
“Computational multicopter design” by Du, Schulz, Zhu, Bickel and Matusik
Conference:
Type(s):
Title:
- Computational multicopter design
Session/Category Title:
- Fabrication
Presenter(s)/Author(s):
Abstract:
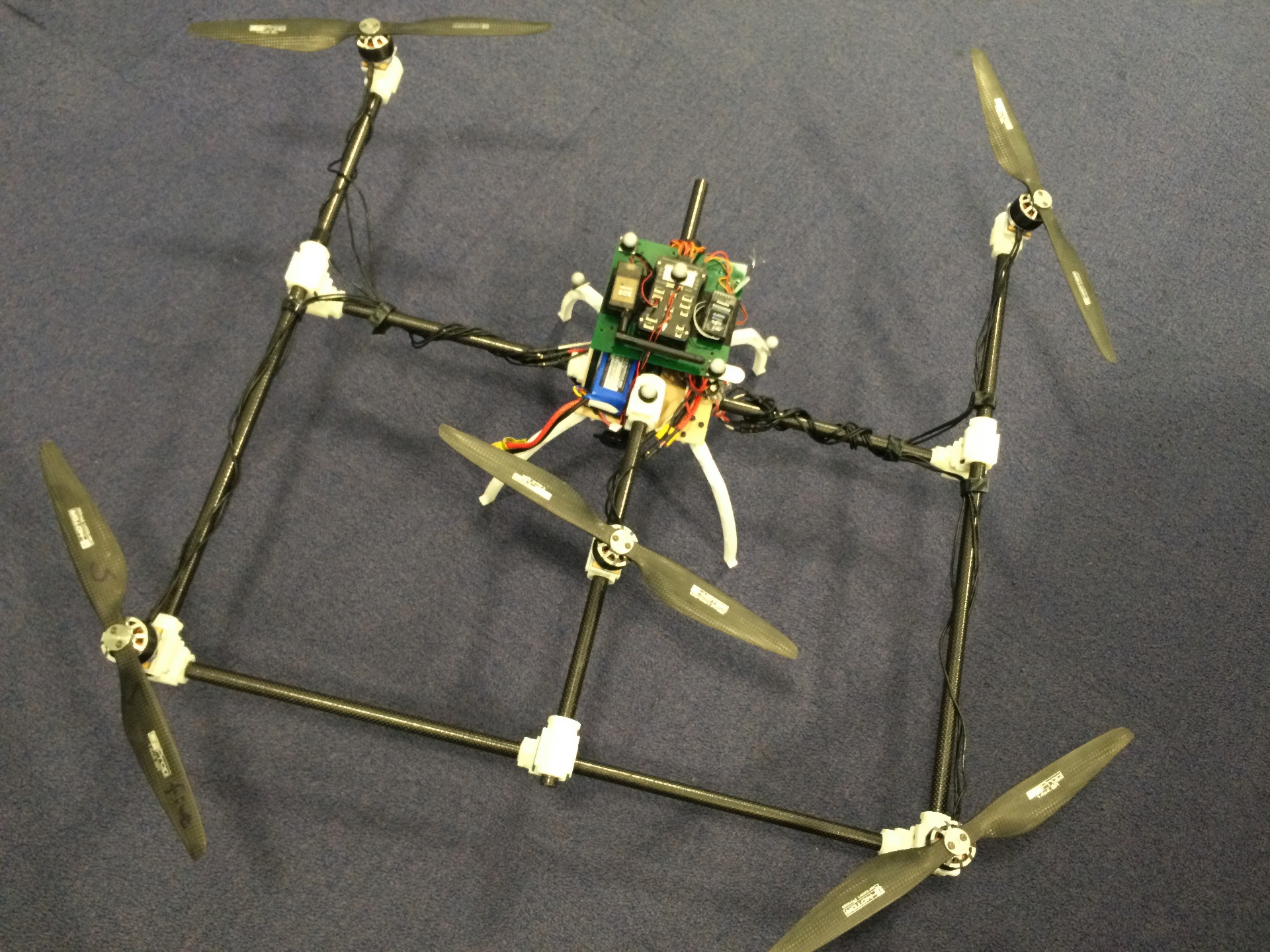
We present an interactive system for computational design, optimization, and fabrication of multicopters. Our computational approach allows non-experts to design, explore, and evaluate a wide range of different multicopters. We provide users with an intuitive interface for assembling a multicopter from a collection of components (e.g., propellers, motors, and carbon fiber rods). Our algorithm interactively optimizes shape and controller parameters of the current design to ensure its proper operation. In addition, we allow incorporating a variety of other metrics (such as payload, battery usage, size, and cost) into the design process and exploring tradeoffs between them. We show the efficacy of our method and system by designing, optimizing, fabricating, and operating multicopters with complex geometries and propeller configurations. We also demonstrate the ability of our optimization algorithm to improve the multicopter performance under different metrics.
References:
1. APM, 2015. APM autopilot suite. http://ardupilot.org.
2. Aström, K. J., and Murray, R. M. 2010. Feedback systems: an introduction for scientists and engineers. Princeton University Press.
