
“Ultrasound-Driven Passive Haptic Actuator Based on Amplifying Radiation Force Using Simple Lever Mechanism” by Morisaki, Makino, Fujiwara and Shinoda
Conference:
Experience Type(s):
Title:
- Ultrasound-Driven Passive Haptic Actuator Based on Amplifying Radiation Force Using Simple Lever Mechanism
Organizer(s)/Presenter(s):
Description:
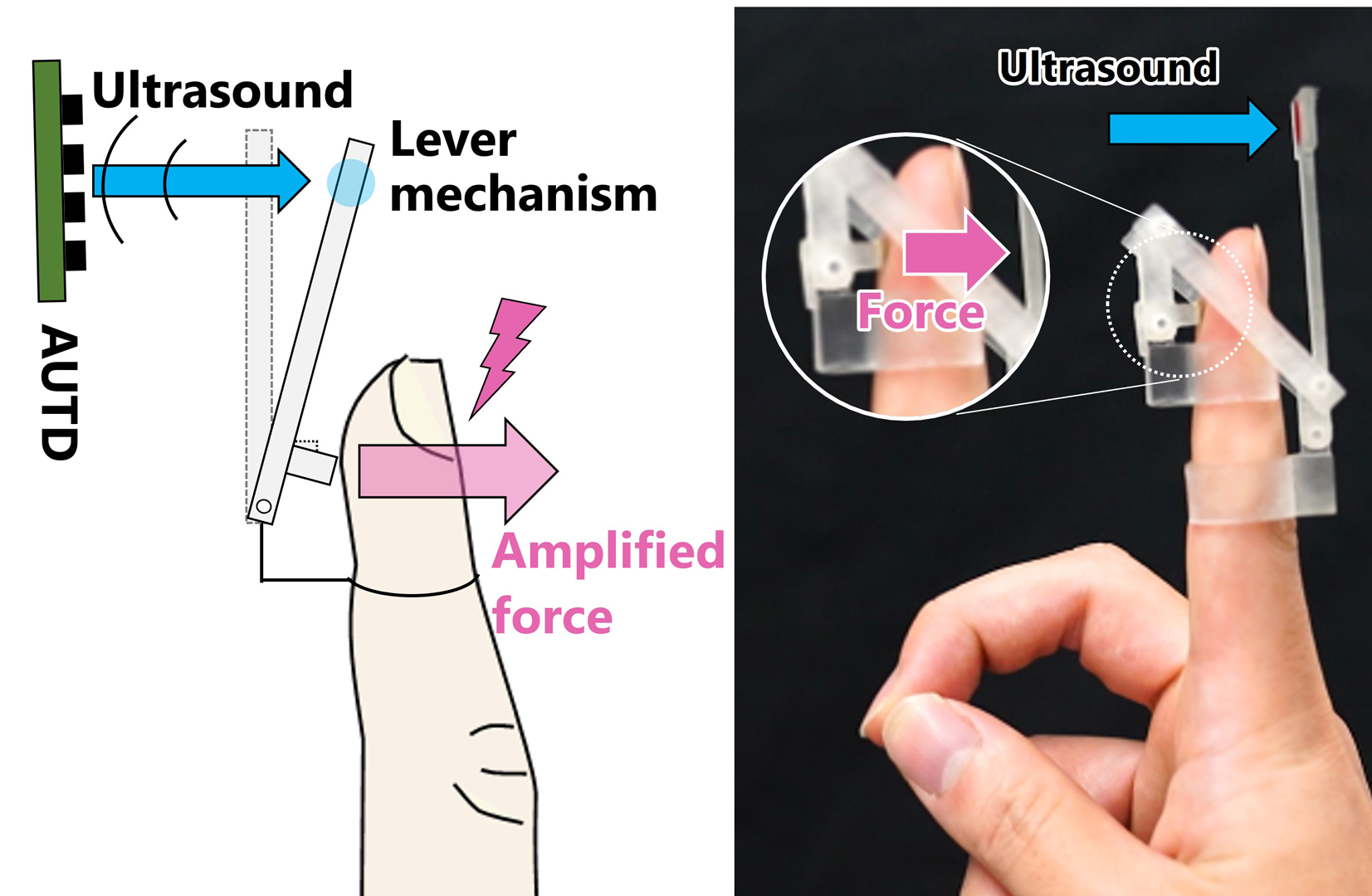
Haptics is a promising modality, which realizes intuitive human motion guidance and an immersive game experience. For a natural tactile experience, a lightweight and powerful wearable haptic device is required. In this study, we develop a lightweight passive haptic device (6.2 g) remotely driven by airborne ultrasound. This device can present a strong haptic stimulus of 400 mN (40 gf) by amplifying the applied ultrasound acoustic radiation force 19.6 times using a simple lever mechanism. Moreover, since the radiation force is presented at the sound velocity, the presentation speed of the amplified force is still high. In this demo, participants can experience a lightweight passive haptic actuator worn on their fingertips. This device can present a static force of 400 mN and low-frequency vibration in 45 ms. We also demonstrate an earring-type passive haptic device, which presents a haptic stimulus to the earlobe.
References:
[1] Tom Carter, Sue Ann Seah, Benjamin Long, Bruce Drinkwater, and Sriram Subramanian. 2013. UltraHaptics: multi-point mid-air haptic feedback for touch surfaces. In Proceedings of the 26th annual ACM symposium on User interface software and technology. ACM, 505–514.
[2] Keisuke Hasegawa and Hiroyuki Shinoda. 2018. Aerial vibrotactile display based on multiunit ultrasound phased array. IEEE transactions on haptics 11, 3 (2018), 367–377.
[3] Takayuki Hoshi, Masafumi Takahashi, Takayuki Iwamoto, and Hiroyuki Shinoda. 2010. Noncontact tactile display based on radiation pressure of airborne ultrasound. IEEE Transactions on Haptics 3, 3 (2010), 155–165.
[4] Xiong Lu, Yuxing Yan, Beibei Qi, Huang Qian, Junbin Sun, and Aaron Quigley. 2022. Contactless haptic display through magnetic field control. IEEE Transactions on Haptics(2022).
[5] Adam J Spiers and Aaron M Dollar. 2016. Design and evaluation of shape-changing haptic interfaces for pedestrian navigation assistance. IEEE transactions on haptics 10, 1 (2016), 17–28.
[6] Shun Suzuki, Seki Inoue, Masahiro Fujiwara, Yasutoshi Makino, and Hiroyuki Shinoda. 2021. AUTD3: Scalable airborne ultrasound tactile display. IEEE Transactions on Haptics 14, 4 (2021), 740–749.