of behaviors for both full-body locomotion and hand manipulation. We conduct a series of experiments to compare our results with the motion generated by these algorithms on a character comprising only rigid bodies. The evaluation shows that the character with soft contact can withstand larger perturbations in a more noisy environment, as well as produce more realistic motion.
References:
1. Abe, Y., da Silva, M., and Popović, J. 2007. Multiobjective control with frictional contacts. In Eurographics/SIGGRAPH Symposium on Computer Animation, 249–258. Google ScholarDigital Library
2. Allard, J., Faure, F., Courtecuisse, H., Falipou, F., Duriez, C., and Kry, P. G. 2010. Volume contact constraints at arbitrary resolution. ACM Trans. Graph. 29. Google ScholarDigital Library
3. Allen, B., Curless, B., and Popović, Z. 2002. Articulated body deformation from range scan data. ACM Transactions on Graphics 21, 3 (July), 612–619. Google ScholarDigital Library
4. Anitescu, M., and Potra, F. A. 1997. Formulating dynamic multi-rigid-body contact problems with friction as solvable linear complementarity problems. Nonlinear Dynamics 14, 231–247.Google ScholarCross Ref
5. Capell, S., Green, S., Curless, B., Duchamp, T., and Popović, Z. 2002. Interactive skeleton-driven dynamic deformations. ACM Transactions on Graphics 21, 3 (July), 586–593. Google ScholarDigital Library
6. Chardonnet, J.-R., David, A., Kheddar, A., and Yokoi, K. 2008. Interactive dynamic simulator for humanoid robotswith deformable soles. In 26th Annual Conference of the Robotics Society of Japan (RSJ).Google Scholar
7. Coros, S., Beaudoin, P., Yin, K., and van de Panne, M. 2008. Synthesis of constrained walking skills. ACM Trans. Graph 27, 5, 113. Google ScholarDigital Library
8. Coros, S., Beaudoin, P., and van de Panne, M. 2010. Generalized biped walking control. ACM Trans. Graph. (SIGGRAPH) 29, 4, 1–9. Google ScholarDigital Library
9. Cutkosky, M., and Kao, I. 1989. Computing and controlling the compliance of a robotic hand. IEEE Transactions on Robotics and Automation 5, 2.Google ScholarCross Ref
10. da Silva, M., Abe, Y., and Popović, J. 2008. Interactive simulation of stylized human locomotion. ACM Trans. Graph. (SIGGRAPH) 27, 3, 1–10. Google ScholarDigital Library
11. Galoppo, N., Otaduy, M. A., Tekin, S., Gross, M. H., and Lin, M. C. 2007. Soft articulated characters with fast contact handling. Comput. Graph. Forum 26, 3, 243–253.Google ScholarCross Ref
12. Gourret, J.-P., Thalmann, N. M., and Thalmann, D. 1989. Simulation of object and human skin deformations in a grasping task. In ACM SIGGRAPH, 21–30. Google ScholarDigital Library
13. Kim, J., and Pollard, N. S. 2011. Direct control of simulated non-human characters. IEEE Computer Graphics and Applications (In Press). Google ScholarCross Ref
14. Kim, J., and Pollard, N. S. 2011. Fast simulation of skeleton-driven deformable body characters. ACM Transactions on Graphics (In Press). Google ScholarDigital Library
15. Kry, P. G., and Pai, D. K. 2006. Interaction capture and synthesis. ACM Trans. on Graphics 25, 3 (Aug.), 872–880. Google ScholarDigital Library
16. Kry, P., James, D. L., and Pai, D. K. 2002. Eigenskin: Real time large deformation character skinning in hardware. In Eurographics/SIGGRAPH Symposium on Computer Animation. Google ScholarDigital Library
17. Lee, Y., Kim, S., and Lee, J. 2010. Data-driven biped control. ACM Trans. Graph. (SIGGRAPH) 29, 4, 1–8. Google ScholarDigital Library
