
“Perception-based High Definition Haptic Rendering” by Susa, Ikeda, Tokizaki, Mitake, Sato, et al. …
Conference:
Experience Type(s):
Title:
- Perception-based High Definition Haptic Rendering
Entry Number: 32
Organizer(s)/Presenter(s):
Description:
Haptic perception is essential for dexterous object manipulation in both real and virtual world. Recently, haptic interaction is being researched for manipulation in virtual environment.
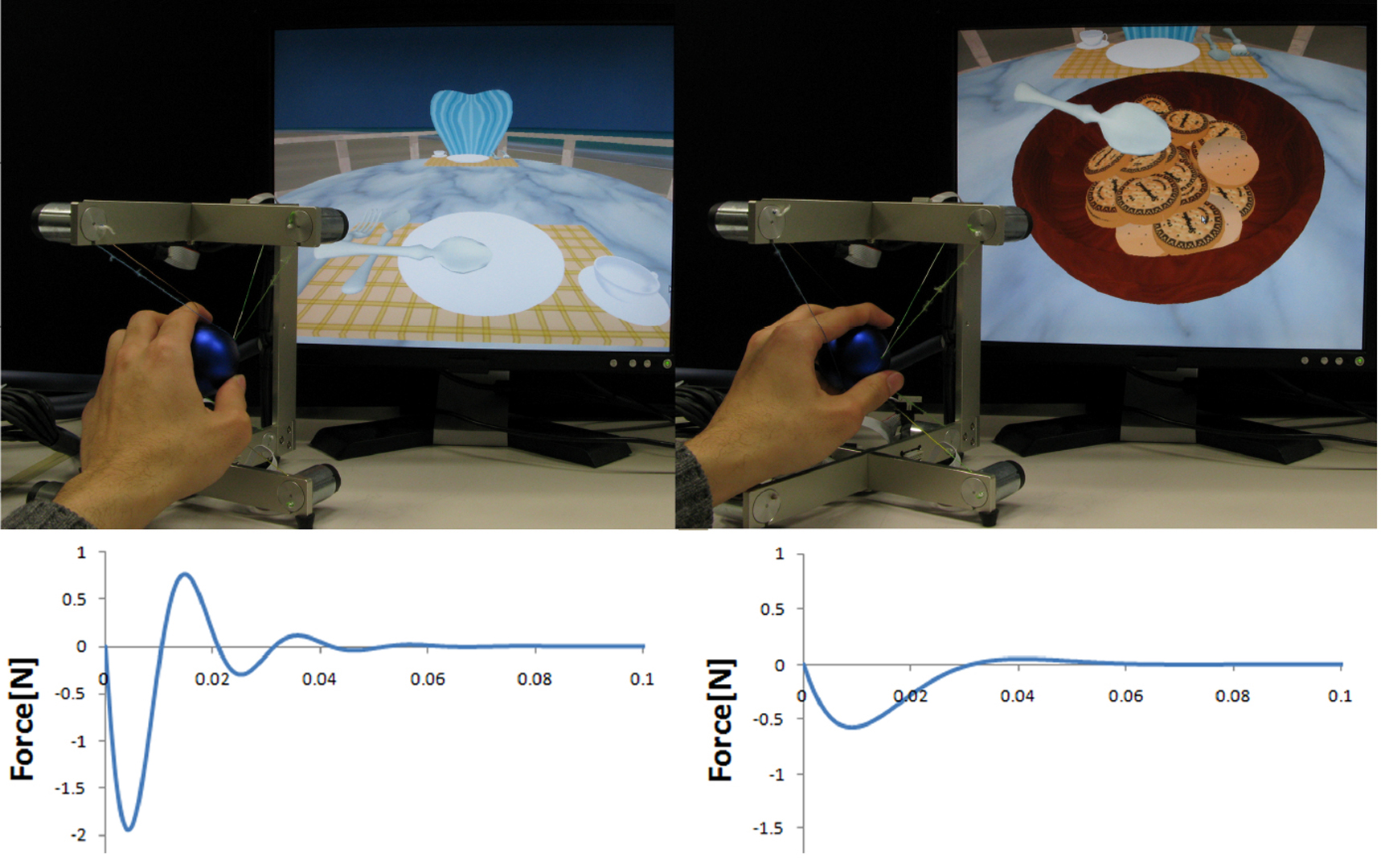
Conventional haptic rendering employs penalty method which calculates feedback forces using only spring-damper model [Ruspini et al. 1997]. High frequency (1 kHz-) simulation is required for stable control over haptic interfaces for meaningful haptic interactions. However, high frequency simulation tends to cause overflow of computational quantity and make simulation for virtual worlds in large scale difficult.
