
“Hand-Object Interaction Controller (HOIC): Deep Reinforcement Learning for Reconstructing Interactions With Physics”
Conference:
Type(s):
Title:
- Hand-Object Interaction Controller (HOIC): Deep Reinforcement Learning for Reconstructing Interactions With Physics
Presenter(s)/Author(s):
Abstract:
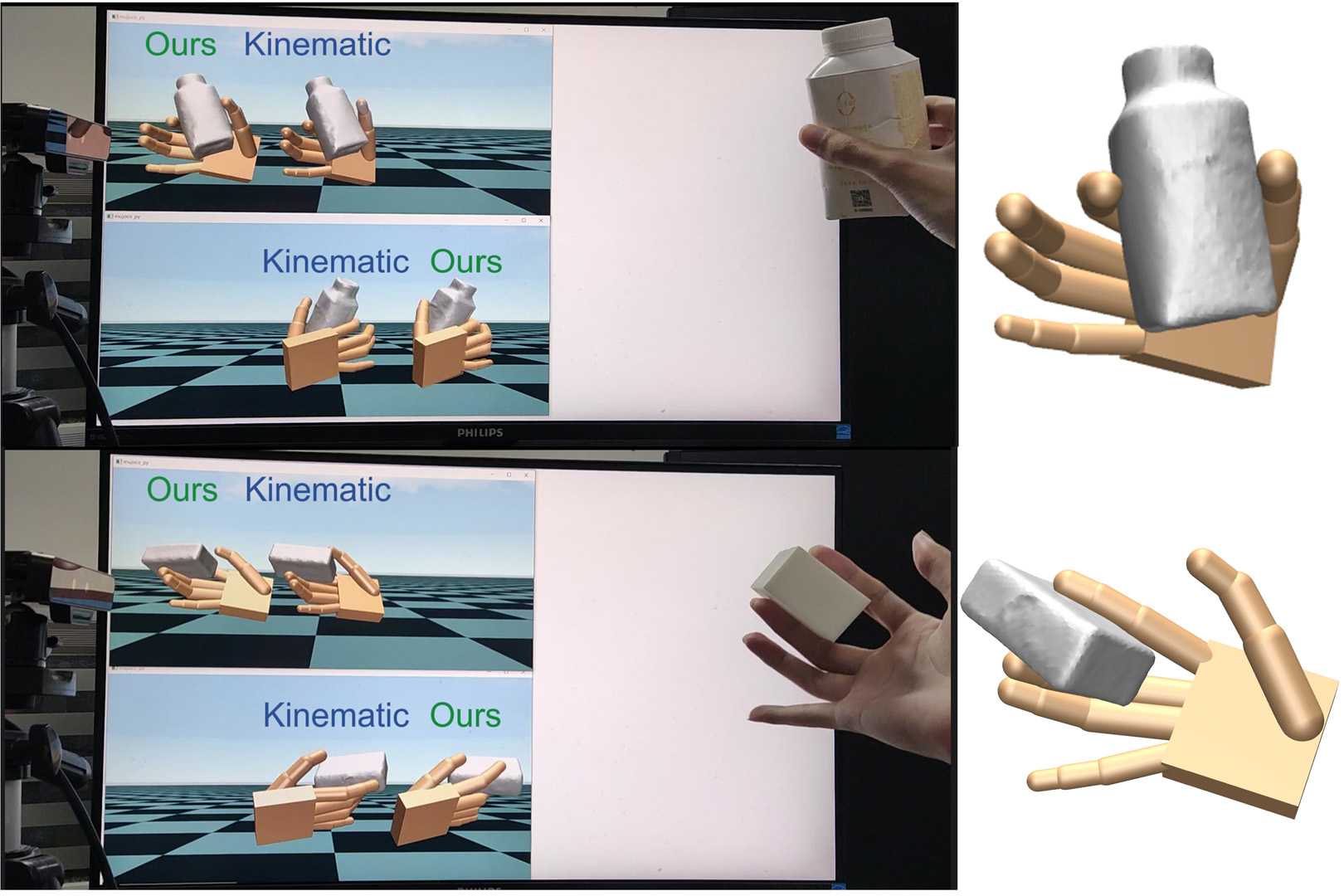
This paper introduces a physics-based hand-object interaction reconstruction system by leveraging imitation learning. A novel object compensation control technique is proposed to upgrade the simple point contact model to a more physical-plausible surface contact model, which improves the training stability and reconstruction quality.
