
“Computational design of passive grippers” by Kodnongbua, Good, Lou, Lipton and Schulz
Conference:
Type(s):
Title:
- Computational design of passive grippers
Presenter(s)/Author(s):
Abstract:
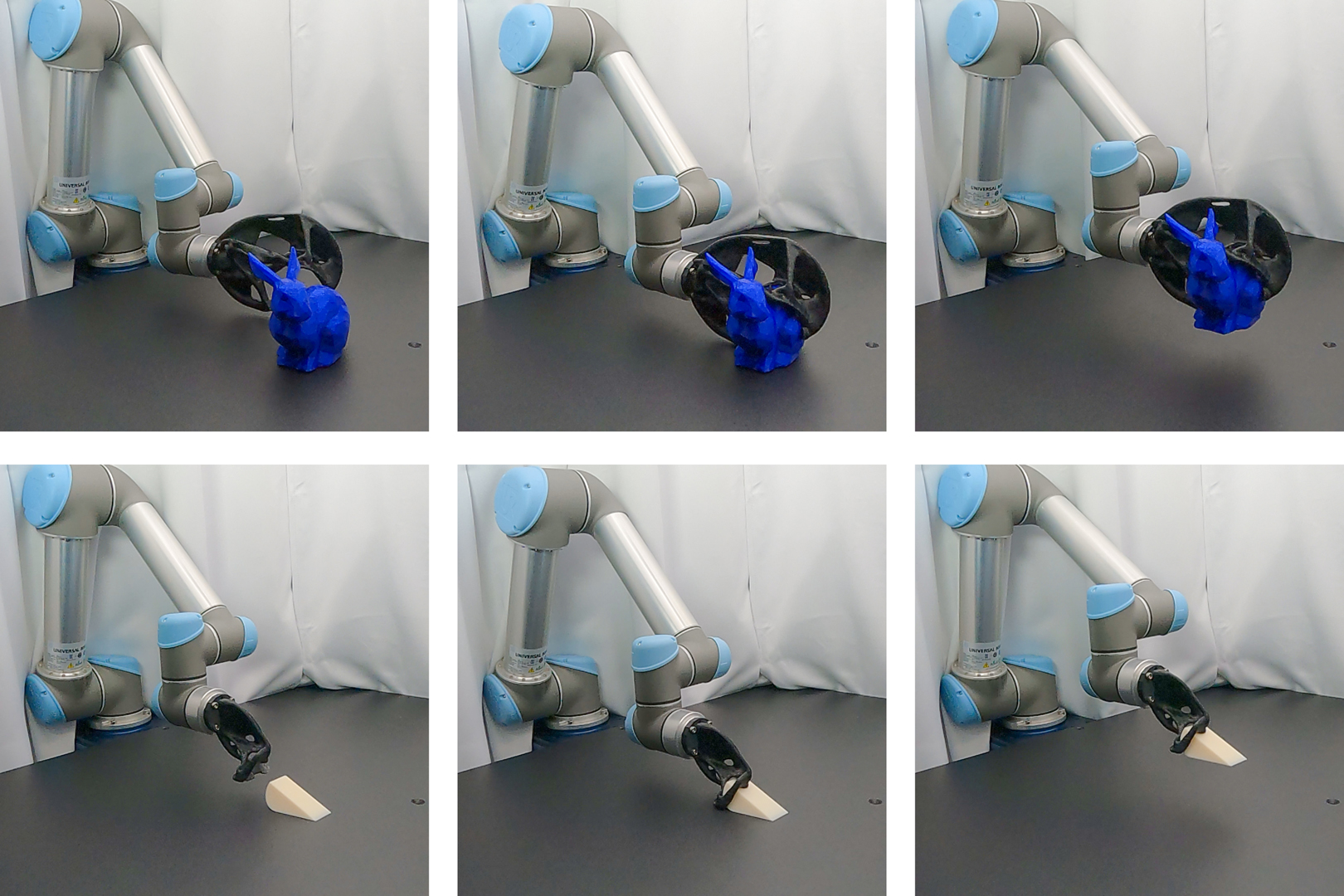
This work proposes a novel generative design tool for passive grippers—robot end effectors that have no additional actuation and instead leverage the existing degrees of freedom in a robotic arm to perform grasping tasks. Passive grippers are used because they offer interesting trade-offs between cost and capabilities. However, existing designs are limited in the types of shapes that can be grasped. This work proposes to use rapid-manufacturing and design optimization to expand the space of shapes that can be passively grasped. Our novel generative design algorithm takes in an object and its positioning with respect to a robotic arm and generates a 3D printable passive gripper that can stably pick the object up. To achieve this, we address the key challenge of jointly optimizing the shape and the insert trajectory to ensure a passively stable grasp. We evaluate our method on a testing suite of 22 objects (23 experiments), all of which were evaluated with physical experiments to bridge the virtual-to-real gap. Code and data are at https://homes.cs.washington.edu/~milink/passive-gripper/
References:
1. Martin Philip Bendsoe and Ole Sigmund. 2003. Topology optimization: theory, methods, and applications. Springer Science & Business Media.Google Scholar
2. Antonio Bicchi and Vijay Kumar. 2000. Robotic grasping and contact: A review. In Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), Vol. 1. IEEE, 348–353.Google ScholarCross Ref
3. D. Blanding. 1999. Exact Constraint: Machine Design Using Kinematic Principles. ASME Press. Google ScholarCross Ref
4. Luzius Brodbeck and Fumiya Iida. 2015. An extendible reconfigurable robot based on hot melt adhesives. Autonomous Robots 39, 1 (2015), 87–100.Google ScholarDigital Library
5. Russell G Brown and Randy C Brost. 1999. A 3-D modular gripper design tool. IEEE Transactions on Robotics and Automation 15, 1 (1999), 174–186.Google ScholarCross Ref
6. Herman Bruyninckx, Sabine Demey, and Vijay Kumar. 1998. Generalized stability of compliant grasps. In Proceedings. 1998 IEEE International Conference on Robotics and Automation (Cat. No. 98CH36146), Vol. 3. IEEE, 2396–2402.Google ScholarCross Ref
7. Berk Calli, Arjun Singh, Aaron Walsman, Siddhartha Srinivasa, Pieter Abbeel, and Aaron M. Dollar. 2015a. The YCB object and Model set: Towards common benchmarks for manipulation research. 2015 International Conference on Advanced Robotics (ICAR) (Jul 2015). Google ScholarCross Ref
8. Berk Calli, Aaron Walsman, Arjun Singh, Siddhartha Srinivasa, Pieter Abbeel, and Aaron M. Dollar. 2015b. Benchmarking in Manipulation Research: Using the Yale-CMU-Berkeley Object and Model Set. IEEE Robotics Automation Magazine 22, 3 (Sep 2015), 36–52. Google ScholarCross Ref
