
“Automated view and path planning for scalable multi-object 3D scanning” by Fan, Zhang, Brown and Rusinkiewicz
Conference:
Type(s):
Title:
- Automated view and path planning for scalable multi-object 3D scanning
Session/Category Title:
- Data Driven Modeling
Presenter(s)/Author(s):
Abstract:
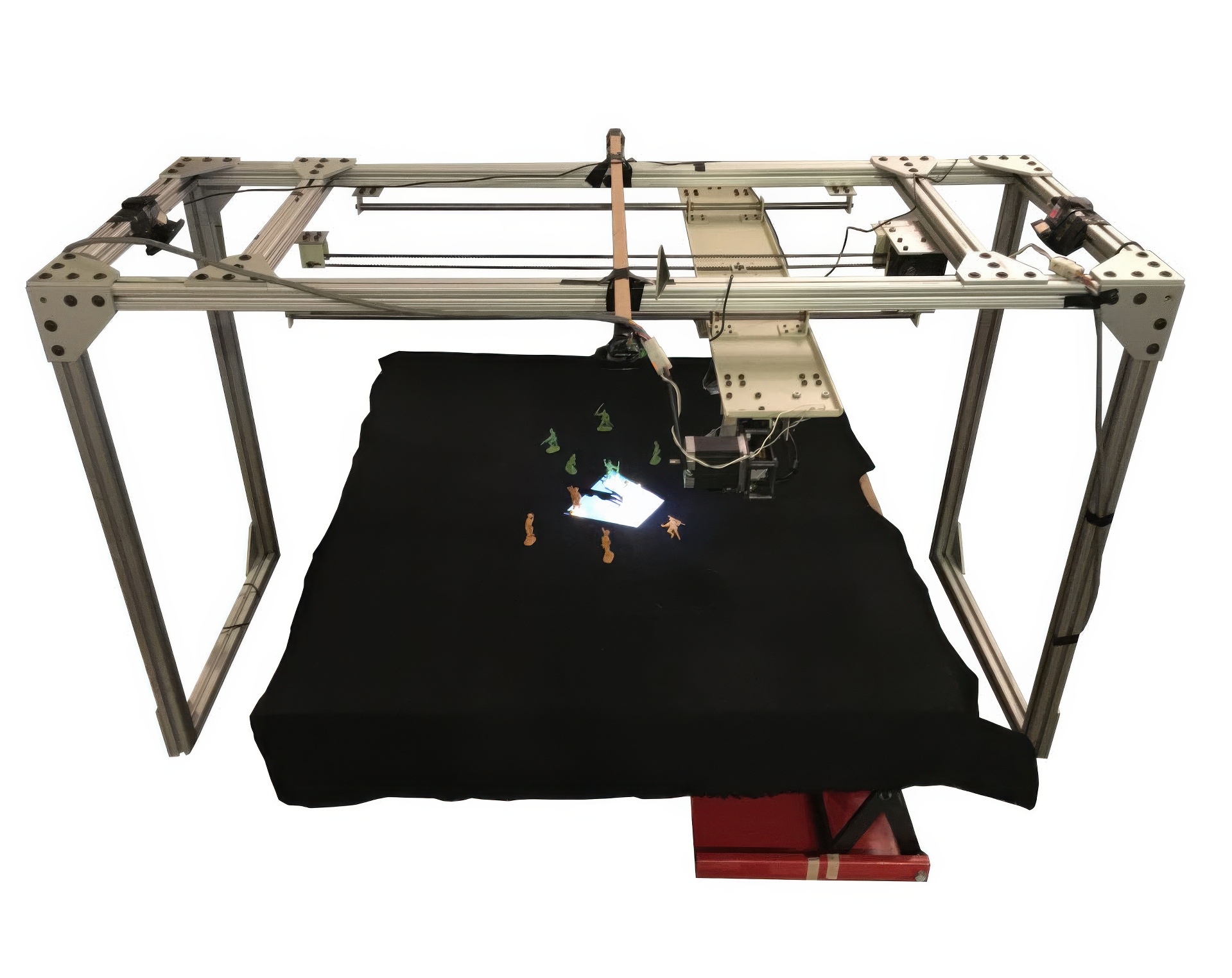
Demand for high-volume 3D scanning of real objects is rapidly growing in a wide range of applications, including online retailing, quality-control for manufacturing, stop motion capture for 3D animation, and archaeological documentation and reconstruction. Although mature technologies exist for high-fidelity 3D model acquisition, deploying them at scale continues to require non-trivial manual labor. We describe a system that allows non-expert users to scan large numbers of physical objects within a reasonable amount of time, and with greater ease. Our system uses novel view- and path-planning algorithms to control a structured-light scanner mounted on a calibrated motorized positioning system. We demonstrate the ability of our prototype to safely, robustly, and automatically acquire 3D models for large collections of small objects.
