
“Motion-guided mechanical toy modeling” by Zhu, Xu, Snyder, Liu, Wang, et al. …
Conference:
Type(s):
Title:
- Motion-guided mechanical toy modeling
Session/Category Title:
- Physical Models
Presenter(s)/Author(s):
Abstract:
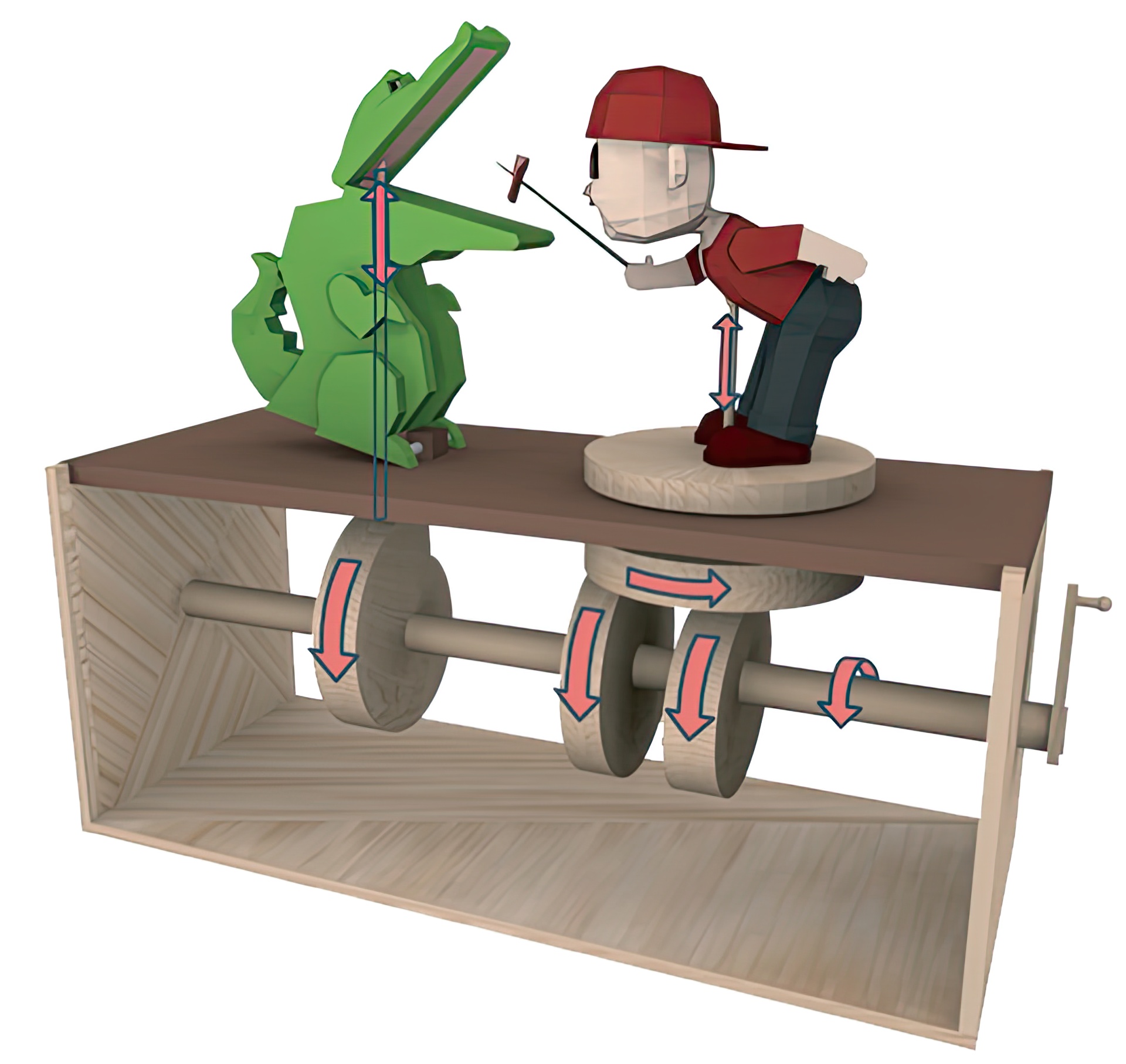
We introduce a new method to synthesize mechanical toys solely from the motion of their features. The designer specifies the geometry and a time-varying rotation and translation of each rigid feature component. Our algorithm automatically generates a mechanism assembly located in a box below the feature base that produces the specified motion. Parts in the assembly are selected from a parameterized set including belt-pulleys, gears, crank-sliders, quick-returns, and various cams (snail, ellipse, and double-ellipse). Positions and parameters for these parts are optimized to generate the specified motion, minimize a simple measure of complexity, and yield a well-distributed layout of parts over the driving axes. Our solution uses a special initialization procedure followed by simulated annealing to efficiently search the complex configuration space for an optimal assembly.