9. Angel X. Chang, Thomas Funkhouser, Leonidas Guibas, Pat Hanrahan, Qixing Huang, Zimo Li, Silvio Savarese, Manolis Savva, Shuran Song, Hao Su, Jianxiong Xiao, Li Yi, and Fisher Yu. 2015. ShapeNet: An Information-Rich 3D Model Repository. Technical Report arXiv:1512.03012 [cs.GR]. Stanford University — Princeton University — Toyota Technological Institute at Chicago.Google Scholar
10. Tianjian Chen, Zhanpeng He, and Matei Ciocarlie. 2020. Hardware as policy: Mechanical and computational co-optimization using deep reinforcement learning. arXiv preprint arXiv:2008.04460 (2020).Google Scholar
11. Whitney Crooks, Shane Rozen-Levy, Barry Trimmer, Chris Rogers, and William Messner. 2017. Passive gripper inspired by Manduca sexta and the Fin Ray® Effect. International Journal of Advanced Robotic Systems 14, 4 (2017), 1729881417721155.Google ScholarCross Ref
12. Kalyanmoy Deb, Samir Agrawal, Amrit Pratap, and Tanaka Meyarivan. 2000. A fast elitist non-dominated sorting genetic algorithm for multi-objective optimization: NSGA-II. In International conference on parallel problem solving from nature. Springer, 849–858.Google ScholarDigital Library
13. Raphael Deimel, Patrick Irmisch, Vincent Wall, and Oliver Brock. 2017. Automated co-design of soft hand morphology and control strategy for grasping. In 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 1213–1218.Google ScholarDigital Library
14. Krishnamanaswi M Digumarti, Christian Gehring, Stelian Coros, J Hwangbo, and Roland Siegwart. 2014. Concurrent optimization of mechanical design and locomotion control of a legged robot. In Mobile Service Robotics. World Scientific, 315–323.Google Scholar
15. Tao Du, Adriana Schulz, Bo Zhu, Bernd Bickel, and Wojciech Matusik. 2016. Computational multicopter design. ACM Transactions on Graphics (TOG) 35, 6 (2016), 1–10.Google ScholarDigital Library
16. Anthony V. Fiacco and Garth P. McCormick. 1964. The Sequential Unconstrained Minimization Technique for Nonlinear Programing, a Primal-Dual Method. Manage. Sci. 10, 2 (jan 1964), 360–366. Google ScholarDigital Library
17. Varan Gupta, Rithul Perathara, Aditya K Chaurasiya, and Jitendra P Khatait. 2019. Design and analysis of a flexure based passive gripper. Precision Engineering 56 (2019), 537–548.Google ScholarCross Ref
18. Huy Ha, Shubham Agrawal, and Shuran Song. 2020. Fit2Form: 3D Generative Model for Robot Gripper Form Design. arXiv preprint arXiv:2011.06498 (2020).Google Scholar
19. Sehoon Ha, Stelian Coros, Alexander Alspach, Joohyung Kim, and Katsu Yamane. 2017. Joint Optimization of Robot Design and Motion Parameters using the Implicit Function Theorem.. In Robotics: Science and systems, Vol. 8.Google Scholar