References:
1. Berkiten, S., Fan, X., and Rusinkiewicz, S. 2014. Merge2-3D: Combining multiple normal maps with 3D surfaces. Proc. Int. Conf. 3D Vision (3DV) (Dec.), 440–447.
2. Bernardini, F., and Rushmeier, H. 2002. The 3D model acquisition pipeline. Computer Graphics Forum 21, 2, 149–172. Cross Ref
3. Bernardini, F., Rushmeier, H., Martin, I. M., Mittleman, J., and Taubin, G. 2002. Building a digital model of Michelangelo’s Florentine Pietà. IEEE Computer Graphics and Applications 22, 59–67.
4. Bowyer, K. W., and Dyer, C. R. 1990. Aspect graphs: An introduction and survey of recent results. In Proc. SPIE: Close-Range Photogrammetry Meets Machine Vision, vol. 1395, 200 — 208.
5. Brown, B. J., Toler-Franklin, C., Nehab, D., Burns, M., Dobkin, D., Vlachopoulos, A., Doumas, C., Rusinkiewicz, S., and Weyrich, T. 2008. A system for high-volume acquisition and matching of fresco fragments: Reassembling Theran wall paintings. ACM Trans. Graphics (Proc. SIGGRAPH) 27, 3.
6. Chen, S., Li, Y., and Kwok, N. M. 2011. Active vision in robotic systems: A survey of recent developments. Int. J. Robotics Research 30, 11, 1343–1377.
7. Cheng, P., Keller, J. F., and Kumar, V. 2008. Time-optimal UAV trajectory planning for 3D urban structure coverage. In Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS), 2750–2757.
8. Christofides, N. 1976. Worst-case analysis of a new heuristic for the travelling salesman problem. Technical Report 388, Graduate School of Industrial Administration, Carnegie Mellon University.
9. Curless, B., and Levoy, M. 1996. A volumetric method for building complex models from range images. In Proc. ACM SIGGRAPH, 303–312.
10. Englot, B., and Hover, F. 2010. Inspection planning for sensor coverage of 3D marine structures. In Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS), 4412–4417.
11. Feige, U. 1998. A threshold of Ln N for approximating set cover. J. ACM 45, 4, 634–652.
12. Gonzalez-Barbosa, J.-J., García-Ramírez, T., Salas, J., Hurtado-Ramos, J.-B., and Rico-Jiménez, J.-d.-J. 2009. Optimal camera placement for total coverage. In Proc. IEEE Int. Conf. Robotics and Automation (ICRA), 3672–3676.
13. Gurobi Optimization, I., 2015. Gurobi optimizer reference manual. http://www.gurobi.com.
14. Karp, R. M. 1972. Reducibility among combinatorial problems. In Complexity of Computer Computations, R. E. Miller and J. W. Thatcher, Eds. Plenum, 85–103.
15. Kazhdan, M., and Hoppe, H. 2013. Screened Poisson surface reconstruction. ACM Trans. Graph. 32, 3, 29:1–29:13.
16. Kirkpatrick, S., Gelatt, C. D., and Vecchi, M. P. 1983. Optimization by simulated annealing. Science 220, 671–680. Cross Ref
17. Kriegel, S., Brucker, M., Marton, Z. C., Bodenmller, T., and Suppa, M. 2013. Combining object modeling and recognition for active scene exploration. In Proc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS), 2384–2391.