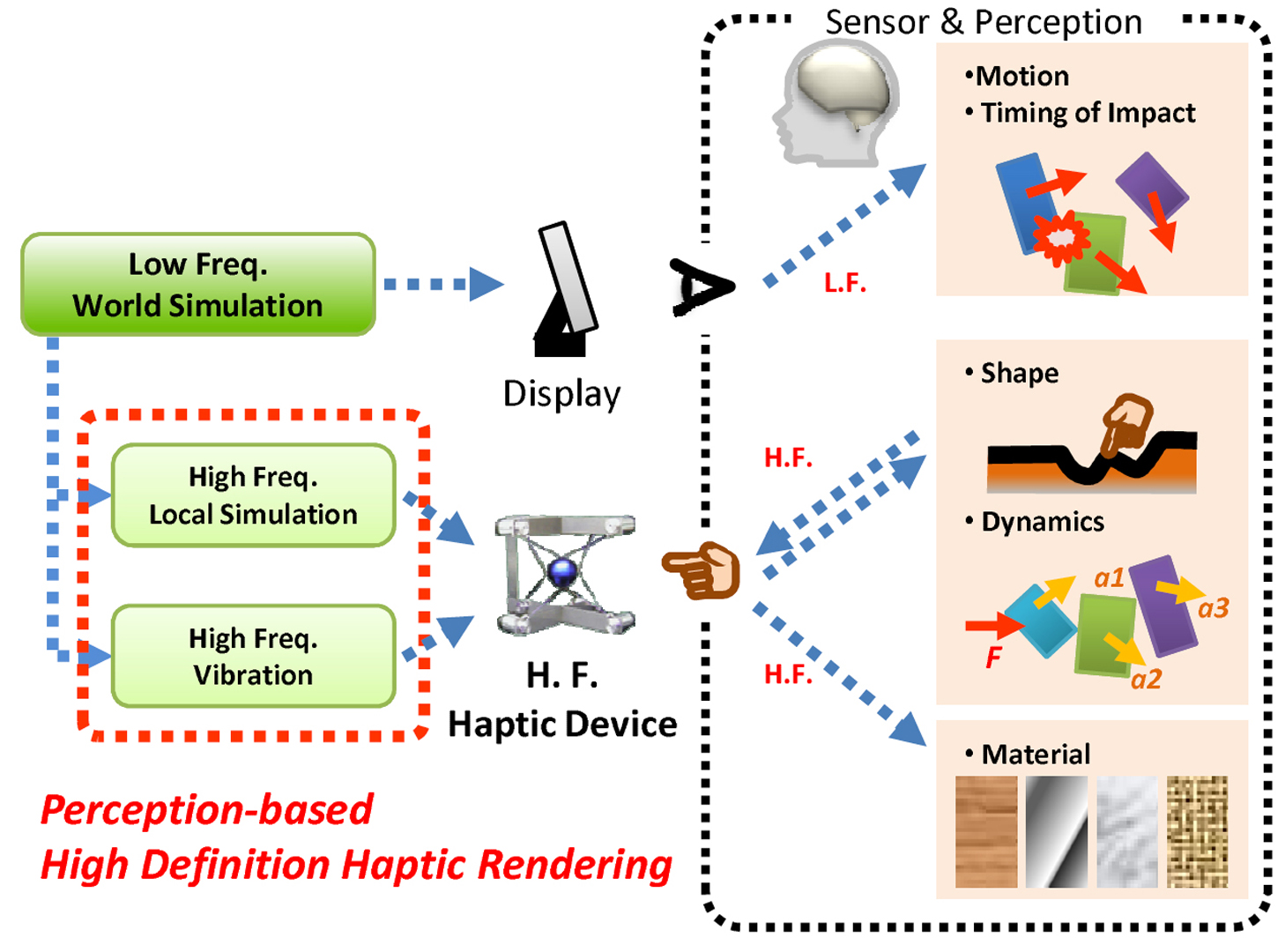
Perception-based High Definition Haptic Rendering (Perception-based HDHR) calculates feedback forces regarding not only physical law but also nature of human perception. This rendering is make possible using haptic interfaces whose frequencies are around 1 kHz and physical simulators based on analytical methods. Consequently, Perception-based HDHR presents rich haptic perception for large scale virtual worlds (Fig.1).
Other Information:
References
OKAMURA, A. M., DENNERLEIN, J. T., AND CUTKOSKY, M. R. 2001. Reality-based models for vibration feedback in virtual environments. ASME/IEEE Transactions on Mechatronics 6, 3.
RUSPINI, D. C., KOLAROV, K., AND KHATIB, O. 1997. The haptic display of complex graphical environments. In Proc. of SIGGRAPH 97 Computer Graphics, ACM SIGGRAPH, 345– 352.
Keyword(s):
- haptic rendering
- force feedback
- rigid-body simulation