20. Christopher Hazard, Nancy Pollard, and Stelian Coros. 2018. Automated design of manipulators for in-hand tasks. In 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids). IEEE, 1–8.Google ScholarDigital Library
21. Stephanie Hendrixson. 2016. Laser-Sintered Grippers Solve Robotic Packing Challenges. https://www.additivemanufacturing.media/articles/laser-sintered-grippers-solve-robotic-packing-challengesGoogle Scholar
22. Mohammadali Honarpardaz, Martin Meier, and Robert Haschke. 2017a. Fast grasp tool design: From force to form closure. In 2017 13th IEEE Conference on Automation Science and Engineering (CASE). IEEE, 782–788.Google ScholarDigital Library
23. Mohammadali Honarpardaz, Mehdi Tarkian, Johan Ölvander, and Xiaolong Feng. 2017b. Finger design automation for industrial robot grippers: A review. Robotics and Autonomous Systems 87 (2017), 104–119.Google ScholarCross Ref
24. William Hunter et al. 2017. ToPy – Topology optimization with Python. https://github.com/williamhunter/topy.Google Scholar
25. Alec Jacobson, Daniele Panozzo, et al. 2018. libigl: A simple C++ geometry processing library. https://libigl.github.io/.Google Scholar
26. Steven G. Johnson. 2014. The NLopt nonlinear-optimization package. http://github.com/stevengj/nlopt.Google Scholar
27. P Kaelo and MM Ali. 2006. Some variants of the controlled random search algorithm for global optimization. Journal of optimization theory and applications 130, 2 (2006), 253–264.Google ScholarDigital Library
28. Heinrich Kruger and A Frank van der Stappen. 2011a. Partial closure grasps: Metrics and computation. In 2011 IEEE International Conference on Robotics and Automation. IEEE, 5024–5030.Google Scholar
29. Heinrich Kruger and A. Frank van der Stappen. 2011b. Partial closure grasps: Metrics and computation. In 2011 IEEE International Conference on Robotics and Automation. 5024–5030. Google ScholarCross Ref
30. S. Levine, C. Finn, T. Darrell, and P. Abbeel. 2016. End-to-End Training of Deep Visuomotor Policies. Journal of Machine Learning Research (JMLR) (2016).Google Scholar
31. Kevin Sebastian Luck, Heni Ben Amor, and Roberto Calandra. 2020. Data-efficient co-adaptation of morphology and behaviour with deep reinforcement learning. In Conference on Robot Learning. PMLR, 854–869.Google Scholar
32. Pingchuan Ma, Tao Du, John Z. Zhang, Kui Wu, Andrew Spielberg, Robert K. Katzschmann, and Wojciech Matusik. 2021. DiffAqua: A Differentiable Computational Design Pipeline for Soft Underwater Swimmers with Shape Interpolation. ACM Trans. Graph. 40, 4, Article 132 (jul 2021), 14 pages. Google ScholarDigital Library
33. J. Mahler, J. Liang, S. Niyaz, M. Laskey, R. Doan, X. Liu, J. Ojea, and K. Goldberg. 2017. Dex-Net 2.0: Deep Learning to Plan Robust Grasps with Synthetic Point Clouds and Analytic Grasp Metrics. In Proc. of Robotics: Science and Systems (RSS).Google Scholar
