
“Animating responsive characters with dynamic constraints in near-unactuated coordinates”
Conference:
Type(s):
Title:
- Animating responsive characters with dynamic constraints in near-unactuated coordinates
Session/Category Title:
- Character animation I
Presenter(s)/Author(s):
Abstract:
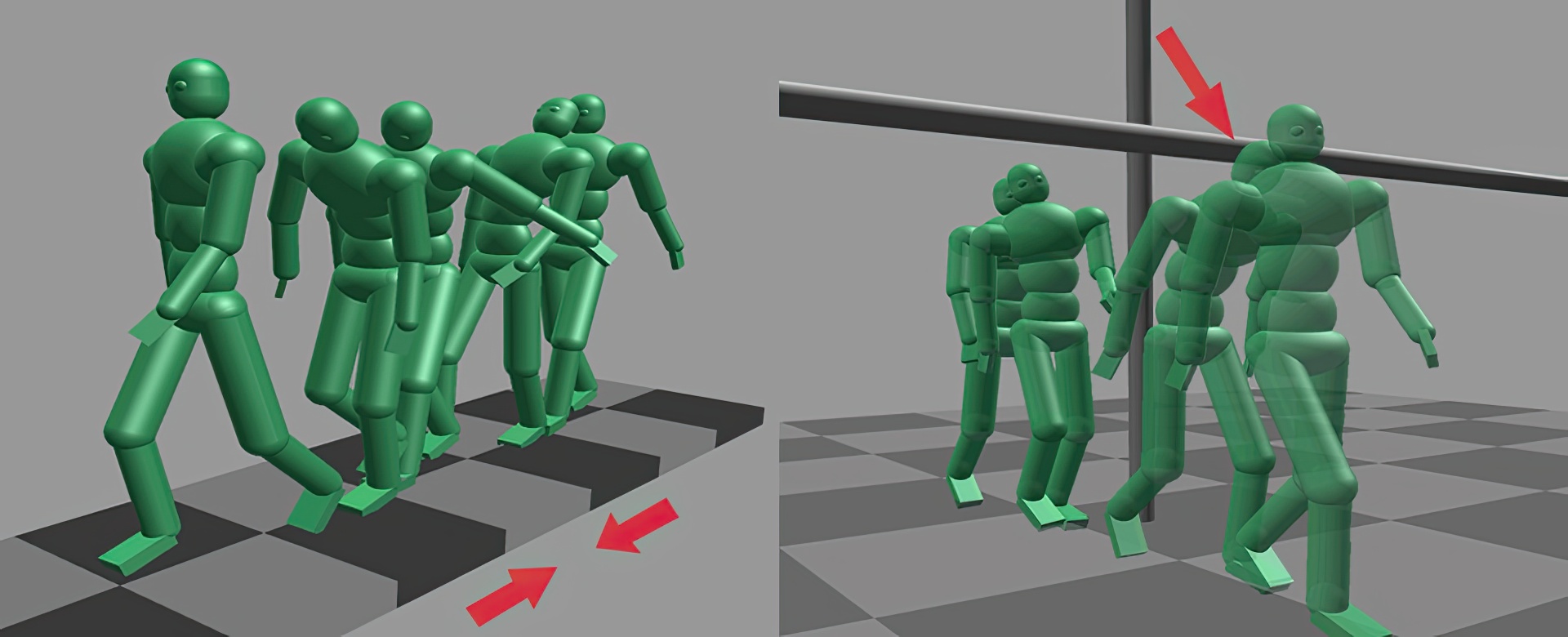
This paper presents a technique to enhance a kinematically controlled virtual character with a generic class of dynamic responses to small perturbations. Given an input motion sequence, our technique can synthesize reactive motion to arbitrary external forces with a specific style customized to the input motion. Our method re-parameterizes the motion degrees of freedom based on joint actuations in the input motion. By only enforcing the equations of motion in the less actuated coordinates, our approach can create physically responsive motion based on kinematic pose control without explicitly computing the joint actuations. We demonstrate the simplicity and robustness of our technique by showing a variety of examples generated with the same set of parameters. Our formulation focuses on the type of perturbations that significantly disrupt the upper body poses and dynamics, but have limited effect on the whole-body balance state.