References:
[1]
Sheldon Andrews, Kenny Erleben, and Zachary Ferguson. 2022. Contact and friction simulation for computer graphics. In ACM SIGGRAPH 2022 Courses. 1?172.
[2]
OpenAI: Marcin Andrychowicz, Bowen Baker, Maciek Chociej, Rafal Jozefowicz, Bob McGrew, Jakub Pachocki, Arthur Petron, Matthias Plappert, Glenn Powell, Alex Ray, 2020. Learning dexterous in-hand manipulation. The International Journal of Robotics Research 39, 1 (2020), 3?20.
[3]
Luca Ballan, Aparna Taneja, J?rgen Gall, Luc Van Gool, and Marc Pollefeys. 2012. Motion capture of hands in action using discriminative salient points. In European Conference on Computer Vision. Springer, 640?653.
[4]
Samarth Brahmbhatt, Chengcheng Tang, Christopher D. Twigg, Charles C. Kemp, and James Hays. 2020. ContactPose: A Dataset of Grasps with Object Contact and Hand Pose. In The European Conference on Computer Vision (ECCV).
[5]
St?phane Caron, Quang-Cuong Pham, and Yoshihiko Nakamura. 2015. Stability of surface contacts for humanoid robots: Closed-form formulae of the contact wrench cone for rectangular support areas. In 2015 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 5107?5112.
[6]
Yu-Wei Chao, Wei Yang, Yu Xiang, Pavlo Molchanov, Ankur Handa, Jonathan Tremblay, Yashraj S. Narang, Karl Van Wyk, Umar Iqbal, Stan Birchfield, Jan Kautz, and Dieter Fox. 2021. DexYCB: A Benchmark for Capturing Hand Grasping of Objects. In IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).
[7]
Jiayi Chen, Mi Yan, Jiazhao Zhang, Yinzhen Xu, Xiaolong Li, Yijia Weng, Li Yi, Shuran Song, and He Wang. 2023c. Tracking and reconstructing hand object interactions from point cloud sequences in the wild. In Proceedings of the AAAI Conference on Artificial Intelligence, Vol. 37. 304?312.
[8]
Sirui Chen, Albert Wu, and C Karen Liu. 2023b. Synthesizing Dexterous Nonprehensile Pregrasp for Ungraspable Objects. In ACM SIGGRAPH 2023 Conference Proceedings. 1?10.
[9]
Tao Chen, Jie Xu, and Pulkit Agrawal. 2022b. A system for general in-hand object re-orientation. In Conference on Robot Learning. PMLR, 297?307.
[10]
Yuanpei Chen, Tianhao Wu, Shengjie Wang, Xidong Feng, Jiechuan Jiang, Zongqing Lu, Stephen McAleer, Hao Dong, Song-Chun Zhu, and Yaodong Yang. 2022a. Towards human-level bimanual dexterous manipulation with reinforcement learning. Advances in Neural Information Processing Systems 35 (2022), 5150?5163.
[11]
Zerui Chen, Shizhe Chen, Cordelia Schmid, and Ivan Laptev. 2023a. gSDF: Geometry-Driven Signed Distance Functions for 3D Hand-Object Reconstruction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 12890?12900.
[12]
Sammy Christen, Muhammed Kocabas, Emre Aksan, Jemin Hwangbo, Jie Song, and Otmar Hilliges. 2022. D-Grasp: Physically Plausible Dynamic Grasp Synthesis for Hand-Object Interactions. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 20577?20586.