18. Lewis, J. P., Cordner, M., and N., F. 2000. Pose space deformations: A unified approach to shape interpolation and skeleton-driven deformation. ACM Trans. on Graphics (SIGGRAPH) 19, 3 (July). Google ScholarDigital Library
19. Liu, C. K. 2009. Dextrous manipulation from a grasping pose. ACM Transactions on Graphics (SIGGRAPH) 28, 3. Google ScholarDigital Library
20. Magnenat-Thalmann, N., Laperrière, R., and Thalmann, D. 1988. Joint-dependent local deformations for hand animation and object grasping. In Graphics Interface, 26–33. Google ScholarDigital Library
21. Maya, A. Autodesk Maya, http://usa.autodesk.com/.Google Scholar
22. Mohr, A., and Gleicher, M. 2003. Building efficient, accurate character skins from examples. ACM Trans. on Graphics (SIGGRAPH) 22, 3 (July). Google ScholarDigital Library
23. Mordatch, I., de Lasa, M., and Hertzmann, A. 2010. Robust physics-based locomotion using low-dimensional planning. ACM Trans. Graph. (SIGGRAPH) 29, 4, 1–8. Google ScholarDigital Library
24. Muico, U., Lee, Y., Popović, J., and Popović, Z. 2009. Contact-aware nonlinear control of dynamic characters. In ACM Trans. Graph. (SIGGRAPH), 1–9. Google ScholarDigital Library
25. Park, S. I., and Hodgins, J. K. 2006. Capturing and animating skin deformation in human motion. ACM Transactions on Graphics 25, 3 (July), 881–889. Google ScholarDigital Library
26. Pauly, M., Pai, D. K., and Guibas, L. J. 2004. Quasi-rigid objects in contact. In ACM SIGGRAPH/Eurographics Symposium on Computer animation, 109–119. Google ScholarDigital Library
27. SIMBICON, 2007. www.cs.ubc.ca/?van/simbicon_cef.Google Scholar
28. Stewart, D. E., and Trinkle, J. C. 1996. An implicit time-stepping scheme for rigid body dynamics with inelastic collisions and coulomb friction. International Journal for Numerical Methods in Engineering 39, 15, 2673–2691.Google ScholarCross Ref
29. Turner, R., and Thalmann, D. 1993. The elastic surface layer model for animated character construction. In Proceedings of Computer Graphics International.Google Scholar
30. Wang, X. C., and Phillips, C. 2002. Multi-weight enveloping: Least-squares approximation techniques for skin animation. In Eurographics/SIGGRAPH Symposium on Computer Animation. Google ScholarDigital Library
31. Wang, J. M., Fleet, D. J., and Hertzmann, A. 2009. Optimizing walking controllers. ACM Trans. Graph. (SIGGRAPH Asia) 28, 5, 1–8. Google ScholarDigital Library
32. Wang, J. M., Fleet, D. J., and Hertzmann, A. 2010. Optimizing walking controllers for uncertain inputs and environments. ACM Trans. Graph. (SIGGRAPH) 29, 4, 1–8. Google ScholarDigital Library
33. Xydas, N., and Kao, I. 1998. Modeling of contact mechanics with experimental results for soft fingers. In IEEE/RSJ International Conference on Intelligent Robots and System.Google Scholar
34. Yamaguchi, J., Takanishi, A., and Kato, I. 1995. Experimental development of a foot mechanism with shock absorbing material for acquisition of landing surface position information and stabilization of dynamic biped walking. In IEEE International Conference on Robotics and Automation.Google Scholar
35. Yamane, K., and Nakamura, Y. 2006. Stable penalty-based model of frictional contacts. In ICRA, 1904–1909.Google Scholar
36. Ye, Y., and Liu, C. K. 2010. Optimal feedback control for character animation using an abstract model. ACM Trans. Graph. (SIGGRAPH) 29, 4, 1–9. Google ScholarDigital Library
37. Yin, K., Loken, K., and van de Panne, M. 2007. Simbicon: simple biped locomotion control. ACM Trans. Graph. (SIGGRAPH) 26, 3, 105. Google ScholarDigital Library