3. Bächer, M., Whiting, E., Bickel, B., and Sorkine-Hornung, O. 2014. Spin-it: optimizing moment of inertia for spinnable objects. ACM Trans. Graph. 33, 4, (July), 96:1–96:10.
4. Bharaj, G., Coros, S., Thomaszewski, B., Tompkin, J., Bickel, B., and Pfister, H. 2015. Computational design of walking automata. In Proc. Symposium on Computer Animation, 93–100.
5. Bouabdallah, S., Noth, A., and Siegwart, R. 2004. PID vs LQ control techniques applied to an indoor micro quadrotor. In Intelligent Robots and Systems (IROS) 2004.
6. Boyd, S., and Vandenberghe, L. 2004. Convex optimization. Cambridge University Press.
7. Coros, S., Karpathy, A., Jones, B., Reveret, L., and Van De Panne, M. 2011. Locomotion skills for simulated quadrupeds. ACM Trans. Graph. 30, 4, (July), 59:1–59:12.
8. Coros, S., Thomaszewski, B., Noris, G., Sueda, S., Forberg, M., Sumner, R. W., Matusik, W., and Bickel, B. 2013. Computational design of mechanical characters. ACM Trans. Graph. 32, 4, (July), 83:1–83:12.
9. Garg, A., Sageman-Furnas, A. O., Deng, B., Yue, Y., Grinspun, E., Pauly, M., and Wardetzky, M. 2014. Wire mesh design. ACM Trans. Graph. 33, 4, (July), 66:1–66:12.
10. Grant, M., and Boyd, S. 2008. Graph implementations for nonsmooth convex programs. In Recent Advances in Learning and Control. Springer, 95–110. http://stanford.edu/~boyd/graph_dcp.html.
11. Grant, M., and Boyd, S., 2014. CVX: MATLAB software for disciplined convex programming, version 2.1. http://cvxr.com/cvx.
12. Hoffmann, G., Rajnarayan, D. G., Waslander, S. L., Dostal, D., Jang, J. S., and Tomlin, C. J. 2004. The Stanford testbed of autonomous rotorcraft for multi agent control (STARMAC). In Digital Avionics Systems Conference (DASC) 2004.
13. Hoffmann, G. M., Huang, H., Waslander, S. L., and Tomlin, C. J. 2007. Quadrotor helicopter flight dynamics and control: theory and experiment. In Proc. AIAA Guidance, Navigation, and Control Conference.
14. Jain, S., and Liu, C. K. 2009. Interactive synthesis of human-object interaction. In Proc. Symposium on Computer Animation, 47–53.
15. Joubert, N., Roberts, M., Truong, A., Berthouzoz, F., and Hanrahan, P. 2015. An interactive tool for designing quadrotor camera shots. ACM Trans. Graph. 34, 6, (November), 238:1–238:11.
16. Ju, E., Won, J., Lee, J., Choi, B., Noh, J., and Choi, M. G. 2013. Data-driven control of flapping flight. ACM Trans. Graph. 32, 5, (September), 151:1–151:12.
17. Koo, B., Li, W., Yao, J., Agrawala, M., and Mitra, N. J. 2014. Creating works-like prototypes of mechanical objects. ACM Trans. Graph. 33, 6, (November), 217:1–217:9.
18. Lau, M., Ohgawara, A., Mitani, J., and Igarashi, T. 2011. Converting 3D furniture models to fabricatable parts and connectors. ACM Trans. Graph. 30, 4, (July), 85:1–85:6.
19. Laub, A. 1979. A Schur method for solving algebraic Riccati equations. IEEE Transactions on Automatic Control 24, 6, 913–921. Cross Ref
20. Leishman, J. G. 2006. Principles of helicopter aerodynamics. Cambridge University Press.
21. Lentine, M., Grétarsson, J. T., Schroeder, C., Robinson-Mosher, A., and Fedkiw, R. 2011. Creature control in a fluid environment. IEEE TVCG 17, 5, 682–693.
22. Magnussen, Ø., Hovland, G., and Ottestad, M. 2014. Multicopter uav design optimization. In IEEE/ASME 10th International Conference on Mechatronic and Embedded Systems and Applications (MESA), 1–6.
23. Magnussen, Ø., Ottestad, M., and Hovland, G. 2015. Multicopter design optimization and validation. Modeling, Identification and Control 36, 2,, 67. Cross Ref
24. Martin, T., Umetani, N., and Bickel, B. 2015. OmniAD: data-driven omni-directional aerodynamics. ACM Trans. Graph. 34, 4, (July), 113:1–113:12.
25. MATLAB, 2016. Linear-Quadratic Regulator (LQR) design. http://www.mathworks.com/help/control/ref/lqr.html.
26. Meier, L., Tanskanen, P., Heng, L., Lee, G. H., Fraundorfer, F., and Pollefeys, M. 2012. PIXHAWK: a micro aerial vehicle design for autonomous flight using onboard computer vision. Autonomous Robots 33, 1–2.
