
“NAVIgoid: Robot Navigation with Haptic Vision”
Conference:
Experience Type(s):
Title:
- NAVIgoid: Robot Navigation with Haptic Vision
Organizer(s)/Presenter(s):
Description:
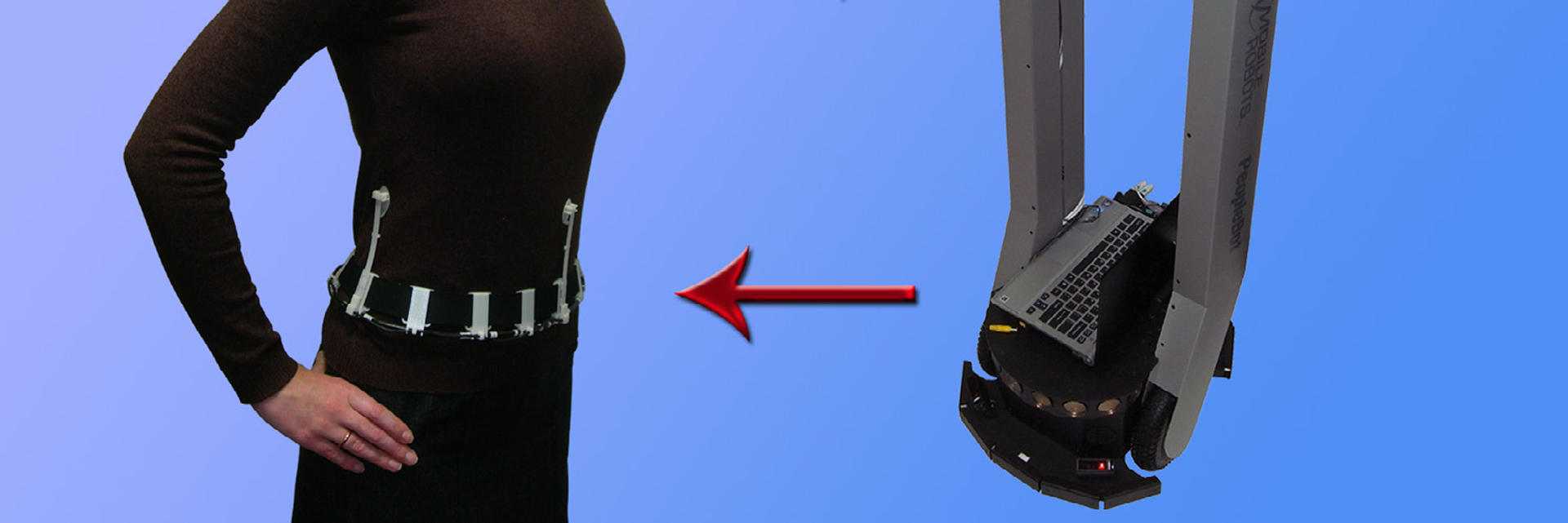
Telepresence robotic system allows a person to feel as if they were present at a place other than their true location. The sense of telexistence is provided with such stimuli as vision, hearing, sense of touch, etc. [1]. The user of such system is capable of affecting the remote location, and hence, the user position and actions must be sensed and transmitted to the remote robot (teleoperation).
References:
[1]
Tachi, S. 2009. Telexistence. World Scientific Pub. Co., Singapore.
Digital Library
Google Scholar
[2]
Cho, S. K., Jin, H. Z., Lee, J. Yao, B. 2010. Teleoperation of a Mobile Robot using a Force-Reflection Joystick with Sensing Mechanism of Rotating Magnetic Field, IEEE/ASME Transactions on Mechatronics, 15(1): 17–26, Feb. 2010.
ACM Digital Library Publication:
Overview Page:
Submit a story:
If you would like to submit a story about this experience or presentation, please contact us: historyarchives@siggraph.org