[13]
Zicong Fan, Omid Taheri, Dimitrios Tzionas, Muhammed Kocabas, Manuel Kaufmann, Michael J. Black, and Otmar Hilliges. 2023. ARCTIC: A Dataset for Dexterous Bimanual Hand-Object Manipulation. In Proceedings IEEE Conference on Computer Vision and Pattern Recognition (CVPR).
[14]
Levi Fussell, Kevin Bergamin, and Daniel Holden. 2021. Supertrack: Motion tracking for physically simulated characters using supervised learning. ACM Transactions on Graphics (TOG) 40, 6 (2021), 1?13.
[15]
Guillermo Garcia-Hernando, Shanxin Yuan, Seungryul Baek, and Tae-Kyun Kim. 2018. First-Person Hand Action Benchmark with RGB-D Videos and 3D Hand Pose Annotations. In Proceedings of Computer Vision and Pattern Recognition (CVPR).
[16]
Shreyas Hampali, Mahdi Rad, Markus Oberweger, and Vincent Lepetit. 2020. HOnnotate: A method for 3D Annotation of Hand and Object Poses. In CVPR.
[17]
Yana Hasson, Gul Varol, Dimitrios Tzionas, Igor Kalevatykh, Michael J Black, Ivan Laptev, and Cordelia Schmid. 2019. Learning joint reconstruction of hands and manipulated objects. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 11807?11816.
[18]
Jonathan Ho and Stefano Ermon. 2016. Generative adversarial imitation learning. Advances in neural information processing systems 29 (2016).
[19]
Haoyu Hu, Xinyu Yi, Hao Zhang, Jun-Hai Yong, and Feng Xu. 2022. Physical interaction: Reconstructing hand-object interactions with physics. In SIGGRAPH Asia 2022 Conference Papers. 1?9.
[20]
Sumit Jain and C Karen Liu. 2011. Controlling physics-based characters using soft contacts. In Proceedings of the 2011 SIGGRAPH Asia Conference. 1?10.
[21]
Korrawe Karunratanakul, Jinlong Yang, Yan Zhang, Michael J Black, Krikamol Muandet, and Siyu Tang. 2020. Grasping field: Learning implicit representations for human grasps. In 2020 International Conference on 3D Vision (3DV). IEEE, 333?344.
[22]
Paul G Kry and Dinesh K Pai. 2006. Interaction capture and synthesis. ACM Transactions on Graphics (TOG) 25, 3 (2006), 872?880.
[23]
Nikolaos Kyriazis and Antonis Argyros. 2013. Physically plausible 3d scene : The single actor hypothesis. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 9?16.
[24]
C Karen Liu. 2009. Dextrous manipulation from a grasping pose. In ACM SIGGRAPH 2009 papers. 1?6.
[25]
Libin Liu and Jessica Hodgins. 2018. Learning basketball dribbling skills using trajectory optimization and deep reinforcement learning. ACM Transactions on Graphics (TOG) 37, 4 (2018), 1?14.
[26]
YuXuan Liu, Abhishek Gupta, Pieter Abbeel, and Sergey Levine. 2018. Imitation from observation: Learning to imitate behaviors from raw video via context translation. In 2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 1118?1125.
[27]
Stefan Luding. 2008. Cohesive, frictional powders: contact models for tension. Granular matter 10, 4 (2008), 235?246.
[28]
Kevin M Lynch and Frank C Park. 2017. Modern robotics. Cambridge University Press.
[29]
Igor Mordatch, Zoran Popovi?, and Emanuel Todorov. 2012. Contact-invariant optimization for hand manipulation. In Proceedings of the ACM SIGGRAPH/Eurographics symposium on computer animation. 137?144.
[30]
Iason Oikonomidis, Nikolaos Kyriazis, and Antonis A Argyros. 2011. Full dof tracking of a hand interacting with an object by modeling occlusions and physical constraints. In 2011 International Conference on Computer Vision. IEEE, 2088?2095.