34. Jeremy Maitin-Shepard, Marco Cusumano-Towner, Jinna Lei, and Pieter Abbeel. 2010. Cloth grasp point detection based on multiple-view geometric cues with application to robotic towel folding. In 2010 IEEE International Conference on Robotics and Automation. IEEE, 2308–2315.Google ScholarCross Ref
35. Arsalan Mousavian, Clemens Eppner, and Dieter Fox. 2019. 6-DOF GraspNet: Variational Grasp Generation for Object Manipulation. In International Conference on Computer Vision. arXiv:1905.10520 http://arxiv.org/abs/1905.10520Google ScholarCross Ref
36. Caio Mucchiani, Monroe Kennedy, Mark Yim, and Jungwon Seo. 2018. Object picking through in-hand manipulation using passive end-effectors with zero mobility. IEEE Robotics and Automation Letters 3, 2 (2018), 1096–1103.Google ScholarCross Ref
37. Caio Mucchiani and Mark Yim. 2021. Dynamic Grasping for Object Picking Using Passive Zero-DOF End-Effectors. IEEE Robotics and Automation Letters 6, 2 (2021), 3089–3096.Google ScholarCross Ref
38. A. Murali, A. Mousavian, C. Eppner, C. Paxton, and D. Fox. 2020. 6-DOF Grasping for Target-driven Object Manipulation in Clutter. In Proc. of the IEEE International Conference on Robotics & Automation (ICRA).Google Scholar
39. A. Nagabandi, K. Konolige, S. Levine, and V. Kumar. 2019. Deep Dynamics Models for Learning Dexterous Manipulation. In Proc. of the Conference on Robot Learning (CoRL).Google Scholar
40. Kenji Nagaoka, Hayato Minote, Kyohei Maruya, Yuki Shirai, Kazuya Yoshida, Takeshi Hakamada, Hirotaka Sawada, and Takashi Kubota. 2018. Passive spine gripper for free-climbing robot in extreme terrain. IEEE Robotics and Automation Letters 3, 3 (2018), 1765–1770.Google ScholarCross Ref
41. Xinlei Pan, Animesh Garg, Animashree Anandkumar, and Yuke Zhu. 2020. Emergent Hand Morphology and Control from Optimizing Robust Grasps of Diverse Objects. arXiv preprint arXiv:2012.12209 (2020).Google Scholar
42. Dalibor Petković, Nenad D Pavlović, Shahaboddin Shamshirband, and Nor Badrul Anuar. 2013. Development of a new type of passively adaptive compliant gripper. Industrial Robot: An International Journal (2013).Google ScholarCross Ref
43. Zengyi Qin, Kuan Fang, Yuke Zhu, Li Fei-Fei, and Silvio Savarese. 2020. KETO: Learning Keypoint Representations for Tool Manipulation. (2020).Google Scholar
44. R. Rahmatizadeh, P. Abolghasemi, L. Boloni, and S. Levine. 2018. Vision-Based Multi-Task Manipulation for Inexpensive Robots Using End-to-End Learning from Demonstration. In Proc. of the IEEE International Conference on Robotics & Automation (ICRA).Google Scholar
45. Alberto Rodriguez, Matthew T Mason, and Steve Ferry. 2012. From caging to grasping. The International Journal of Robotics Research 31, 7 (2012), 886–900.Google ScholarDigital Library
46. Andreas Schroeffer, Christoph Rehekampff, and Tim C Lueth. 2019. An Automated Design Approach for Task-Specific two Finger Grippers for Industrial Applications. In 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, 184–189.Google ScholarDigital Library