References:
1. Bickel, B., Bächer, M., Otaduy, M. A., Lee, H. R., Pfister, H., Gross, M., and Matusik, W. 2010. Design and fabrication of materials with desired deformation behavior. ACM Trans. Graph. 29, 4 (July), 63:1–63:10.
2. Chenney, S., and Forsyth, D. A. 2000. Sampling plausible solutions to multi-body constraint problems. In Proceedings of the 27th annual conference on Computer graphics and interactive techniques, ACM Press/Addison-Wesley Publishing Co., New York, NY, USA, SIGGRAPH ’00, 219–228.
3. Chiou, S.-J., and Sridhar, K. 1999. Automated conceptual design of mechanisms. Mechanism and Machine Theory 34, 3, 467–495.
4. Comaniciu, D., Meer, P., and Member, S. 2002. Mean shift: A robust approach toward feature space analysis. IEEE Transactions on Pattern Analysis and Machine Intelligence 24, 603–619.
5. Dong, Y., Wang, J., Pellacini, F., Tong, X., and Guo, B. 2010. Fabricating spatially-varying subsurface scattering. ACM Trans. Graph. 29, 4 (July), 62:1–62:10.
6. Finger, S., and Rinderle, J. 1989. A Transformational Approach to Mechanical Design using a Bond Graph Grammar, vol. 17. ASME, 107–116.
7. Frost, R. 2007. Making Mad Toys & Mechanical Marvels in Wood. Sterling.
8. Gao, X., and Chou, S. 1998. Solving geometric constraint systems. ii. a symbolic approach and decision of rc-constructibility. Computer-Aided Design 30, 115–122.
9. Gottschalk, S., Lin, M. C., and Manocha, D. 1996. Obbtree: a hierarchical structure for rapid interference detection. In Proceedings of the 23rd annual conference on Computer graphics and interactive techniques, ACM, SIGGRAPH ’96, 171–180.
10. Gui, J.-K., and Mntyl, M. 1994. Functional understanding of assembly modelling. Computer-Aided Design 26, 6, 435–451.
11. Hašan, M., Fuchs, M., Matusik, W., Pfister, H., and Rusinkiewicz, S. 2010. Physical reproduction of materials with specified subsurface scattering. ACM Trans. Graph. 29 (July), 61:1–61:10.
12. Hildebrand, K., Bickel, B., and Alexa, M. 2012. crdbrd: Shape fabrication by sliding planar slices. In to appear: Computer Graphics Forum (Eurographics 2012), vol. 31.
13. Hoover, S. P., and Rinderle, J. R. 1989. A synthesis strategy for mechanical devices. Research in Engineering Design 1, 87–103.
14. Kim, J., Kim, K., Choi, K., and Lee, J. 2000. Solving 3d geometric constraints for assembly modelling. The International Journal of Advanced Manufacturing Technology 16, 843–849. 10.1007/s001700070019.
15. Kondo, K. 1992. Algebraic method for manipulation of dimensional relationships in geometric models. Computer-Aided Design 24, 3, 141–147.
16. Lau, M., Ohgawara, A., Mitani, J., and Igarashi, T. 2011. Converting 3d furniture models to fabricatable parts and connectors. ACM Trans. Graph. 30, 4 (Aug.), 85:1–85:6.
17. Li, Y.-T., Hu, S.-M., and Sun, J.-G. 2002. A constructive approach to solving 3-d geometric constraint systems using dependence analysis. Computer-Aided Design 30, 3, 97–108.
