
“Development of a stereoscopic projection mapping system using a small mobile robot” by Katayama, Mizuno and Funahashi
Conference:
Type(s):
Title:
- Development of a stereoscopic projection mapping system using a small mobile robot
Session/Category Title:
- Rendering & Displays
Presenter(s)/Author(s):
Abstract:
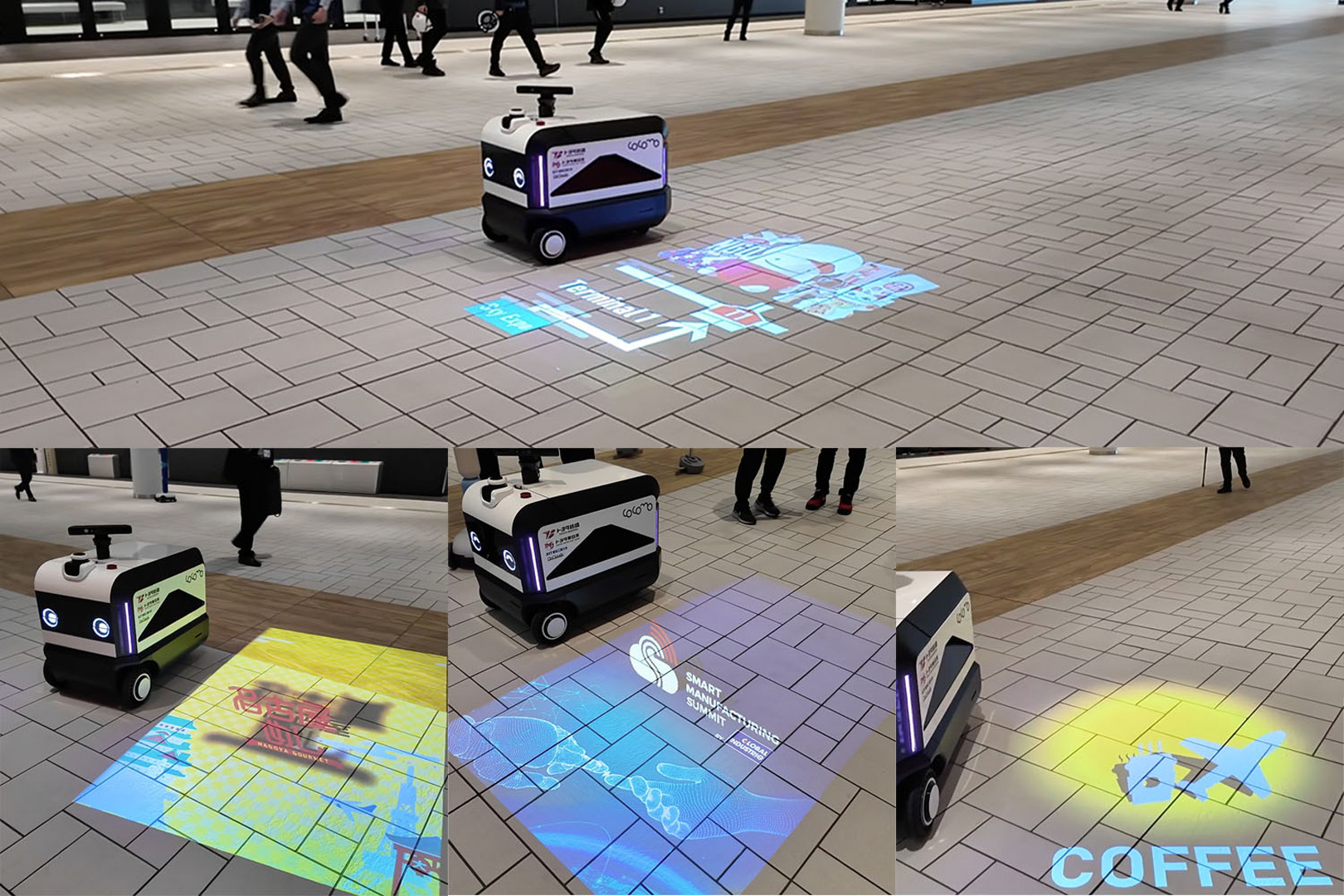
We have developed a projection mapping system using a small mobile robot. This system incorporates a projector inside the robot, and projects images onto the floor while moving. When the system detects a person, it stops moving and projects stereoscopic images for the person while facing them.
References:
[1]
S. Ahn and S. Mizuno. 2022. Development of 3D projection mapping from a moving vehicle to observe from inside and outside of the vehicle. ACM SIGGRAPH 2022 Posters13 (2022).
[2]
VJSUAVE. 2019. Suaveciclo. https://vjsuave.com/suaveciclo/ (2019).
ACM Digital Library Publication:
Overview Page:
Submit a story:
If you would like to submit a story about this presentation, please contact us: historyarchives@siggraph.org