
“RobotSketch: An Interactive Showcase of Superfast Design of Legged Robots”
Conference:
Experience Type(s):
Title:
- RobotSketch: An Interactive Showcase of Superfast Design of Legged Robots
Collaborator(s):
Description:
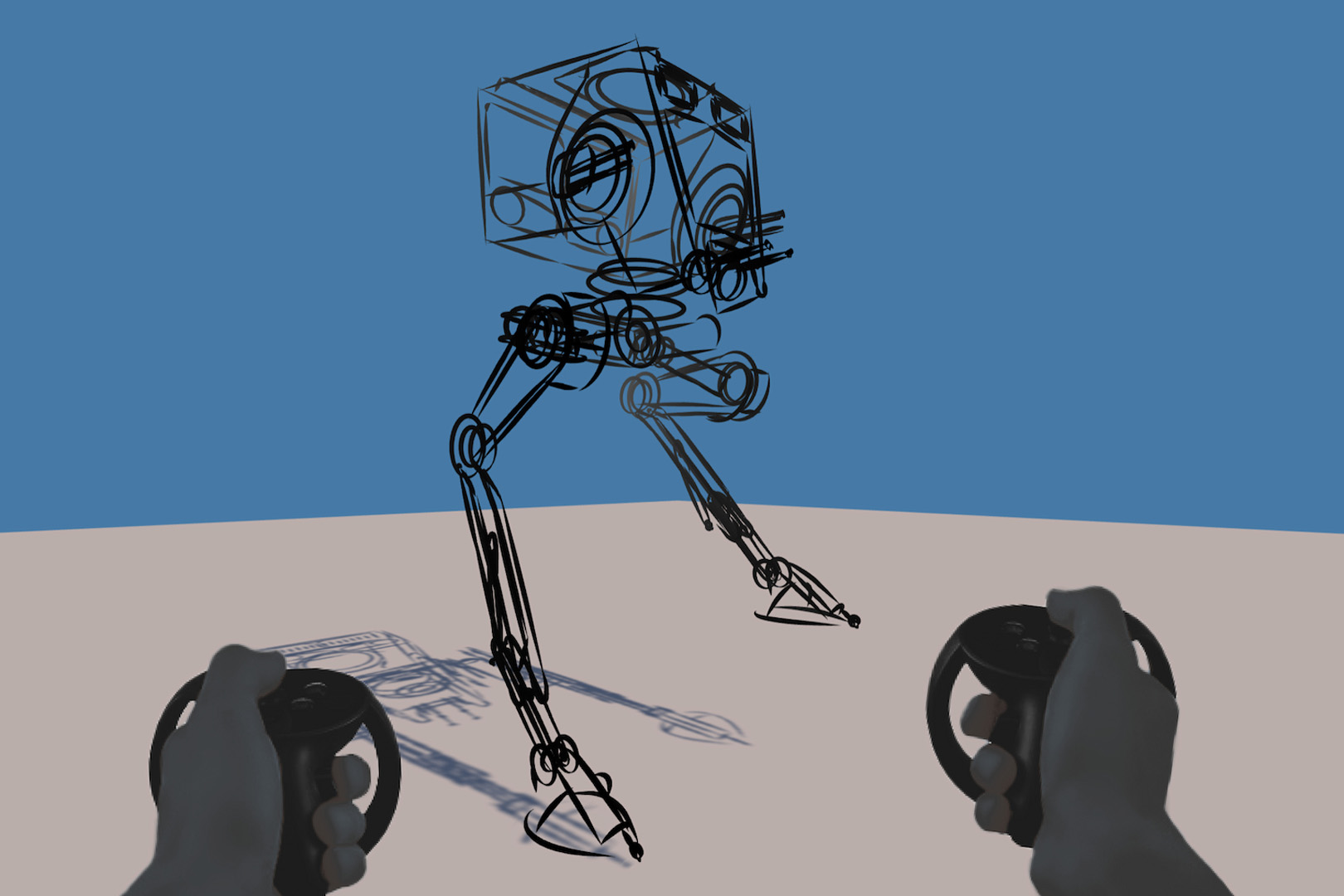
We showcase an interactive system that lets robot designers to directly 3D sketch and experience robots in real scale from an immersive VR workspace. The concept robots learn to walk through reinforcement learning in a physics simulation, allowing the designer to control them in real time using VR controllers.
References:
[1]
Seok-Hyung Bae, Ravin Balakrishnan, and Karan Singh. 2008. ILoveSketch: as-natural-as-possible sketching system for creating 3D curve models. In Proc. UIST ’08. 151–160.
[2]
Tobias Drey, Jan Gugenheimer, Julian Karlbauer, Maximilian Milo, and Enrico Rukzio. 2020. VRSketchIn: exploring the design space of pen and tablet interaction for 3D sketching in virtual reality. In Proc. CHI ’20. Article 501, 14 pages.
[3]
Jemin Hwangbo, Joonho Lee, Alexey Dosovitskiy, Dario Bellicoso, Vassilios Tsounis, Vladlen Koltun, and Marco Hutter. 2019. Learning agile and dynamic motor skills for legged robots. Science Robotics 4, 26 (2019), eaau5872.
[4]
Jemin Hwangbo, Joonho Lee, and Marco Hutter. 2018. Per-contact iteration method for solving contact dynamics. RA-L 3, 2 (2018), 895–902.
[5]
Joon Hyub Lee, Taegyu Jin, Sang-Hyun Lee, Seung-Jun Lee, and Seok-Hyung Bae. 2023. Stereoscopic viewing and monoscopic touching: selecting distant objects in VR through a mobile device. In Proc. UIST ’23. Article 28, 7 pages.
[6]
Joon Hyub Lee, Hanbit Kim, and Seok-Hyung Bae. 2022. Rapid design of articulated objects. Trans. Graph. 41, 4, Article 89 (2022), 8 pages.
[7]
John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. 2017. Proximal policy optimization algorithms. (2017). arxiv:1707.06347
[8]
Donghoon Youm, Hyunsik Oh, Suyoung Choi, Hyeongjun Kim, and Jemin Hwangbo. 2024. Legged robot state estimation with invariant extended Kalman filter using neural measurement network. (2024). arxiv:2402.00366