“Phygital Field: Integrated Field with Visible Images and Robot Swarm Controlled by Invisible Images” by Hiraki, Takahashi, Goto, Fukushima and Naemura
Conference:
Type(s):
Title:
- Phygital Field: Integrated Field with Visible Images and Robot Swarm Controlled by Invisible Images
Presenter(s)/Author(s):
Entry Number:
- 85
Abstract:
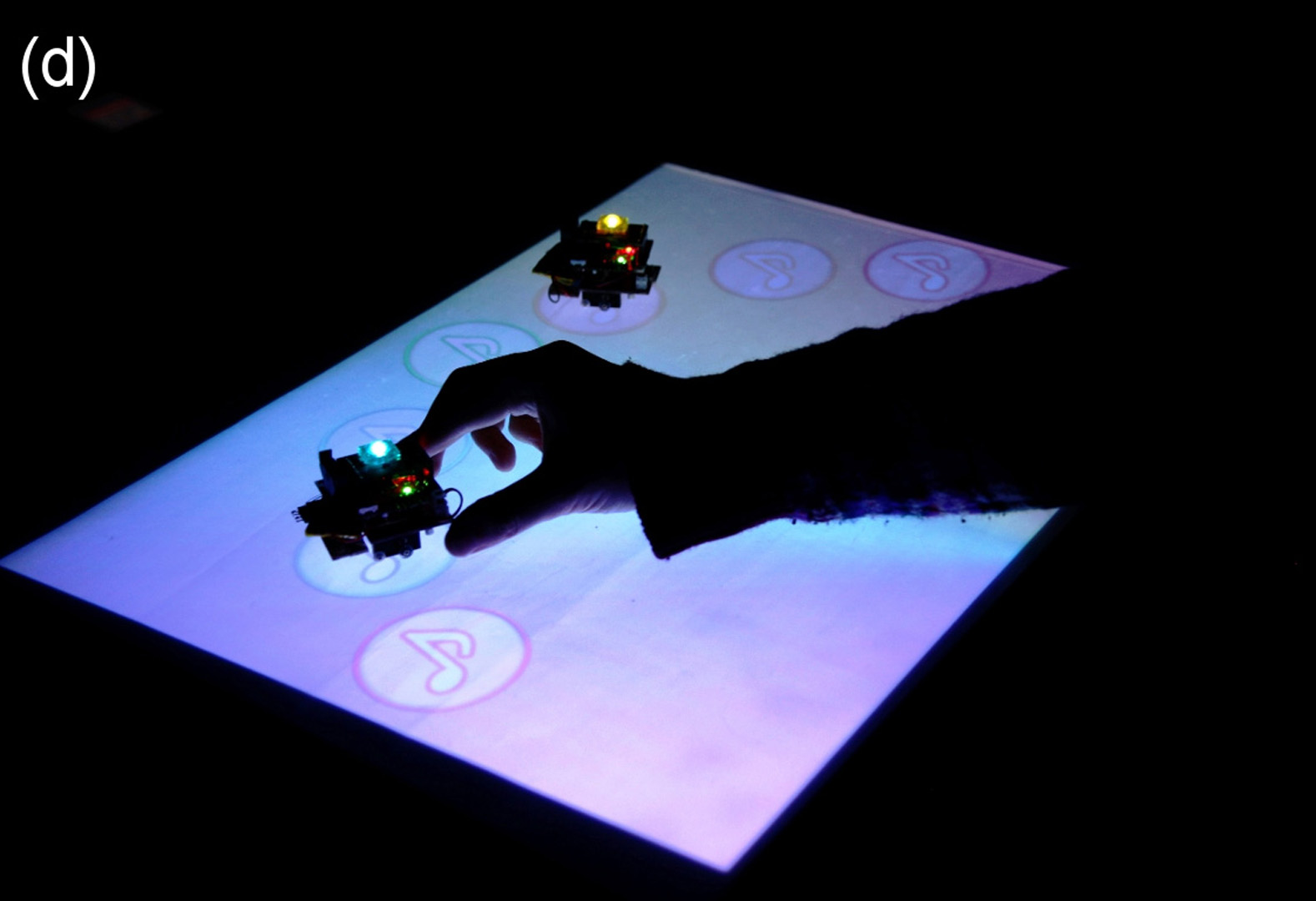
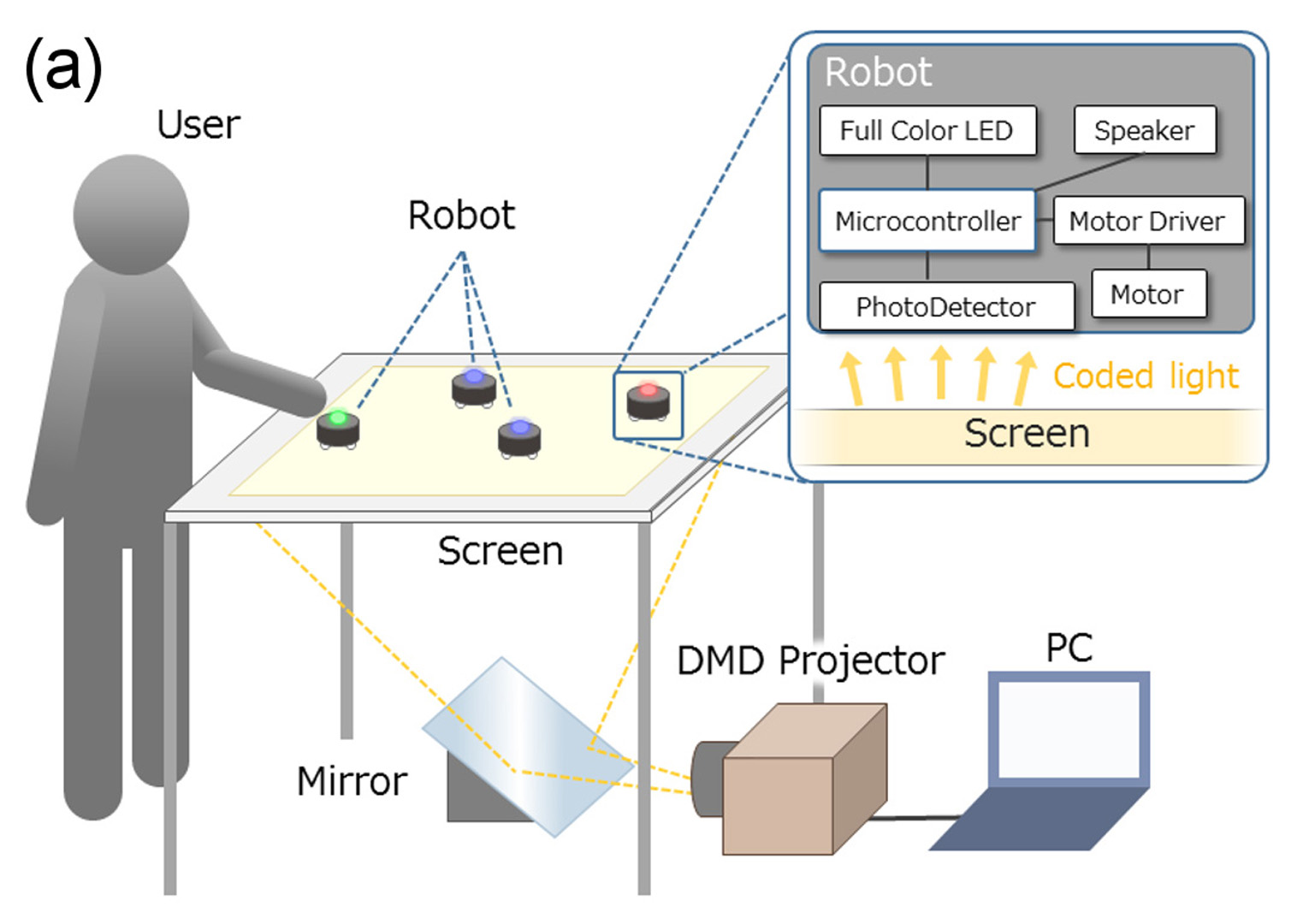
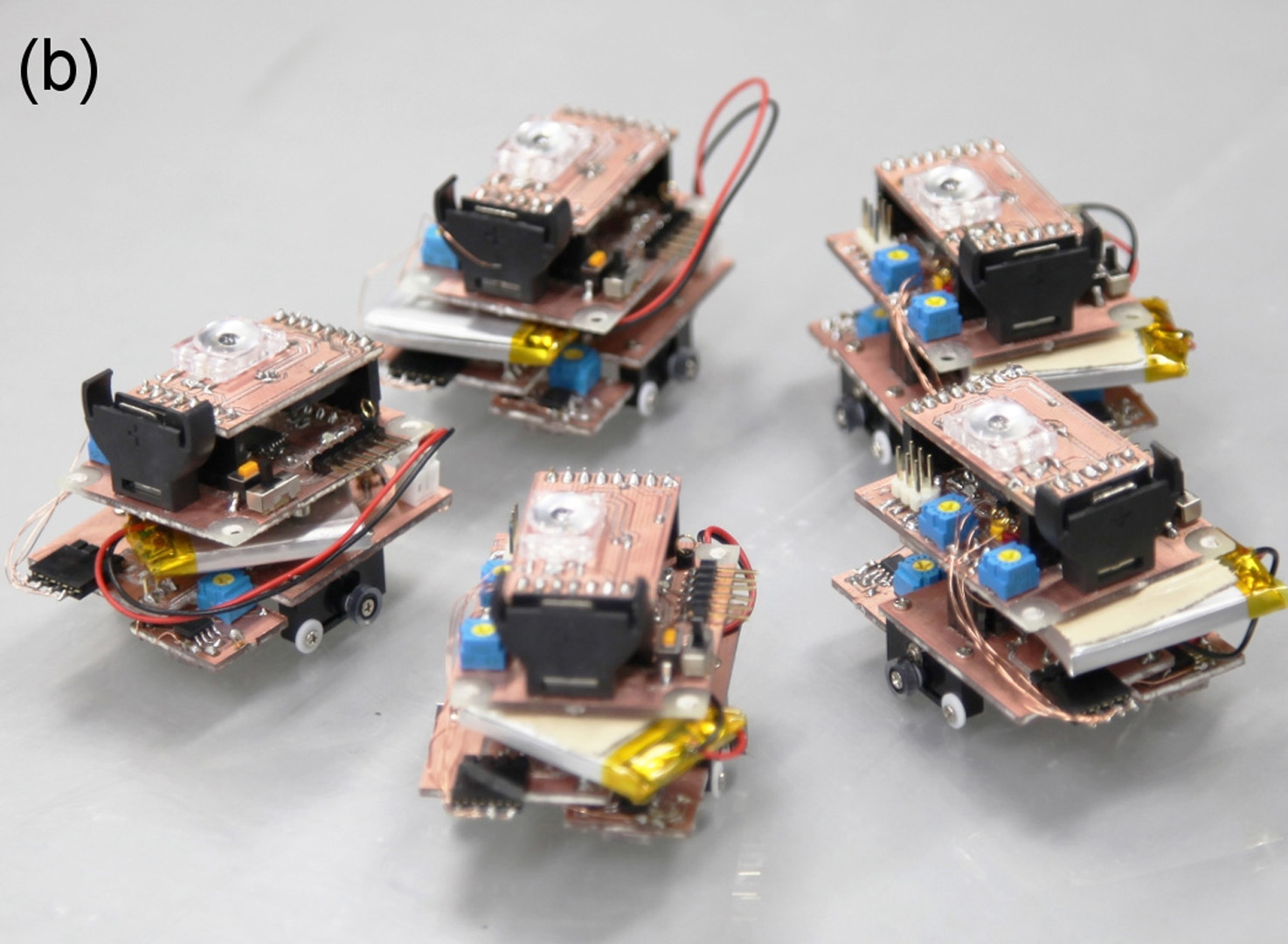
