
“DroneStick: Flying Joystick as a Novel Type of Interface” by Tsykunov, Fedoseev, Dorzhieva, Agishev, Ibrahimov, et al. …
Conference:
Experience Type(s):
Title:
- DroneStick: Flying Joystick as a Novel Type of Interface
Organizer(s)/Presenter(s):
Description:
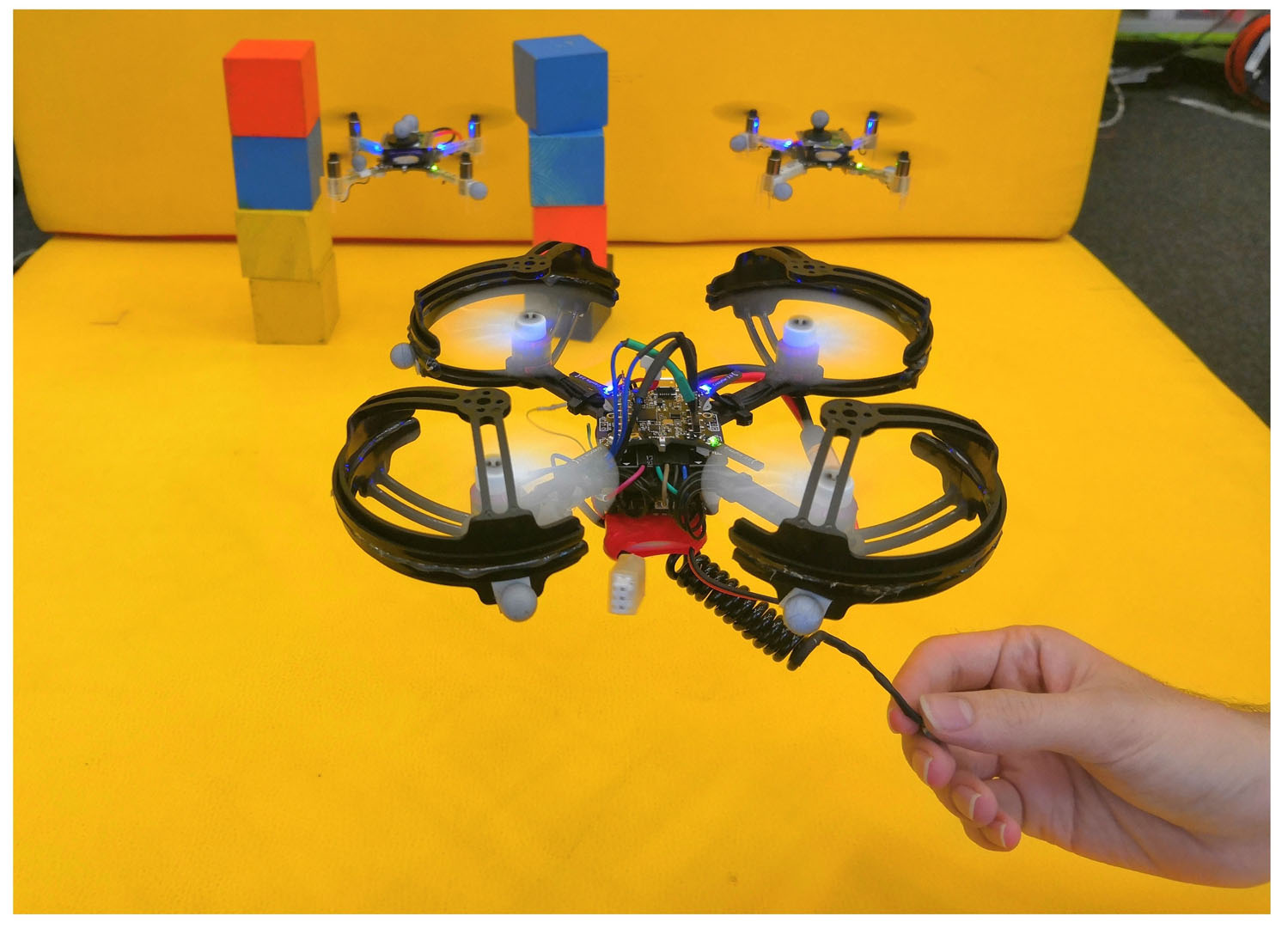
DroneStick is a novel hands-free method for smooth interaction between a human and a robotic system via one of its agents. A flying joystick (DroneStick) being a part of a multi-robot system is composed of a flying drone and coiled wire with a vibration motor.
References:
[1] Sean Braley, Calvin Rubens, Timothy Merritt, and Roel Vertegaal. 2018. GridDrones: A Self-Levitating Physical Voxel Lattice for Interactive 3D Surface Deformations. In Proceedings of the 31st Annual ACM Symposium on User Interface Software and Technology (Berlin, Germany) (UIST ’18). Association for Computing Machinery, New York, NY, USA, 87–98. https://doi.org/10.1145/3242587.3242658
[2] Antonio Gomes, Calvin Rubens, Sean Braley, and Roel Vertegaal. 2016. BitDrones: Towards Using 3D Nanocopter Displays as Interactive Self-Levitating Programmable Matter. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems (San Jose, California, USA) (CHI ’16). Association for Computing Machinery, New York, NY, USA, 770–780. https://doi.org/10.1145/2858036.2858519
[3] Gaëtan Podevijn, Rehan O’Grady, Youssef S. G. Nashed, and Marco Dorigo. 2014. Gesturing at Subswarms: Towards Direct Human Control of Robot Swarms. In Towards Autonomous Robotic Systems, Ashutosh Natraj, Stephen Cameron, Chris Melhuish, and Mark Witkowski (Eds.). Springer Berlin Heidelberg, 390–403.
[4] E. Tsykunov, L. Labazanova, A. Tleugazy, and D. Tsetserukou. 2018. SwarmTouch: Tactile Interaction of Human with Impedance Controlled Swarm of Nano-Quadrotors. In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 4204–4209. https://doi.org/10.1109/IROS.2018.8594424
[5] Dingjiang Zhou, Zijian Wang, and Mac Schwager. 2018. Agile Coordination and Assistive Collision Avoidance for Quadrotor Swarms Using Virtual Structures. IEEE Transactions on Robotics 34, 4 (2018), 916–923. https://doi.org/10.1109/TRO.2018.2857477