
“Interference-aware geometric modeling”
Conference:
Type(s):
Title:
- Interference-aware geometric modeling
Session/Category Title:
- Contact, Collision and Congestion
Presenter(s)/Author(s):
Abstract:
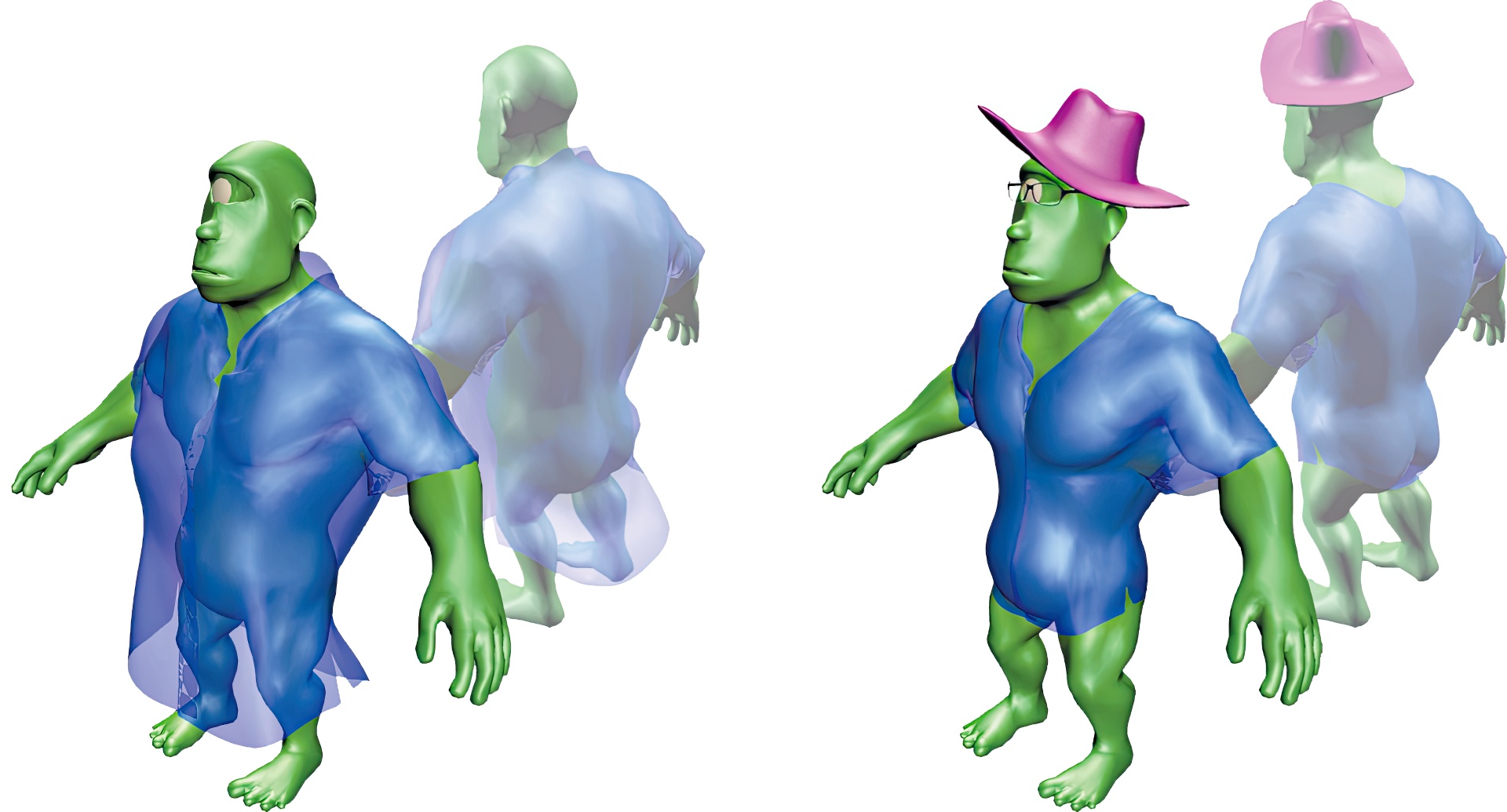
While often a requirement for geometric models, there has been little research in resolving the interaction of deforming surfaces during real-time modeling sessions. To address this important topic, we introduce an interference algorithm specifically designed for the domain of geometric modeling. This algorithm is general, easily working within existing modeling paradigms to maintain their important properties. Our algorithm is fast, and is able to maintain interactive rates on complex deforming meshes of over 75K faces, while robustly removing intersections. Lastly, our method is controllable, allowing fine-tuning to meet the specific needs of the user. This includes support for minimum separation between surfaces and control over the relative rigidity of interacting objects.