18. Laurentini, A. 1994. The visual hull concept for silhouette-based image understanding. IEEE Trans. PAMI 16, 2, 150–162.
19. Lawler, E. L., Lenstra, J. K., Kan, A. R., and Shmoys, D. B. 1985. The traveling salesman problem: a guided tour of combinatorial optimization, vol. 3. Wiley.
20. Levoy, M., Pulli, K., Curless, B., Rusinkiewicz, S., Koller, D., Pereira, L., Ginzton, M., Anderson, S., Davis, J., Ginsberg, J., Shade, J., and Fulk, D. 2000. The Digital Michelangelo Project: 3D scanning of large statues. In Proc. ACM SIGGRAPH, 131–144.
21. Olson, E. 2011. AprilTag: A robust and flexible visual fiducial system. In Proc. IEEE Int. Conf. Robotics and Automation (ICRA), 3400–3407. Cross Ref
22. Rusinkiewicz, S., and Levoy, M. 2001. Efficient variants of the ICP algorithm. In Proc. 3D Digital Imaging and Modeling (3DIM), 145–152.
23. Rusinkiewicz, S., Hall-Holt, O., and Levoy, M. 2002. Real-time 3D model acquisition. ACM Trans. Graph. 21, 3, 438–446.
24. Salvi, J., Pagès, J., and Batlle, J. 2004. Pattern codification strategies in structured light systems. Pattern Recognition 37, 827–849. Cross Ref
25. Scott, W. R., Yz, W. R. S., Roth, G., and Rivest, J.-F. 2001. View planning as a set covering problem. Tech. Rep. 44892, NRC Canada.
26. Scott, W. R., Roth, G., and Rivest, J.-F. 2003. View planning for automated three-dimensional object reconstruction and inspection. ACM Computing Surveys 35, 1, 64–96.
27. Tarbox, G. H., and Gottschlich, S. N. 1995. Planning for complete sensor coverage in inspection. Computer Vision and Image Understanding 61, 1, 84–111.
28. Taylor, C. 2012. Implementing high resolution structured light by exploiting projector blur. In Proc. IEEE Workshop on Applications of Computer Vision (WACV), 9–16.
29. Urrutia, J. 2000. Art gallery and illumination problems. In Handbook of Computational Geometry, J. Sack and J. Urrutia, Eds. Elsevier.
30. Vázquez, P.-P., Feixas, M., Sbert, M., and Heidrich, W. 2001. Viewpoint selection using viewpoint entropy. In Proc. Vision Modeling and Visualization (VMV), 273–280.
31. Wang, P., Krishnamurti, R., and Gupta, K. 2007. View planning problem with combined view and traveling cost. In Proc. IEEE Int. Conf. Robotics and Automation (ICRA), 711–716.
32. Weise, T., Wismer, T., Leibe, B., and Gool, L. V. 2009. In-hand scanning with online loop closure. In Proc. 3D Digital Imaging and Modeling (3DIM).
33. Wu, S., Sun, W., Long, P., Huang, H., Cohen-Or, D., Gong, M., Deussen, O., and Chen, B. 2014. Quality-driven Poisson-guided autoscanning. ACM Trans. Graph. 33, 6, 203:1–203:12.
34. Xu, K., Huang, H., Shi, Y., Li, H., Long, P., Caichen, J., Sun, W., and Chen, B. 2015. Autoscanning for coupled scene reconstruction and proactive object analysis. ACM Trans. Graph. 34, 6, 177:1–177:14.
35. Yan, F., Sharf, A., Lin, W., Huang, H., and Chen, B. 2014. Proactive 3D scanning of inaccessible parts. ACM Trans. Graph. 33, 4, 157:1–157:8.
36. Zhao, J., Yoshida, R., ching Samson Cheung, S., and Haws, D. 2013. Approximate techniques in solving optimal camera placement problems. Int. J. Distributed Sensor Networks, Article ID 241913.