[31]
Xue Bin Peng, Pieter Abbeel, Sergey Levine, and Michiel Van de Panne. 2018. Deepmimic: Example-guided deep reinforcement learning of physics-based character skills. ACM Transactions On Graphics (TOG) 37, 4 (2018), 1?14.
[32]
Xue Bin Peng, Yunrong Guo, Lina Halper, Sergey Levine, and Sanja Fidler. 2022. Ase: Large-scale reusable adversarial skill embeddings for physically simulated characters. ACM Transactions On Graphics (TOG) 41, 4 (2022), 1?17.
[33]
Xue Bin Peng, Ze Ma, Pieter Abbeel, Sergey Levine, and Angjoo Kanazawa. 2021. Amp: Adversarial motion priors for stylized physics-based character control. ACM Transactions on Graphics (ToG) 40, 4 (2021), 1?20.
[34]
Yuzhe Qin, Yueh-Hua Wu, Shaowei Liu, Hanwen Jiang, Ruihan Yang, Yang Fu, and Xiaolong Wang. 2022. Dexmv: Imitation learning for dexterous manipulation from human videos. In European Conference on Computer Vision. Springer, 570?587.
[35]
Ilija Radosavovic, Xiaolong Wang, Lerrel Pinto, and Jitendra Malik. 2021. State-only imitation learning for dexterous manipulation. In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 7865?7871.
[36]
Aravind Rajeswaran, Vikash Kumar, Abhishek Gupta, Giulia Vezzani, John Schulman, Emanuel Todorov, and Sergey Levine. 2017. Learning complex dexterous manipulation with deep reinforcement learning and demonstrations. arXiv preprint arXiv:1709.10087 (2017).
[37]
Tanner Schmidt, Katharina Hertkorn, Richard Newcombe, Zoltan Marton, Michael Suppa, and Dieter Fox. 2015. Depth-based tracking with physical constraints for robot manipulation. In 2015 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 119?126.
[38]
John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. 2017. Proximal policy optimization algorithms. arXiv preprint arXiv:1707.06347 (2017).
[39]
Pierre Sermanet, Corey Lynch, Yevgen Chebotar, Jasmine Hsu, Eric Jang, Stefan Schaal, Sergey Levine, and Google Brain. 2018. Time-contrastive networks: Self-supervised learning from video. In 2018 IEEE international conference on robotics and automation (ICRA). IEEE, 1134?1141.
[40]
Soshi Shimada, Vladislav Golyanik, Weipeng Xu, and Christian Theobalt. 2020. PhysCap: physically plausible monocular 3D motion capture in real time. ACM Transactions on Graphics 39 (dec 2020).
[41]
Srinath Sridhar, Franziska Mueller, Michael Zollh?fer, Dan Casas, Antti Oulasvirta, and Christian Theobalt. 2016. Real-time joint tracking of a hand manipulating an object from rgb-d input. In European Conference on Computer Vision. Springer, 294?310.
[42]
Richard S Sutton, Andrew G Barto, 1998. Introduction to reinforcement learning. Vol. 135. MIT press Cambridge.
[43]
Bugra Tekin, Federica Bogo, and Marc Pollefeys. 2019. H+ o: Unified egocentric recognition of 3d hand-object poses and interactions. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 4511?4520.
[44]
Chen Tessler, Yoni Kasten, Yunrong Guo, Shie Mannor, Gal Chechik, and Xue Bin Peng. 2023. Calm: Conditional adversarial latent models for directable virtual characters. In ACM SIGGRAPH 2023 Conference Proceedings. 1?9.
[45]
Emanuel Todorov, Tom Erez, and Yuval Tassa. 2012. Mujoco: A physics engine for model-based control. In 2012 IEEE/RSJ international conference on intelligent robots and systems. IEEE, 5026?5033.
