
“Public Hand: Proximity-Aware Manipulation of Robotic Hand Shared with Multi-User in Robotic Room” by Ohta, Yoshida, Sasaki and Minamizawa
Conference:
Experience Type(s):
Title:
- Public Hand: Proximity-Aware Manipulation of Robotic Hand Shared with Multi-User in Robotic Room
Organizer(s)/Presenter(s):
Interest Areas(s):
- Gaming & Entertainment
- New Technologies
Description:
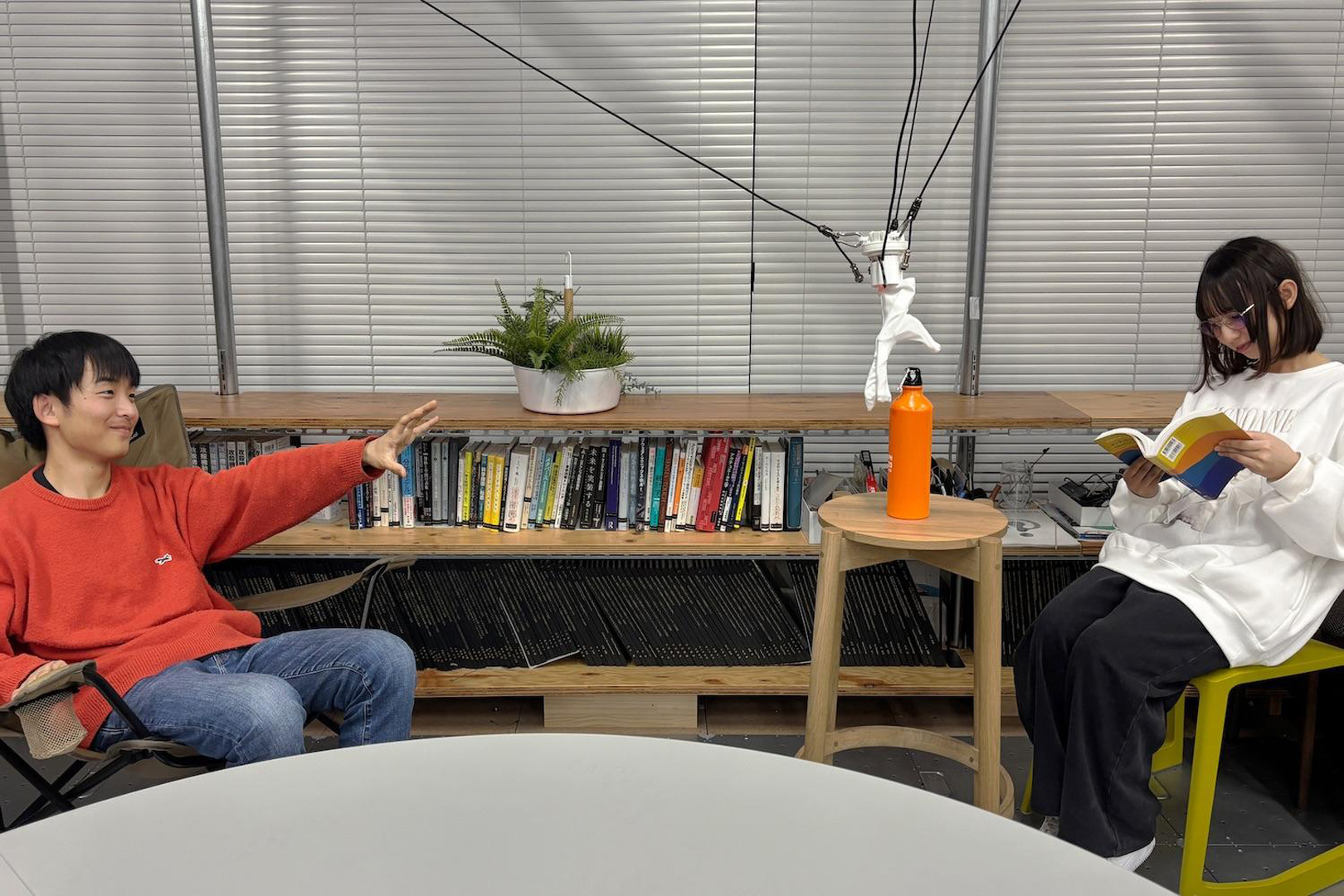
Robotic agents are increasingly appearing in our living spaces and are beginning to serve as partners to human users. While some robotic systems are expected to function autonomously, others are designed to operate under human control or as extensions of human users. This trend has led to a growing demand for effective manipulation methods for such robotic systems. Particularly in public spaces with multiple human users, manipulation methods must be designed to enable dynamic and flexible control while preventing conflicts among users. This study presents Public Hand, a proximity-aware robotic hand designed for shared use in a robotic room. Suspended from the ceiling and cable-driven, Public Hand extends the user’s hand movements, enabling intuitive manipulation. By dynamically adjusting control based on social distance, it allows multiple users to interact naturally without wearable devices, facilitating smooth transitions between users. We introduce the system’s design, control mechanism, and use-case scenarios through demonstration.
References:
[1] Saul Greenberg, Nicolai Marquardt, Till Ballendat, Rob Diaz-Marino, and Miaosen Wang. 2011. Proxemic interactions: the new ubicomp?interactions 18, 1 (2011), 42–50.
[2] Tomoya Sasaki, MHD Yamen Saraiji, Charith Lasantha Fernando, Kouta Minamizawa, and Masahiko Inami. 2017. MetaLimbs: Multiple arms interaction metamorphism. In ACM SIGGRAPH 2017 emerging technologies. 1–2.
[3] Tomomasa Sato, Yoshifumi Nishida, and Hiroshi Mizoguchi. 1996. Robotic room: Symbiosis with human through behavior media. Robotics and autonomous systems 18, 1-2 (1996), 185–194.