
“A Virtual World for an Autonomous Underwater Vehicle” by Brutzman
Conference:
Experience Type(s):
Title:
- A Virtual World for an Autonomous Underwater Vehicle
Program Title:
- The Edge
Entry Number: 20
Organizer(s)/Presenter(s):
Collaborator(s):
- Michael J. Zyda
- Paul T. Barham
- John S. Falby
- Anthony J. Healey
- Shirley Isakari
- Rodney Luck
- Robert B. Mcghee
- David R. Pratt
- Lawrence J. Ziomek
Project Affiliation:
- Naval Postgraduate School
Description:
The problem: A critical bottleneck exists in autonomous underwater vehicle (AUV) design and development. It is tremendously difficult to observe, communicate with, and test underwater robots, because they operate in a remote and hazardous environment where physical dynamics and sensing modalities are counterintuitive.
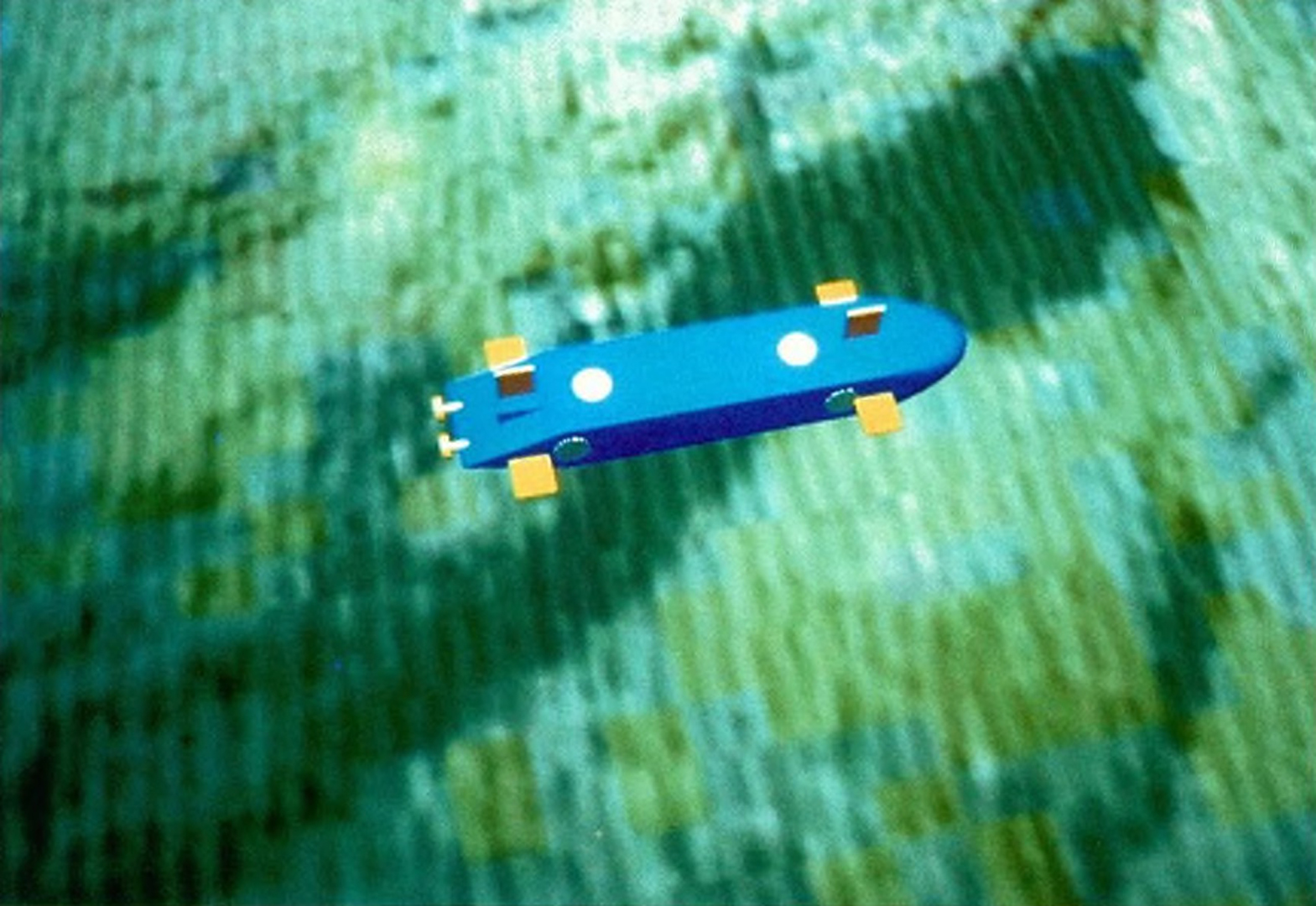
The solution: An underwater virtual world can comprehensively model all salient functional characteristics of the real world in real time. This virtual world is designed from the perspective of the robot, enabling realistic AUV evaluation and testing in the laboratory. The window into the virtual world is 3D real-time graphics technology.
