
“Parasitic Finger: Coexistence with Artificial Organism” by Nakayasu, Sakaguchi and Shibasaki
Conference:
Experience Type(s):
Title:
- Parasitic Finger: Coexistence with Artificial Organism
Organizer(s)/Presenter(s):
Interest Areas(s):
- Art / Design
- Research / Education
Description:
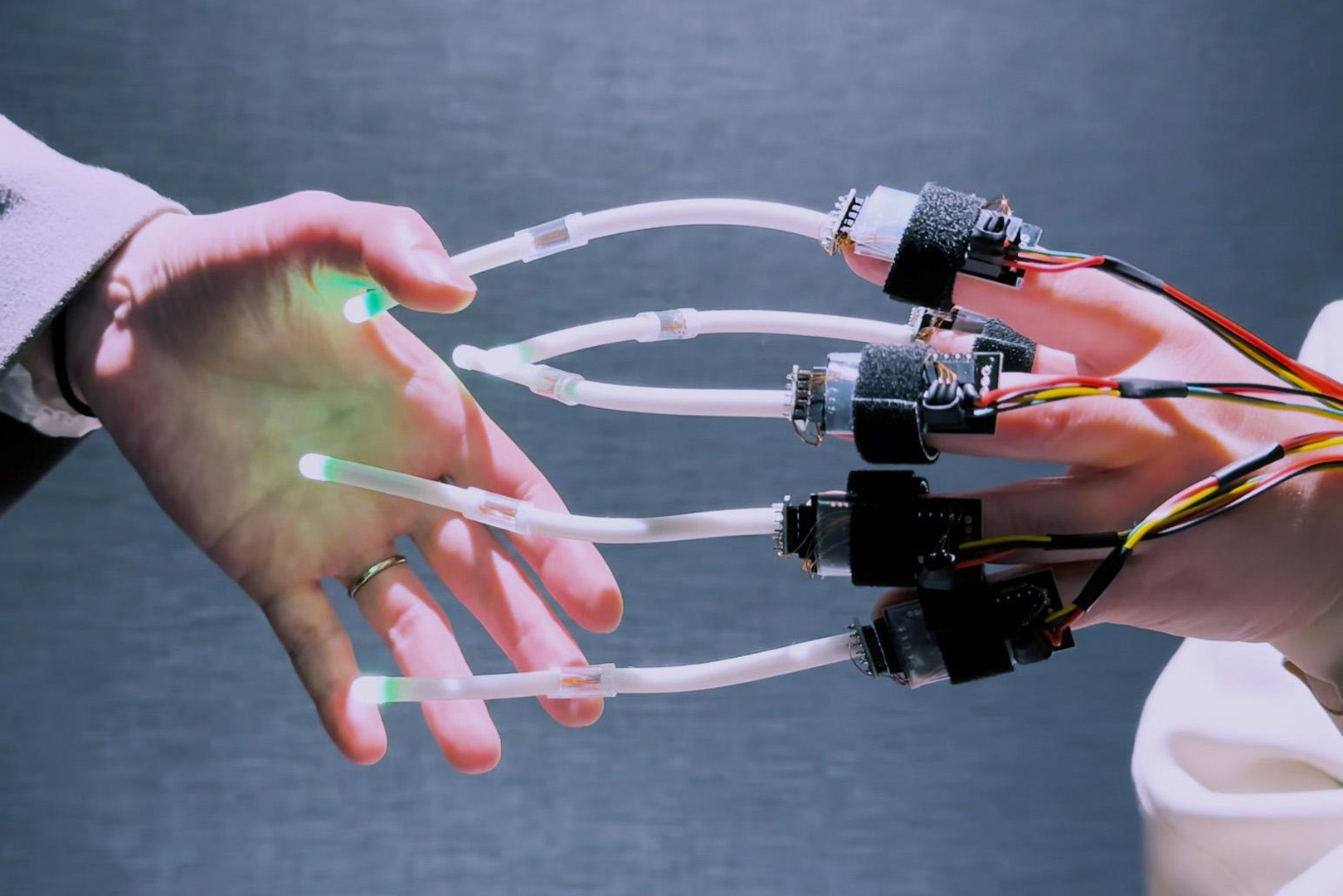
The Parasitic Finger project explores how humans coexist with uncontrollable finger augmentation with an SMA actuator. What would happen if our fingers, which we use freely in daily life, could move in unrealistic ways, independent of our will? The user may try to use their extended fingers in some way, even if they aren’t handling them well. They may sense another creature inside and feel an urge to engage with or care for it. The finger actuator unit weighs just 5 grams and is lightweight, making it comfortable to wear on the fingertips. By regulating the heat of the SMA wires, the SMA actuator can bend in four directions. Unlike human finger joints, they move like tentacles, performing actions such as waving and touching objects. We designed the finger movements so that participants would feel a sense of biological agency or animacy.
