
“An interactive tool for designing quadrotor camera shots” by Joubert, Roberts, Truong, Berthouzoz and Hanrahan
Conference:
Type(s):
Title:
- An interactive tool for designing quadrotor camera shots
Session/Category Title:
- Cinematography and Video Processing
Presenter(s)/Author(s):
Abstract:
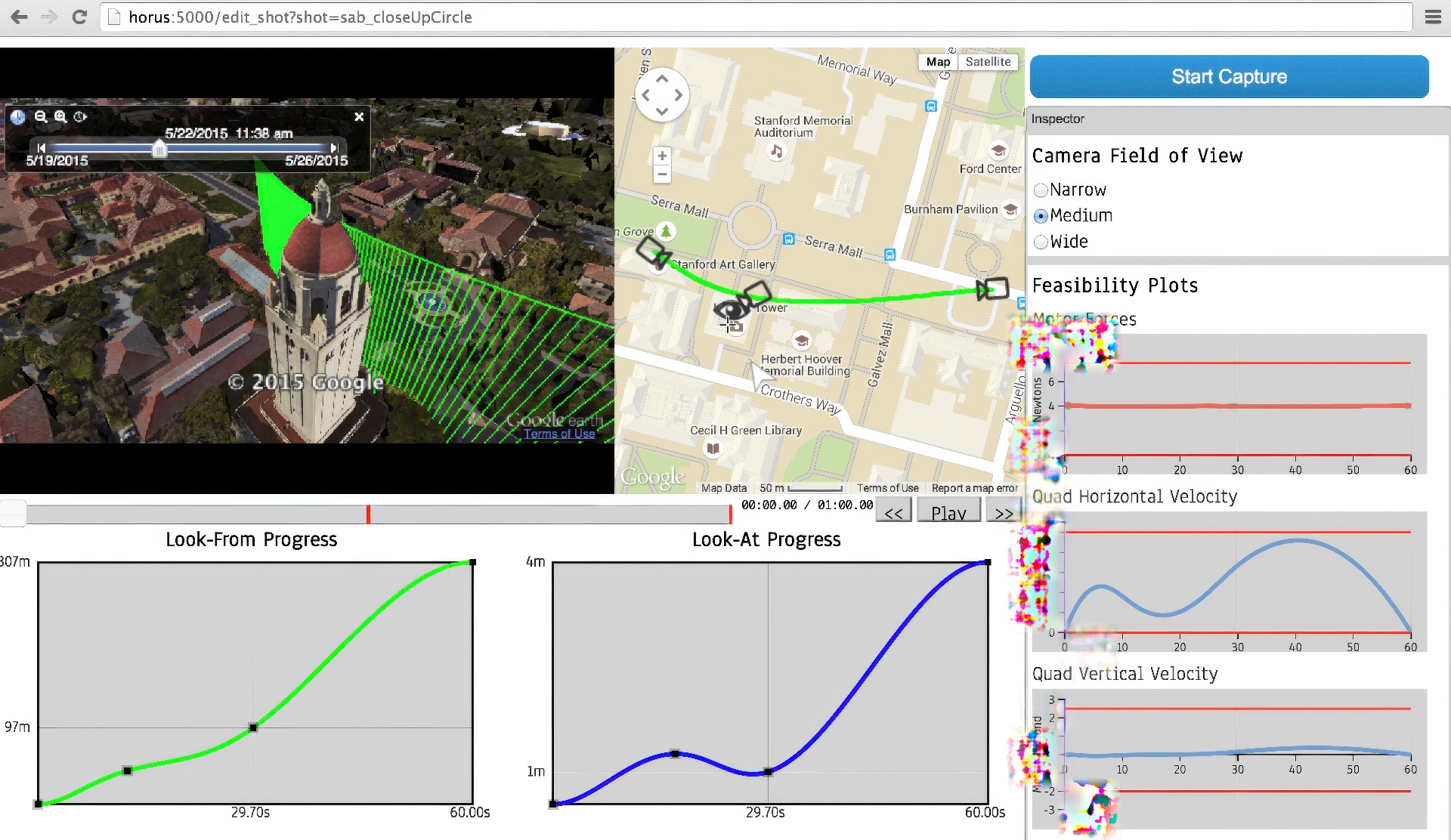
Cameras attached to small quadrotor aircraft are rapidly becoming a ubiquitous tool for cinematographers, enabling dynamic camera movements through 3D environments. Currently, professionals use these cameras by flying quadrotors manually, a process which requires much skill and dexterity. In this paper, we investigate the needs of quadrotor cinematographers, and build a tool to support video capture using quadrotor-based camera systems. We begin by conducting semi-structured interviews with professional photographers and videographers, from which we extract a set of design principles. We present a tool based on these principles for designing and autonomously executing quadrotor-based camera shots. Our tool enables users to: (1) specify shots visually using keyframes; (2) preview the resulting shots in a virtual environment; (3) precisely control the timing of shots using easing curves; and (4) capture the resulting shots in the real world with a single button click using commercially available quadrotors. We evaluate our tool in a user study with novice and expert cinematographers. We show that our tool makes it possible for novices and experts to design compelling and challenging shots, and capture them fully autonomously.