References:
1. Abe, Y., and Popović, J. 2006. Interactive animation of dynamic manipulation. In Eurographics/SIGGRAPH Symposium on Computer Animation. Google ScholarDigital Library
2. Abe, Y., da Silva, M., and Popović, J. 2007. Multiobjective control with frictional contacts. In Eurographics/SIGGRAPH Symposium on Computer Animation, 249–258. Google ScholarDigital Library
3. Alexandrov, A., Frolov, A., Horak, F., Carlson-Kuhta, P., and Park, S. 2005. Feedback equilibrium control during human standing. Biological Cybernetics 93, 5, 309–322. Google ScholarDigital Library
4. Arikan, O., O’Brien, J. F., and Forsyth, D. A. 2005. Pushing people around. In Eurographics/SIGGRAPH Symposium on Computer Animation, 59–66. Google Scholar
5. Barbic, J., Safonova, A., Pan, J.-Y., Faloutsos, C., Hodgins, J. K., and Pollard, N. S. 2004. Segmenting motion capture data into distinct behaviors. In Graphics Interface, vol. 62, 185–194. Google ScholarDigital Library
6. Brand, M., and Hertzmann, A. 2000. Style machines. In SIGGRAPH, 183–192. Google Scholar
7. Chai, J., and Hodgins, J. K. 2007. Constraint-based motion optimization using a statistical dynamic model. ACM Trans. on Graphics (SIGGRAPH) 26, 3 (Aug.), 8. Google ScholarDigital Library
8. Cooper, S., Hertzmann, A., and Popović, Z. 2007. Active learning for real-time motion controllers. ACM Trans. on Graphics (SIGGRAPH) 26, 3 (Aug.), 5. Google ScholarDigital Library
9. da Silva, M., Abe, Y., and Popović, J. 2008. Interactive simuation of stylized human locomotion. ACM Trans. on Graphics (SIGGRAPH) 27, 3 (Aug.). Google ScholarDigital Library
10. Georgopoulos, A., Kalaska, J., and Massey, J. 1981. Spatial trajectories and reaction times of aimed movements: Effects of practice, uncertainty and change in target location. Journal of Neurophysiology 46, 725–743.Google ScholarCross Ref
11. Gill, P., Saunders, M., and Murray, W. 1996. Snopt: An sqp algorithm for large-scale constrained optimization. Tech. Rep. NA 96-2, University of California, San Diego.Google Scholar
12. Jenkins, O. C., and Matarić, M. J. 2002. Deriving action and behavior primitives from human motion data. In IEEE/RSJ, 2551–2556.Google Scholar
13. Kokkevis, E., Metaxas, D., and Badler, N. I. 1996. User-controlled physics-based animation for articulated figures. In Computer Animation. Google Scholar
14. Komura, T., Leung, H., and Kuffner, J. 2004. Animating reactive motions for biped locomotion. In VRST ’04: Proceedings of the ACM symposium on Virtual reality software and technology, 32–40. Google Scholar
15. Komura, T., Ho, E. S. L., and Lau, R. W. H. 2005. Animating reactive motions using momentum-based inverse kinematics. Computer Animation and Virtual Worlds, 16, 213–223. Google ScholarDigital Library
16. Liu, C. K., Hertzmann, A., and Popović, Z. 2005. Learning physics-based motion style with nonlinear inverse optimization. ACM Trans. on Graphics (SIGGRAPH) 24, 3 (July), 1071–1081. Google ScholarDigital Library
17. Mandel, M., 2004. Versatile and interactive virtual humans: Hybrid use of data-driven and dynamics-based motion synthesis.Google Scholar
18. McCann, J., and Pollard, N. S. 2007. Responsive characters from motion fragments. ACM Trans. on Graphics (SIGGRAPH) 26, 3 (Aug.). Google ScholarDigital Library
19. Miall, R. C., Weir, D. J., and Stein, J. F. 1985. Visuomotor tracking with delayed visual feedback. Neuroccience 16, 3, 511–520.Google ScholarCross Ref
20. Oshita, M., and Makinouchi, A. 2001. A dynamic motion control technique for human-like articulated figures. Computer Graphics Forum 20, 3, 192–202.Google ScholarCross Ref
21. Safonova, A., Hodgins, J. K., and Pollard, N. S. 2004. Synthesizing physically realistic human motion in low-dimensinal, behavior-specific spaces. ACM Trans. on Graphics (SIGGRAPH) 23, 3 (July), 514–521. Google ScholarDigital Library
22. Shapiro, A., Pighin, F. H., and Faloutsos, P. 2003. Hybrid control for interactive character animation. In Pacific Graphics, 456–461. Google Scholar
23. Shin, H. J., and Oh, H. S. 2006. Fat graphs: Constructing an interactive character with continuous controls. In Eurographics/SIGGRAPH Symposium on Computer Animation. Google ScholarDigital Library
24. Sok, K. W., Kim, M., and Lee, J. 2007. Simulating biped behaviors from human motion data. ACM Trans. on Graphics (SIGGRAPH) 26, 3 (Aug.), 107. Google ScholarDigital Library
25. Ting, L. H. 2007. Dimensional reducation in sensorimotor systems. Computational Neuroscience 13, 2 (Apr.), 103–136.Google Scholar
26. Torres-Oviedo, G., and Ting, L. H. 2007. Muscle synergies characterizing human postural responses. Journal of Neurophysiology 98, 2144–2156.Google ScholarCross Ref
27. Tresch, M. C., Cheung, V. C., and d’Avella, A. 2006. Matrix factorization algorithms for the identification of muscle synergies: Evaluation on simulated and experimental data sets. Journal of Neurophysiology 95, 2199–2212.Google ScholarCross Ref
28. Treuille, A., Lee, Y., and Popović, Z. 2007. Near-optimal character animation with continuous control. ACM Trans. on Graphics (SIGGRAPH) 26, 3 (Aug.). Google ScholarDigital Library
29. Yin, K., Cline, M. B., and Pai, D. K. 2003. Motion perturbation based on simple neuromotor control models. In Pacific Graphics. Google Scholar
30. Yin, K., Pai, D. K., and van de Panne, M. 2005. Data-driven interactive balancing behaviors. In Pacific Graphics.Google Scholar
31. Yin, K., Loken, K., and van de Panne, M. 2007. Simbicon: simple biped locomotion control. ACM Trans. on Graphics (SIGGRAPH) 26, 3, 105–115. Google ScholarDigital Library
32. Zordan, V. B., and Hodgins, J. K. 2002. Motion capture-driven simulations that hit and react. In Eurographics/SIGGRAPH Symposium on Computer Animation, 89–96. Google Scholar
33. Zordan, V. B., Majkowska, A., Chiu, B., and Fast, M. 2005. Dynamic response for motion capture animation. ACM Trans. on Graphics (SIGGRAPH) 24, 3 (July), 697–701. Google ScholarDigital Library