27. Mori, Y., and Igarashi, T. 2007. Plushie: an interactive design system for plush toys. ACM Trans. Graph. 26, 3, (July), 45:1–45:8.
28. Nocedal, J., and Wright, S. 2006. Numerical optimization. Springer Science & Business Media.
29. Popović, J., Seitz, S. M., Erdmann, M., Popović, Z., and Witkin, A. 2000. Interactive manipulation of rigid body simulations. In Proceedings of the 27th annual conference on Computer graphics and interactive techniques, ACM Press/Addison-Wesley Publishing Co., 209–217.
30. Prévost, R., Whiting, E., Lefebvre, S., and Sorkine-Hornung, O. 2013. Make it stand: balancing shapes for 3d fabrication. ACM Trans. Graph. 32, 4, (July), 81:1–81:10.
31. Raffo, G. V., Ortega, M. G., and Rubio, F. R. 2010. An integral predictive/nonlinear H8 control structure for a quadrotor helicopter. Automatica 46, 1, 29–39.
32. RCBenchmark, 2016. Dynamometer. https://www.rcbenchmark.com/.
33. Roberts, M., and Hanrahan, P. 2016. Generating dynamically feasible trajectories for quadrotor cameras. ACM Trans. Graph. 35, 4, (July).
34. Saul, G., Lau, M., Mitani, J., and Igarashi, T. 2011. Sketchchair: an all-in-one chair design system for end users. In Proc. International Conference on Tangible, Embedded, and Embodied Interaction, 73–80.
35. Schulz, A., Shamir, A., Levin, D. I. W., Sitthi-amorn, P., and Matusik, W. 2014. Design and fabrication by example. ACM Trans. Graph. 33, 4, (July), 62:1–62:11.
36. SciPy, 2014. CARE solver. http://docs.scipy.org/doc/scipy-0.14.0/reference/generated/scipy.linalg.solve_continuous_are.html.
37. Skouras, M., Thomaszewski, B., Kaufmann, P., Garg, A., Bickel, B., Grinspun, E., and Gross, M. 2014. Designing inflatable structures. ACM Trans. Graph. 33, 4, (July), 63:1–63:10.
38. Tan, J., Gu, Y., Turk, G., and Liu, C. K. 2011. Articulated swimming creatures. ACM Trans. Graph. 30, 4, (July), 58:1–58:12.
39. Tan, J., Gu, Y., Liu, C. K., and Turk, G. 2014. Learning bicycle stunts. ACM Trans. Graph. 33, 4, (July), 50:1–50:12.
40. Tayebi, A., and McGilvray, S. 2004. Attitude stabilization of a four-rotor aerial robot. In Proc. IEEE Conference on Decision and Control. 2, 1216–1221. Cross Ref
41. Tedrake, R., 2014. Underactuated robotics: algorithms for walking, running, swimming, flying, and manipulation (course notes for MIT 6.832). http://underactuated.csail.mit.edu/underactuated.html.
42. Twigg, C. D., and James, D. L. 2008. Backward steps in rigid body simulation. ACM Trans. Graph. 27, 3, (August), 25:1–25:10.
43. Umetani, N., Kaufman, D. M., Igarashi, T., and Grinspun, E. 2011. Sensitive couture for interactive garment modeling and editing. ACM Trans. Graph. 30, 4, (July), 90:1–90:12.
44. Umetani, N., Igarashi, T., and Mitra, N. J. 2012. Guided exploration of physically valid shapes for furniture design. ACM Trans. Graph. 31, 4, (July), 86:1–86:11.
45. Umetani, N., Koyama, Y., Schmidt, R., and Igarashi, T. 2014. Pteromys: interactive design and optimization of free-formed free-flight model airplanes. ACM Trans. Graph. 33, 4, (July), 65:1–65:10.
46. Vouga, E., Höbinger, M., Wallner, J., and Pottmann, H. 2012. Design of self-supporting surfaces. ACM Trans. Graph. 31, 4, (July), 87:1–87:11.
47. Wampler, K., and Popović, Z. 2009. Optimal gait and form for animal locomotion. ACM Trans. Graph. 28, 3, (August), 60:1–60:8.
48. Waslander, S. L., Hoffmann, G. M., Jang, J. S., and Tomlin, C. J. 2005. Multi-agent quadrotor testbed control design: integral sliding mode vs reinforcement learning. In Intelligent Robots and Systems (IROS) 2005.
49. Whiting, E., Shin, H., Wang, R., Ochsendorf, J., and Durand, F. 2012. Structural optimization of 3D masonry buildings. ACM Trans. Graph. 31, 6, (November), 159:1–159:11.
50. Wu, J.-c., and Popović, Z. 2003. Realistic modeling of bird flight animations. ACM Trans. Graph. 22, 3, (July), 888–895.
51. Zhu, L., Xu, W., Snyder, J., Liu, Y., Wang, G., and Guo, B. 2012. Motion-guided mechanical toy modeling. ACM Trans. Graph. 31, 6, (November), 127:1–127:10.