References:
[1] Guillaume GOURMELEN, Adrien Verhulst, Benjamin Navarro, Tomoya Sasaki, Ganesh Gowrishankar, and Masahiko Inami. 2019. Co-Limbs: An Intuitive Collaborative Control for Wearable Robotic Arms. In SIGGRAPH Asia 2019 Emerging Technologies (Brisbane, QLD, Australia) (SA ’19). Association for Computing Machinery, New York, NY, USA, 9–10. https://doi.org/10.1145/3355049.3360526
[2] Asuka Minami, Hideyuki Takahashi, Yoshihiro Nakata, Hidenobu Sumioka, and Hiroshi Ishiguro. 2021. The Neighbor in My Left Hand: Development and Evaluation of an Integrative Agent System With Two Different Devices. IEEE Access 9 (2021), 98317–98326. https://doi.org/10.1109/ACCESS.2021.3095592
[3] Junichi Nabeshima, MHD Yamen Saraiji, and Kouta Minamizawa. 2019. Arque: artificial biomimicry-lnspired tail for extending innate body functions. In ACM SIGGRAPH 2019 Emerging Technologies (Los Angeles, California) (SIGGRAPH ’19). Association for Computing Machinery, New York, NY, USA, Article 8, 2 pages. https://doi.org/10.1145/3305367.3327987
[4] Akira Nakayasu. 2020. Animated robotic sculptures: using SMA motion display to create lifelike movements. In ACM SIGGRAPH 2020 Art Gallery (Virtual Event, USA) (SIGGRAPH ’20). Association for Computing Machinery, New York, NY, USA, 419–423. https://doi.org/10.1145/3386567.3388572
[5] Jun Nishida, Soichiro Matsuda, Hiroshi Matsui, Shan-Yuan Teng, Ziwei Liu, Kenji Suzuki, and Pedro Lopes. 2020. HandMorph: a Passive Exoskeleton that Miniaturizes Grasp. In Proceedings of the 33rd Annual ACM Symposium on User Interface Software and Technology (Virtual Event, USA) (UIST ’20). Association for Computing Machinery, New York, NY, USA, 565–578. https://doi.org/10.1145/3379337.3415875
[6] Nami Ogawa, Yuki Ban, Sho Sakurai, Takuji Narumi, Tomohiro Tanikawa, and Michitaka Hirose. 2016. Metamorphosis Hand: Dynamically Transforming Hands. In Proceedings of the 7th Augmented Human International Conference 2016 (Geneva, Switzerland) (AH ’16). Association for Computing Machinery, New York, NY, USA, Article 51, 2 pages. https://doi.org/10.1145/2875194.2875246
[7] Stelarc. 1980. THE THIRD HAND. Retrieved February 10, 2025 from http://stelarc.org/_.php#page/2
[8] Anouk Wipprecht. 2015. Robotic Spider Dress. Retrieved February 10, 2025 from https://vimeo.com/114828162