AUV development difficulties: The primary difficulty facing AUV developers is a challenging physical environment. An operating AUV is inaccessible, remote, and unattended, and there is clear empirical evidence of a severe bottleneck in underwater robotics.
There are perhaps a dozen working AUVs in existence, each with limited functionality. AUV failure in the ocean is unacceptable for several reasons: any failure may become catastrophic, recovery may be difficult or pointless, and replacement costs in time and money are prohibitive. Reliability, stability and autonomy are paramount, AUV constraints are often worst-case for any type of robot due to the underwater environment, and many theoretical and engineering problems remain open.
Why an underwater virtual world? ?Virtual world system… characteristics are seeing and interacting with distant, expensive, hazardous, or non-existent 3D environments. The technology for ?seeing? is real-time, interactive 3D computer graphics and the technology for ?interacting? is evolving and varied.? (Zyda 1992) The current underwater robot development paradigm is inadequate and costly. Piecemeal design verification and individual component simulations are not adequate to develop and evaluate artificial-intelligence-based robot systems. Virtual-world systems allow people or robots to see and interact within synthetic environments. The research goal is to provide a completely functional target environment in the lab, with adequate simulation scope and interaction capability to overcome the inherent design handicaps of classical simulation approaches. AUV virtual worlds may break the AUV development bottleneck.
AUV virtual world characteristics: The underwater virtual world must recreate the complete environment external to the robot. Robot sensors and analog devices must be modeled accurately. The behavior of robot physical dynamics must be adequately simulated, since underwater vehicles are prone to non-linear dynamic instabilities and unpredicted physical responses may result in vehicle loss. To minimize sources of simulation error, an exact copy of robot hardware and software is plugged into the virtual world using physical or logical sensor and actuator connections. The difference between operation in a virtual world or an actual environment must be transparent to the robot. Finally, successful implementation of a virtual world can be validated by identical robot performance in each domain. This is a type of Turing test from the robot?s perspective: if robot performance is identical in each domain, then the virtual world is functionally equivalent to the real world.
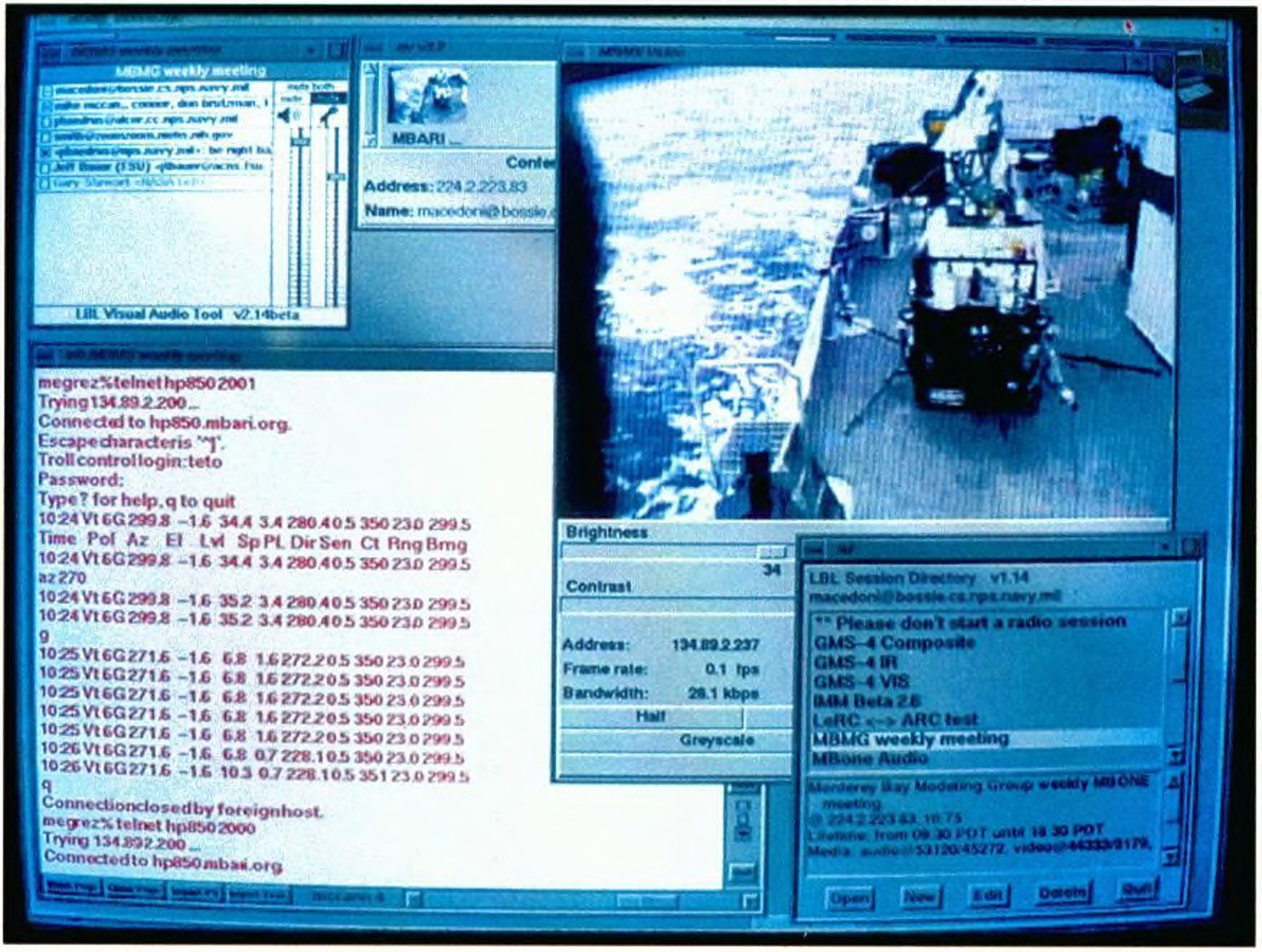
Sonar visualization: Visualization of robot sensor interactions within a virtual world permits sophisticated analyses of robot performance that are otherwise unavailable. Sonar visualization permits researchers to accurately ?look? over the robot?s shoulder or even ?see? through the robot?s eyes to intuitively understand sensor environment interactions. The overwhelming size and information content of ocean and robot datasets means that visualization is essential to extract meaning from numerous simultaneous quantitative relationships. Visualization of the robot in its surroundings greatly improves human understanding.