[46]
Aggeliki Tsoli and Antonis A Argyros. 2018. Joint 3D tracking of a deformable object in interaction with a hand. In Proceedings of the European Conference on Computer Vision (ECCV). 484?500.
[47]
Dimitrios Tzionas, Luca Ballan, Abhilash Srikantha, Pablo Aponte, Marc Pollefeys, and Juergen Gall. 2016. Capturing hands in action using discriminative salient points and physics simulation. International Journal of Computer Vision 118, 2 (2016), 172?193.
[48]
Yangang Wang, Jianyuan Min, Jianjie Zhang, Yebin Liu, Feng Xu, Qionghai Dai, and Jinxiang Chai. 2013. Video-based hand manipulation capture through composite motion control. ACM Transactions on Graphics (TOG) 32, 4 (2013), 1?14.
[49]
Xinyue Wei, Minghua Liu, Zhan Ling, and Hao Su. 2022. Approximate convex decomposition for 3d meshes with collision-aware concavity and tree search. ACM Transactions on Graphics (TOG) 41, 4 (2022), 1?18.
[50]
Alexander Winkler, Jungdam Won, and Yuting Ye. 2022. QuestSim: Human motion tracking from sparse sensors with simulated avatars. In SIGGRAPH Asia 2022 Conference Papers. 1?8.
[51]
Albert Wu, Michelle Guo, and Karen Liu. 2023. Learning Diverse and Physically Feasible Dexterous Grasps with Generative Model and Bilevel Optimization. In Conference on Robot Learning. PMLR, 1938?1948.
[52]
Kevin Xie, Tingwu Wang, Umar Iqbal, Yunrong Guo, Sanja Fidler, and Florian Shkurti. 2021. Physics-based human motion estimation and synthesis from videos. In Proceedings of the IEEE/CVF International Conference on Computer Vision. 11532?11541.
[53]
Zeshi Yang, Kangkang Yin, and Libin Liu. 2022. Learning to use chopsticks in diverse gripping styles. ACM Transactions on Graphics (TOG) 41, 4 (2022), 1?17.
[54]
Yuting Ye and C Karen Liu. 2012. Synthesis of detailed hand manipulations using contact sampling. ACM Transactions on Graphics (ToG) 31, 4 (2012), 1?10.
[55]
Xinyu Yi, Yuxiao Zhou, Marc Habermann, Soshi Shimada, Vladislav Golyanik, Christian Theobalt, and Feng Xu. 2022. Physical Inertial Poser (PIP): Physics-aware Real-time Human Motion Tracking from Sparse Inertial Sensors. In IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).
[56]
Ye Yuan and Kris Kitani. 2020. Residual force control for agile human behavior imitation and extended motion synthesis. Advances in Neural Information Processing Systems 33 (2020), 21763?21774.
[57]
Ye Yuan, Shih-En Wei, Tomas Simon, Kris Kitani, and Jason Saragih. 2021. Simpoe: Simulated character control for 3d human pose estimation. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 7159?7169.
[58]
He Zhang, Yuting Ye, Takaaki Shiratori, and Taku Komura. 2021a. Manipnet: neural manipulation synthesis with a hand-object spatial representation. ACM Transactions on Graphics (ToG) 40, 4 (2021), 1?14.
[59]
Hao Zhang, Yuxiao Zhou, Yifei Tian, Jun-Hai Yong, and Feng Xu. 2021b. Single Depth View Based Real-Time Reconstruction of Hand-Object Interactions. ACM Transactions on Graphics (TOG) 40, 3 (2021), 1?12.
[60]
Zimeng Zhao, Binghui Zuo, Wei Xie, and Yangang Wang. 2022. Stability-driven contact reconstruction from monocular color images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 1643?1653.
[61]
Yu Zheng and Katsu Yamane. 2013. Human motion tracking control with strict contact force constraints for floating-base humanoid robots. In 2013 13th IEEE-RAS International Conference on Humanoid Robots (Humanoids). IEEE, 34?41.