References:
1. 3D Robotics, 2014. IRIS+. http://3drobotics.com/iris/.
2. 3D Robotics, 2015. Solo. http://3drobotics.com/solo/.
3. APM, 2015. APM Autopilot Suite. http://ardupilot.com/.
4. Arijon, D. 1976. Grammar of the Film Language. Hastings House Publishers.
5. Bartels, R. H., Beatty, J. C., and Barsky, B. A. 1987. An Introduction to Splines for use in Computer Graphics & Geometric Modeling. Morgan Kaufmann Publishers.
6. Boyd, S., and Vandenberghe, L. 2004. Convex Optimization. Cambridge University Press.
7. Christie, M., Olivier, P., and Normand, J.-M. 2008. Camera control in computer graphics. Computer Graphics Forum 27, 8.
8. Diebel, J., 2006. Representing attitude: Euler angles, unit quaternions, and rotation vectors.
9. DJI, 2015. DJI Go. http://www.dji.com/product/goapp.
10. DJI, 2015. DJI Ground Station. http://www.dji.com/product/pc-ground-station.
11. Guenter, B., and Parent, R. 1990. Motion control: Computing the arc length of parametric curves. Computer Graphics Applications 10, 3.
12. Hsu, W.-H., Zhang, Y., and Ma, K.-L. 2013. A multi-criteria approach to camera motion design for volume data animation. Transactions on Visualization and Computer Graphics (Proc. SciVis 2013) 19, 12.
13. Katz, S. D. 1991. Film Directing Shot by Shot. Butterworth Publishers.
14. Kim, S., Choi, S., and Kim, H. J. 2013. Aerial manipulation using a quadrotor with a two DOF robotic arm. In Intelligent Robots and Systems (IROS) 2013.
15. Kumar, V., and Michael, N. 2012. Opportunities and challenges with autonomous micro aerial vehicles. International Journal of Robotics Research 31, 11.
16. Lasseter, J. 1987. Principles of traditional animation applied to 3D computer animation. In SIGGRAPH 1987.
17. Lippiello, V., and Ruggiero, F. 2012. Exploiting redundancy in cartesian impedance control of UAVs equipped with a robotic arm. In Intelligent Robots and Systems (IROS) 2012.
18. Mascelli, J. 1965. The Five C’s of Cinematography. Silman-James Press.
19. Meier, L., Tanskanen, P., Heng, L., Lee, G. H., Fraundorfer, F., and Pollefeys, M. 2012. PIXHAWK: A micro aerial vehicle design for autonomous flight using onboard computer vision. Autonomous Robots 33, 1–2.
20. Mellinger, D., and Kumar, V. 2011. Minimum snap trajectory generation and control for quadrotors. In International Conference on Robotics and Automation (ICRA) 2011.
21. Oskam, T., Sumner, R. W., Thuerey, N., and Gross, M. 2009. Visibility transition planning for dynamic camera control. In Symposium on Computer Animation (SCA) 2009.
22. Parent, R. 2007. Computer Animation: Algorithms and Techniques. Morgan Kaufmann Publishers.
23. Richter, C., Bry, A., and Roy, N. 2013. Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments. In International Symposium of Robotics Research (ISRR) 2013.
24. Ruggiero, F., Trujillo, M., Cano, R., Ascorbe, H., Viguria, A., Perez, C., Lippiello, V., Ollero, A., and Siciliano, B. 2015. A multilayer control for multirotor UAVs equipped with a servo robot arm. In International Conference on Robotics and Automation (ICRA) 2015.
25. Srikanth, M., Bala, K., and Durand, F. 2014. Computational rim illumination with aerial robots. In Computational Aesthetics (CAe) 2014.
26. Tedrake, R., 2014. Underactuated robotics: Algorithms for walking, running, swimming, flying, and manipulation (course notes for MIT 6.832). http://people.csail.mit.edu/russt/underactuated/.
27. Teuliere, C., Eck, L., and Marchand, E. 2011. Chasing a moving target from a flying UAV. In Intelligent Robots and Systems (IROS) 2011.
28. Yang, H., and Lee, D. 2014. Dynamics and control of quadrotor with robotic manipulator. In International Conference on Robotics and Automation (ICRA) 2014.
29. Yuksel, C., Schaefer, S., and Keyser, J. 2011. Parameterization and applications of Catmull-Rom curves. Computer Aided Design 43, 7.