References:
1. Aldrich, G., Pinskiy, D., and Hamann, B. 2011. Collision-driven volumetric deformation on the GPU. Eurographics 2011.Google Scholar
2. Allard, J., Faure, F., Courtecuisse, H., Falipou, F., Duriez, C., and Kry, P. G. 2010. Volume contact constraints at arbitrary resolution. ACM Trans. Graph. 29 (July), 82:1–82:10. Google ScholarDigital Library
3. Angelidis, A., Cani, M., Wyvill, G., and King, S. 2006. Swirling-sweepers: Constant-volume modeling. Graphical Models 68, 4, 324–332. Google ScholarDigital Library
4. Au, O. K.-C., Tai, C.-L., Chu, H.-K., Cohen-Or, D., and Lee, T.-Y. 2008. Skeleton extraction by mesh contraction. ACM Trans. Graph. 27 (August), 44:1–44:10. Google ScholarDigital Library
5. Baraff, D. 1989. Analytical methods for dynamic simulation of non-penetrating rigid bodies. In Proc. SIGGRAPH, 223–232. Google ScholarDigital Library
6. Baraff, D. 1994. Fast contact force computation for nonpenetrating rigid bodies. In Proc. SIGGRAPH, 23–34. Google ScholarDigital Library
7. Barbič, J., and James, D. 2008. Six-dof haptic rendering of contact between geometrically complex reduced deformable models. IEEE Transactions on Haptics, 39–52. Google ScholarDigital Library
8. Botsch, M., and Sorkine, O. 2007. On linear variational surface deformation methods. IEEE Transactions on Visualization and Computer Graphics, 213–230. Google ScholarDigital Library
9. Botsch, M., Pauly, M., Gross, M., and Kobbelt, L. 2006. Primo: coupled prisms for intuitive surface modeling. In Proceedings of the fourth Eurographics symposium on Geometry processing, Eurographics Association, 11–20. Google ScholarDigital Library
10. Boyd, S., and Vandenberghe, L. 2004. Convex Optimization. Cambridge University Press, New York, NY, USA. Google ScholarDigital Library
11. Bridson, R., Fedkiw, R., and Anderson, J. 2002. Robust treatment of collisions, contact and friction for cloth animation. ACM Trans. Graph. 21, 3, 594–603. Google ScholarDigital Library
12. Catmull, E., and Clark, J. 1978. Recursively generated B-spline surfaces on arbitrary topological meshes. Computer-Aided Design 10, 6, 350–355.Google ScholarCross Ref
13. Cottle, R., Pang, J., and Stone, R. 1993. The Linear Complementarity Problem. Academic Press, New York, NY.Google Scholar
14. Ericson, C. 2004. Real-Time Collision Detection (The Morgan Kaufmann Series in Interactive 3D Technology). Morgan Kaufmann, December. Google ScholarDigital Library
15. Faure, F., Barbier, S., Allard, J., and Falipou, F. 2008. Image-based collision detection and response between arbitrary volumetric objects. In ACM Siggraph/Eurographics Symposium on Computer Animation, SCA 2008, July, 2008. Google ScholarDigital Library
16. Gain, J., and Dodgson, N. 2001. Preventing self-intersection under free-form deformation. IEEE Transactions on Visualization and Computer Graphics, 289–298. Google ScholarDigital Library
17. Harmon, D., Vouga, E., Tamstorf, R., and Grinspun, E. 2008. Robust treatment of simultaneous collisions. ACM Trans. Graph. 27, 3, 23:1–23:4. Google ScholarDigital Library
18. Harmon, D., Vouga, E., Smith, B., Tamstorf, R., and Grinspun, E. 2009. Asynchronous contact mechanics. ACM Trans. Graph. 28, 87:1–87:12. Google ScholarDigital Library
19. Heidelberger, B., Teschner, M., and Gross, M. 2004. Detection of collisions and self-collisions using image-space techniques. Journal of WSCG 12, 3, 145–152.Google Scholar