Networking: Distribution of underwater virtual world components enables scalability and realtime response. The IEEE Distributed Interactive Simulation (DIS) version 2.0.3 protocol is used for compatible interaction with other virtual worlds listening on the Internet. This project is an excellent application to take advantage of a high-bandwidth information superhighway, which can further extend the capabilities of multiple researchers. The network approach allows many individuals dynamic remote access, which is demonstrated by MBONE transmission of video, graphics, and sound for collaboration with other participants outside The Edge. Providing hypermedia access via publicly available World Wide Web network browsers such as Mosaic makes a complete variety of pertinent archived information available to anyone, including images, papers, datasets, software, sound clips, text, and any other computer-storable media.
A new paradigm shift in the making? Within two lifetimes, we have seen major paradigm shifts in the ways that people record information. Handwriting gave way to typing, and then typing to word processing. It was only a short while afterwards that preparing text with graphic images became easily accessible, enabling individuals to perform desktop publishing. Now, people can use 3D real-time interactive graphics simulations and dynamic ?documents? with multimedia hooks to record and communicate information. This project indicates the possibility of a paradigm shift for researchers. The long-term potential of virtual worlds is to serve as an archive and interaction medium, combining massive and dissimilar datasets and datastreams of every conceivable type. Virtual worlds will then enable comprehensive and consistent interaction by humans, robots, and software agents within those massive datasets, datastreams, and models that recreate reality.
Research conclusions: Construction of an underwater virtual world is feasible. Using 3D real-time graphics in an underwater virtual world enables effective AUV development. Visualization of robot interactions in an underwater virtual world improves our perceptual ability to evaluate robot performance. A networked robot and virtual world makes robotics research and collaboration accessible worldwide. This project presents the frontier of 3D real-time graphics for underwater robotics, ocean exploration, sonar visualization, and worldwide scientific collaboration.
References:
Brutzman, Donald P. 1994. A Virtual World for an Autonomous Underwater Vehicle, Ph.D. dissertation, Naval Postgraduate School, Monterey, California, June 1994.
Zyda, Michael J., Pratt, David R„ Falby, John S. & Kelleher, Kristen M. 1993. The software required for the computer generation of virtual environments. Presence: Teleoperators and Virtual Environments, vol. 2 no. 2, Spring 1993, 130-140.
(Additional references available upon request or via anonymous ftp. For details, see NPS Mosaic home page file://taurus.cs.nps.navy.mil/pub/mo saic/nps_mosaic.html#AUV.)