
“WholeGrip: Grip Type Master Hand with the Whole Hand Tactile Feedback”
Conference:
Type(s):
Title:
- WholeGrip: Grip Type Master Hand with the Whole Hand Tactile Feedback
Description:
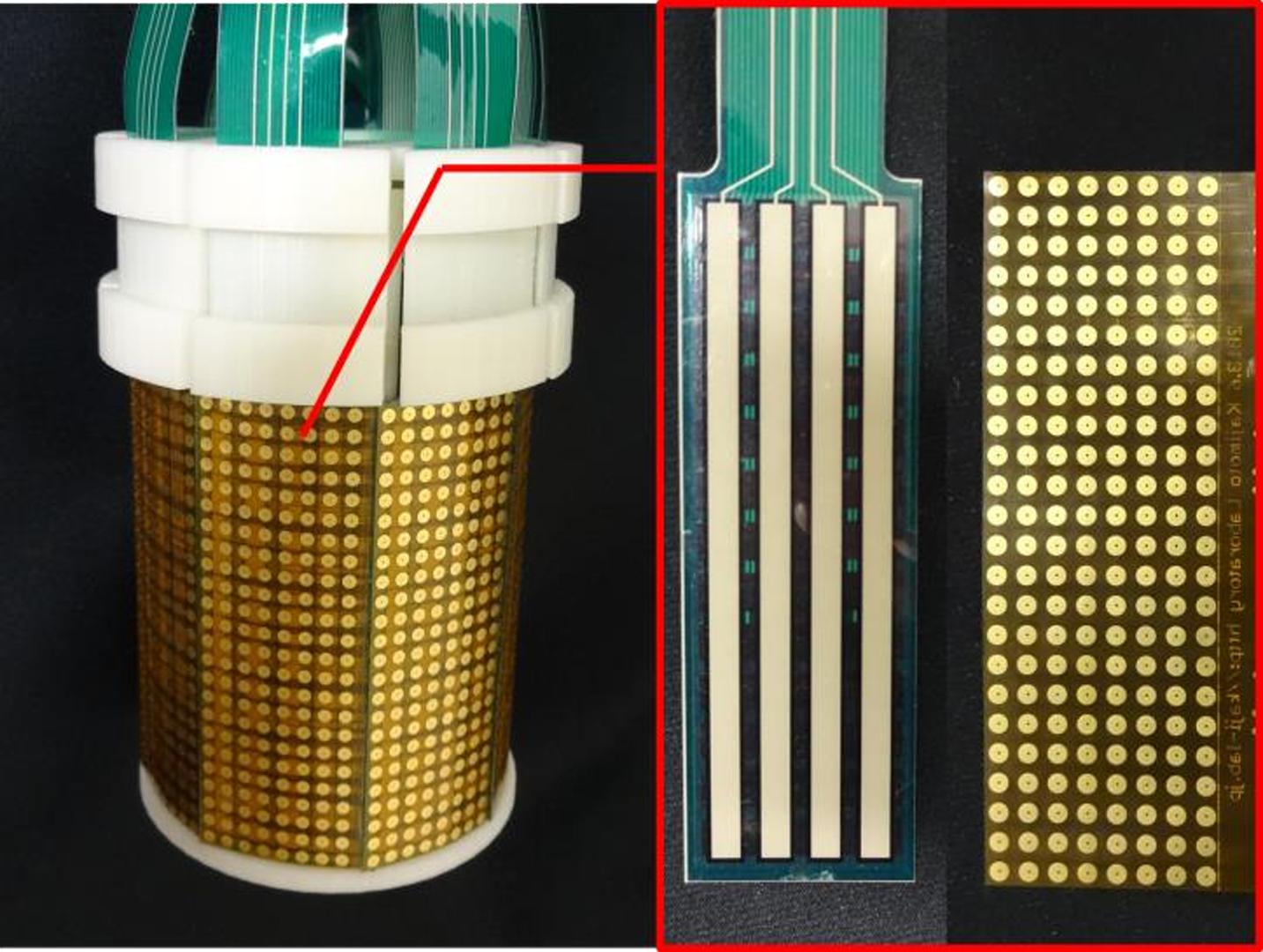
For the intuitive manipulation of teleoperating robot hand and virtual avatar hand (slave hand), tactile feedback is essential. This is especially true when the slave hand interacts with virtual or real objects. Many manipulation devices (master hand) with tactile feedback functionality have been developed [Sato et al., 2007][Sato, 2002][Endo et al., 2009], but the following issues remain to be solved.
References:
[1]
Sato, K., Minamizawa, K., Kawakami, N., Tachi, S. Haptic Telexistence. ACM SIGGRAPH, emerging technologies, 2007.
[2]
Sato, M. Development of String-based Force Display: SPIDER. The 8th International Conference on Virtual Systems and Multi Media, pp.1034–1039. 2002.
[3]
Endo, T., Kawasaki, H., Mouri, T., Doi, Y., Yoshida, T., Ishigure, Y., Shimomura, H., Matsumura, M., Koketsu. Five-Fingered Haptic Interface Robot: HIRO III. World Haptics 2009, pp.458–463, 2009.
[4]
Kajimoto, H. Design of Cylindrical Whole-Hand Haptic Interface Using Electrocutaneous Display. EuroHaptics 2012, pp.67–72, 2012.
[5]
Takei, S., Watanabe, R., Okazaki, R., Hachisu. T., Kajimoto, H. Presentation of Softness Using Film-Type Electro-Tactile Display and Pressure Distribution Measurement. AsiaHaptics 2014, 2014.