20. Kaufman, D. M., Edmunds, T., and Pai, D. K. 2005. Fast frictional dynamics for rigid bodies. ACM Trans. Graph. 24, 946–956. Google ScholarDigital Library
21. Lötstedt, P. 1984. Numerical simulation of time-dependent contact and friction problems in rigid body mechanics. SIAM Journal on Scientific and Statistical Computing 5, 370–384.Google ScholarCross Ref
22. McNeely, W. A., Puterbaugh, K. D., and Troy, J. J. 1999. Six degree-of-freedom haptic rendering using voxel sampling. SIGGRAPH ’99, 401–408. Google ScholarDigital Library
23. Mirtich, B., and Canny, J. 1995. Impulse-based dynamic simulation. In WAFR: Proceedings of the workshop on Algorithmic foundations of robotics, A. K. Peters, Ltd., Natick, MA, USA, 407–418. Google ScholarDigital Library
24. Moore, M., and Wilhelms, J. 1988. Collision detection and response for computer animation. ACM, New York, NY, USA, SIGGRAPH ’88, 289–298. Google ScholarDigital Library
25. Provot, X. 1997. Collision and self-collision handling in cloth model dedicated to design garments. In Proc. Computer Animation and Simulation, Springer Verlag, 177–189.Google Scholar
26. Sederberg, T. W., and Parry, S. R. 1986. Free-form deformation of solid geometric models. ACM, New York, NY, USA, SIGGRAPH ’86, 151–160. Google ScholarDigital Library
27. Selle, A., Lentine, M., and Fedkiw, R. 2008. Amass spring model for hair simulation. ACM Trans. Graph. 27, 3, 64–64. Google ScholarDigital Library
28. Snyder, J. M. 1995. An interactive tool for placing curved surfaces without interpenetration. ACM, New York, NY, USA, SIGGRAPH’95, 209–218. Google ScholarDigital Library
29. Sorkine, O., and Alexa, M. 2007. As-rigid-as-possible surface modeling. In Proc. Symposium on Geometry Processing, 109–116. Google ScholarDigital Library
30. Sorkine, O., Cohen-Or, D., Lipman, Y, Alexa, M., Rössl, C., and Seidel, H. 2004. Laplacian surface editing. In Proc. Symposium on Geometry processing, 175–184. Google ScholarDigital Library
31. Stewart, D., and Trinkle, J. 1996. An implicit time-stepping scheme for rigid body dynamics with inelastic collisions and coulomb friction. Intl. Journal for Numerical Methods in Engineering 39, 2673–2691.Google ScholarCross Ref
32. Terzopoulos, D., Platt, J., Barr, A., and Fleischer, K. 1987. Elastically deformable models. ACM, New York, NY, USA, SIGGRAPH ’87, 205–214. Google ScholarDigital Library
33. Teschner, M., Heidelberger, B., Müller, M., Pomeranets, D., and Gross, M. 2003. Optimized spatial hashing for collision detection of deformable objects. In Proc. VMV, 47–54.Google Scholar
34. Teschner, M., Kimmerle, S., Zachmann, G., Heidelberger, B., Raghupathi, L., Fuhrmann, A., Cani, M.-P., Faure, F., Magnenat-Thalmann, N., and Strasser, W. 2004. State-of-the-art report: Collision detection for deformable objects. In Proc. Eurographics, 119–139.Google Scholar
35. UNC, 2010. Self-ccd: Continuous collision detection for deforming objects.Google Scholar
36. Von Funck, W., Theisel, H., and Seidel, H. 2006. Vector field based shape deformations. ACM Trans. Graph. 25, 3, 1118–1125. Google ScholarDigital Library
37. Wriggers, P., and Laursen, T. A. 2007. Computational contact mechanics, vol. 498 of CISM courses and lectures. Springer.Google Scholar