
“HumanConQuad: Human Motion Control of Quadrupedal Robots using Deep Reinforcement Learning” by Kim, Sorokin, Lee and Ha
Conference:
Experience Type(s):
Title:
- HumanConQuad: Human Motion Control of Quadrupedal Robots using Deep Reinforcement Learning
Organizer(s)/Presenter(s):
Description:
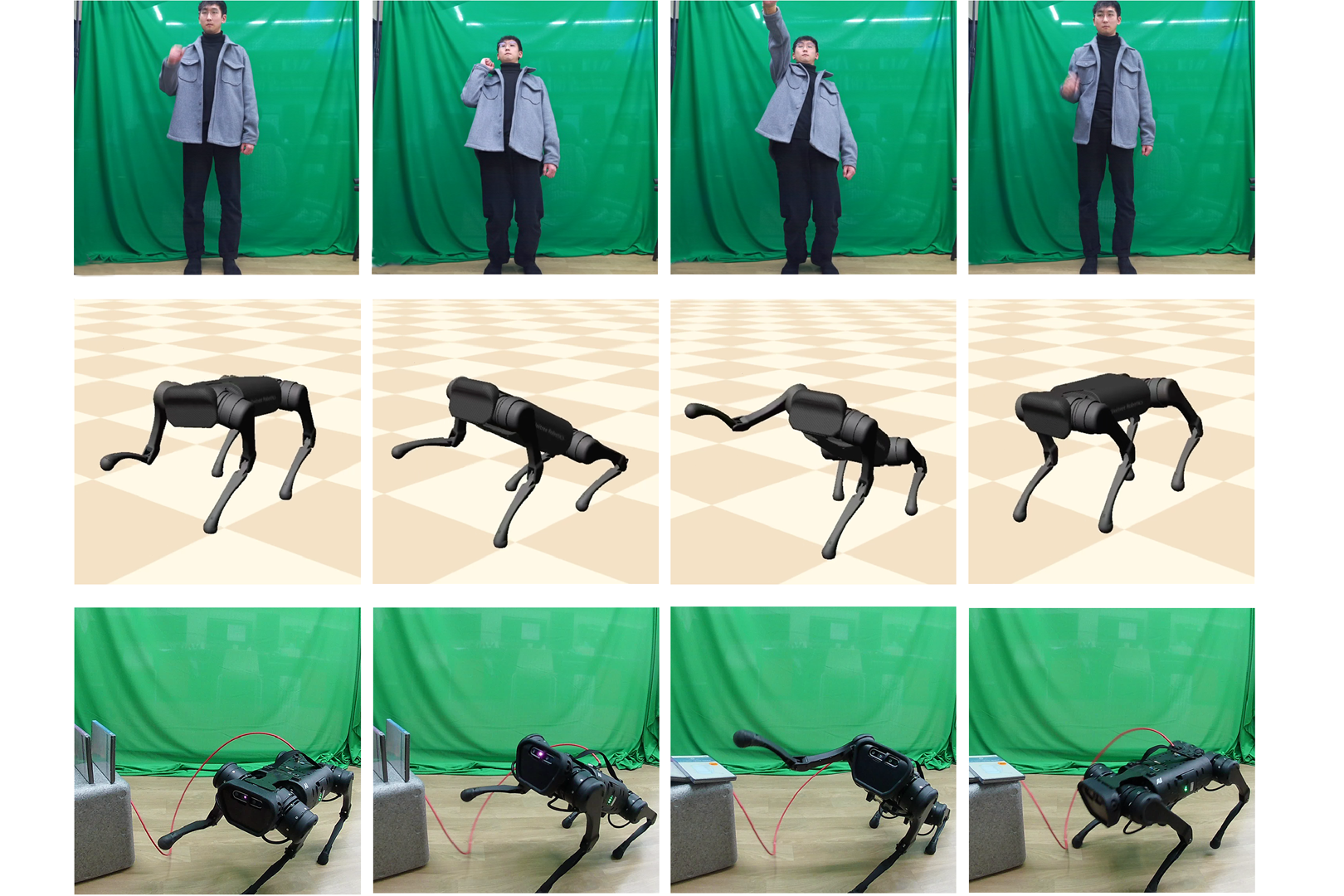
Robotic creatures are capable of entering hazardous environments instead of human workers, but it is challenging to develop a fully autonomous agent that can work independently in unstructured scenes. We propose a human motion-based control interface for quadrupedal robots that promises adaptable robot operations by reflecting the user’s intuition directly to the robot’s movements. Designing motion interface for different morphologies conveys tricky problems in solving dynamics and control strategies. We first retarget the captured human motion into the corresponding robot’s kinematic space with proper semantics using supervised learning and post-processing techniques. Second, we build the motion imitation controller to track the given retargeted motion using deep reinforcement learning with task-based curriculums. Finally, we apply domain randomization during training for real-world deployment. (Video1)
References:
[1] Sungjoon Choi, Min Jae Song, Hyemin Ahn, and Joohyung Kim. 2021. Self-Supervised Motion Retargeting with Safety Guarantee. In 2021 IEEE International Conference on Robotics and Automation (ICRA). 8097–8103.
[2] Xue Bin Peng, Pieter Abbeel, Sergey Levine, and Michiel van de Panne. 2018. DeepMimic: Example-guided Deep Reinforcement Learning of Physics-based Character Skills. ACM Trans. Graph. 37, 4, Article 143 (July 2018), 14 pages.
[3] M. H. Raibert. 1984. Hopping in legged systems — Modeling and simulation for the two-dimensional one-legged case. IEEE Transactions on Systems, Man, and Cybernetics SMC-14, 3(1984), 451–463.
[4] Katsu Yamane, Yuka Ariki, and Jessica Hodgins. 2010. Animating non-humanoid characters with human motion data. In Proceedings of the 2010 ACM SIGGRAPH/Eurographics Symposium on Computer Animation. 169–178.