18. McCrae, J., Singh, K., and Mitra, N. J. 2011. Slices: a shape-proxy based on planar sections. ACM Trans. Graph. 30, 6 (Dec.), 168:1–168:12.
19. Merrell, P., Schkufza, E., and Koltun, V. 2010. Computer-generated residential building layouts. ACM Trans. Graph. 29 (December), 181:1–181:12.
20. Merrell, P., Schkufza, E., Li, Z., Agrawala, M., and Koltun, V. 2011. Interactive furniture layout using interior design guidelines. ACM Trans. Graph. 30 (Aug.), 87:1–87:10.
21. Mitra, N. J., Yang, Y.-L., Yan, D.-M., Li, W., and Agrawala, M. 2010. Illustrating how mechanical assemblies work. ACM Trans. Graph. 29 (July), 58:1–58:12.
22. Mori, Y., and Igarashi, T. 2007. Plushie: an interactive design system for plush toys. ACM Trans. Graph. 26, 3 (July).
23. Neufeld, L. 2003. Making Toys That Teach: With Step-by-Step Instructions and Plans. Taunton Press.
24. Peng, X., Lee, K., and Chen, L. 2006. A geometric constraint solver for 3-d assembly modeling. The International Journal of Advanced Manufacturing Technology 28, 561–570. 10.1007/s00170-004-2391-1.
25. Peppe, R. 2005. Making Mechanical Toys. Crowood Press.
26. Roy, U., Pramanik, N., Sudarsan, R., Sriram, R., and Lyons, K. 2001. Function-to-form mapping: model, representation and applications in design synthesis. Computer-Aided Design 33, 10, 699–719.
27. Stava, O., Vanek, J., Carr, N., and Mech, R. 2012. Stress relief: Improving structural strength of 3d printable objects. In to appear: Proceedings of SIGGRAPH 2012.
28. Talton, J. O., Lou, Y., Lesser, S., Duke, J., Měch, R., and Koltun, V. 2011. Metropolis procedural modeling. ACM Trans. Graph. 30 (Apr.), 11:1–11:14.
29. Tierney, L., and Mira, A. 1999. Some adaptive monte carlo methods for bayesian inference. Statistics in Medicine 18, 2507–2515.
30. Uicker, J. 2010. Theory of Machines and Mechanisms. Oxford University Press.
31. Veach, E., and Guibas, L. J. 1997. Metropolis light transport. In Proceedings of the 24th annual conference on Computer graphics and interactive techniques, ACM Press/Addison-Wesley Publishing Co., New York, NY, USA, SIGGRAPH ’97, 65–76.
32. Verroust, A., Schonek, F., and Roller, D. 1992. Rule-oriented method for parameterized computer-aided design. Computer-Aided Design 24, 10, 531–540.
33. Wampler, K., and Popović, Z. 2009. Optimal gait and form for animal locomotion. ACM Trans. Graph. 28 (July), 60:1–60:8.
34. Wampler, II, C. W. 1986. Manipulator inverse kinematic solutions based on vector formulations and damped least-squares methods. IEEE Trans. Syst. Man Cybern. 16 (January), 93–101.
35. Wang, J. M., Fleet, D. J., and Hertzmann, A. 2009. Optimizing walking controllers. ACM Trans. Graph. 28 (December), 168:1–168:8.
36. Xin, S., Lai, C.-F., Fu, C.-W., Wong, T.-T., He, Y., and Cohen-Or, D. 2011. Making burr puzzles from 3d models. ACM Trans. Graph. 30, 4 (Aug.), 97:1–97:8.
37. Xu, W., Wang, J., Yin, K., Zhou, K., van de Panne, M., Chen, F., and Guo, B. 2009. Joint-aware manipulation of deformable models. ACM Trans. Graph. 28 (July), 35:1–35:9.
38. Yu, L.-F., Yeung, S.-K., Tang, C.-K., Terzopoulos, D., Chan, T. F., and Osher, S. J. 2011. Make it home: automatic optimization of furniture arrangement. ACM Trans. Graph. 30 (Aug.), 86:1–86:12.