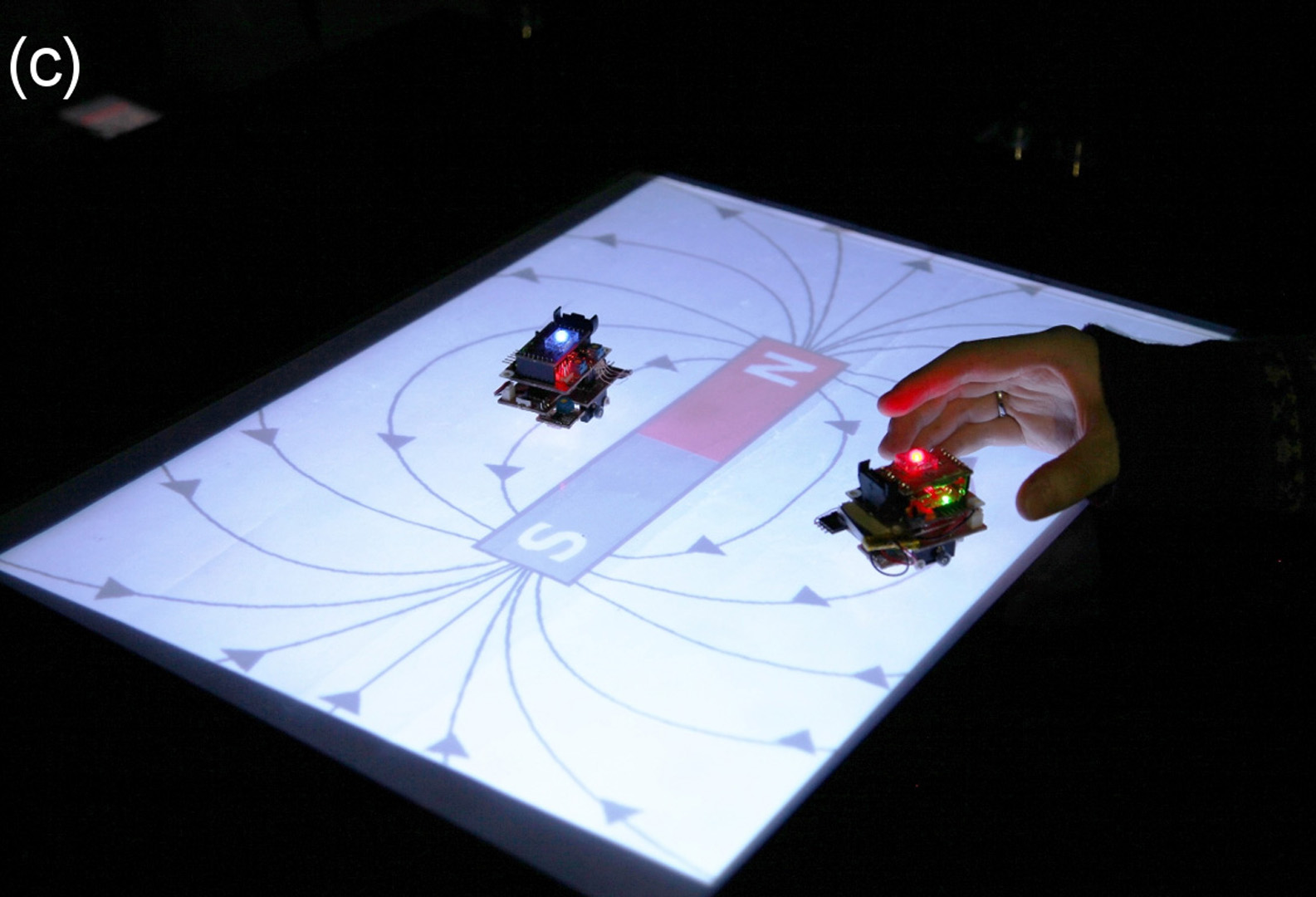
Forming images by using a swarm of mobile robots has emerged as a new platform for computer entertainment. Each robot has colored lighting, and the swarm represents various abstract patterns by using the lighting and the locomotion.
The aim of our research is to create a novel display field named “ Phygital Field, ”which integrates the physical world created by robot swarms and the digital world produced by a graphical display. To integrate them, we used a pixel-level visible light communication (PVLC) projector [Kimura et al. 2008], which can superimpose data patterns on pixels by human-imperceptible high speed flicker. This data patterns contains coordinates, control instructions, and more types of information that you want to program. By combining a swarm of robots and the graphical display, each type of image can be augmented.
So far, several types of systems for the symbiosis of robots and computer graphics have been proposed [Sugimoto et al. 2005]. Compared with these works, Phygital Field has three technical innovations: an initialization-free and marker-free display method, the simplicity of the total system, customizable data transmission.
Additional Images:
-

- 2015 Posters: Hiraki_Phygital Field: Integrated Field with Visible Images and Robot Swarm Controlled by Invisible Images