47. Arthur Seibel, Mert Yıldız, and Berkan Zorlubaş. 2020. A Gecko-Inspired Soft Passive Gripper. Biomimetics 5, 2 (2020), 12.Google ScholarCross Ref
48. Daniel Seita, Nawid Jamali, Michael Laskey, Ajay Kumar Tanwani, Ron Berenstein, Prakash Baskaran, Soshi Iba, John Canny, and Ken Goldberg. 2019. Deep transfer learning of pick points on fabric for robot bed-making. (2019).Google Scholar
49. Silvia Sellán, Noam Aigerman, and Alec Jacobson. 2021. Swept Volumes via Spacetime Numerical Continuation. ACM Transactions on Graphics (2021).Google Scholar
50. Jungwon Seo, Mark Yim, and Vijay Kumar. 2016. A theory on grasping objects using effectors with curved contact surfaces and its application to whole-arm grasping. The International Journal of Robotics Research 35, 9 (2016), 1080–1102.Google ScholarDigital Library
51. Andrew Spielberg, Allan Zhao, Yuanming Hu, Tao Du, Wojciech Matusik, and Daniela Rus. 2019. Learning-in-the-loop optimization: End-to-end control and co-design of soft robots through learned deep latent representations. Advances in Neural Information Processing Systems 32 (2019), 8284–8294.Google Scholar
52. Kerry Stevenson. 2019. What Every 3D Printing Company Should Be Doing. Online. https://www.fabbaloo.com/blog/2019/11/19/what-every-3d-printing-company-should-be-doingGoogle Scholar
53. Andreas ten Pas, Marcus Gualtieri, Kate Saenko, and Robert Platt. 2017. Grasp pose detection in point clouds. The International Journal of Robotics Research 36, 13–14 (2017), 1455–1473.Google Scholar
54. The CGAL Project. 2021. CGAL User and Reference Manual (5.3.1 ed.). CGAL Editorial Board. https://doc.cgal.org/5.3.1/Manual/packages.htmlGoogle Scholar
55. VB Velasco and Wyatt S Newman. 1998. Computer-assisted gripper and fixture customization using rapid-prototyping technology. In Proceedings. 1998 IEEE International Conference on Robotics and Automation (Cat. No. 98CH36146), Vol. 4. IEEE, 3658–3664.Google ScholarCross Ref
56. Jie Xu, Tao Chen, Lara Zlokapa, Michael Foshey, Wojciech Matusik, Shinjiro Sueda, and Pulkit Agrawal. 2021. An End-to-End Differentiable Framework for Contact-Aware Robot Design. In Robotics: Science and Systems.Google Scholar
57. Haijie Zhang, Elisha Lerner, Bo Cheng, and Jianguo Zhao. 2020. Compliant Bistable Grippers Enable Passive Perching for Micro Aerial Vehicles. IEEE/ASME Transactions on Mechatronics (2020).Google Scholar
58. Allan Zhao, Jie Xu, Mina Konaković-Luković, Josephine Hughes, Andrew Spielberg, Daniela Rus, and Wojciech Matusik. 2020. RoboGrammar: graph grammar for terrain-optimized robot design. ACM Transactions on Graphics (TOG) 39, 6 (2020), 1–16.Google ScholarDigital Library
59. Bo Zhu, Mélina Skouras, Desai Chen, and Wojciech Matusik. 2017. Two-Scale Topology Optimization with Microstructures. arXiv:1706.03189 [cs.CE]Google Scholar