
“Copycat Arm” by Hoshino, Tomida and Tamaki
Conference:
Experience Type(s):
Title:
- Copycat Arm
Entry Number: 11
Organizer(s)/Presenter(s):
Description:
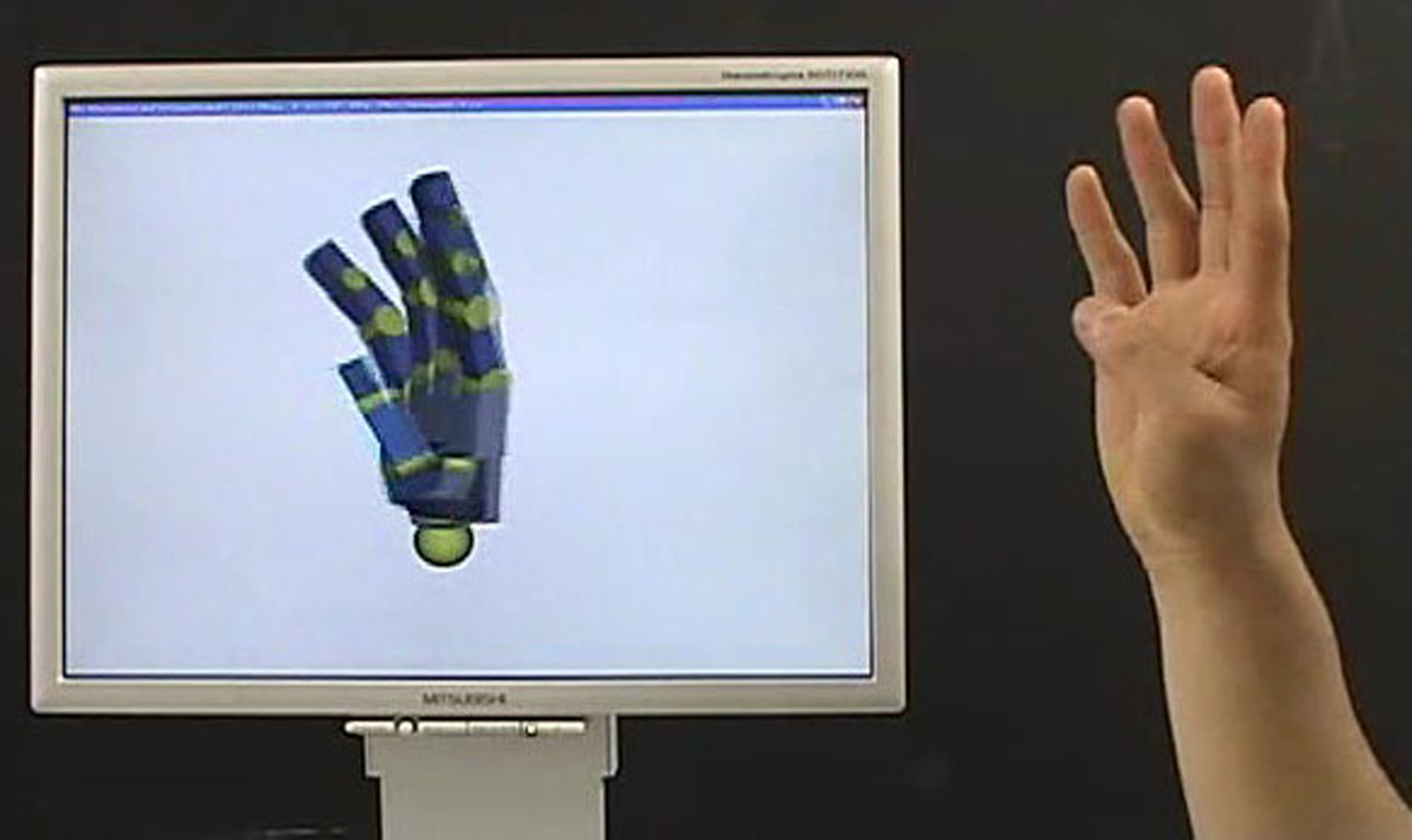
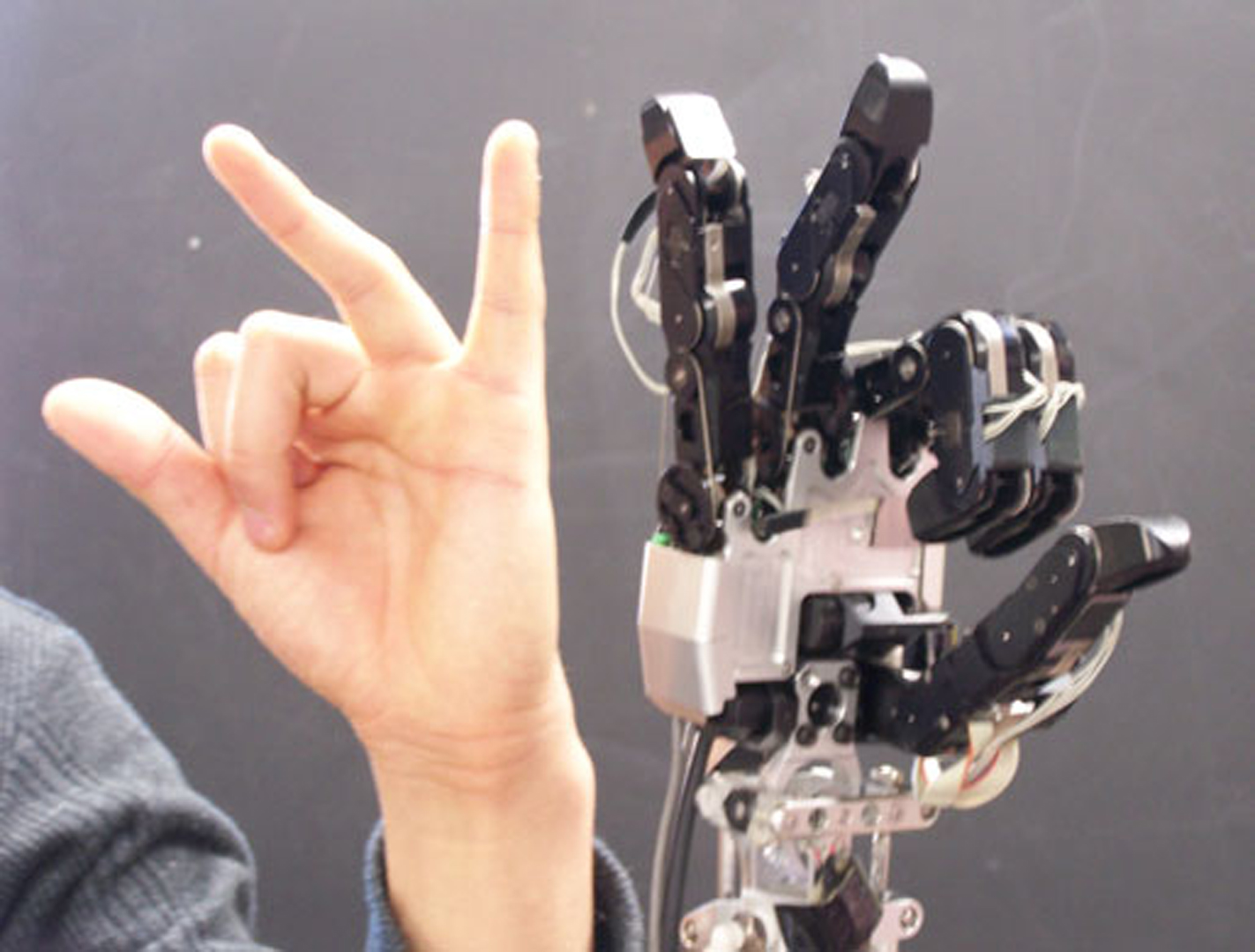
The proposed system is capable of estimating the “shape or posture of the human hand” with a high speed and accuracy by means of a single high-speed camera, regardless of the differences among individuals, such as finger size, length of the bones, skin color, and state of creases, as well as differences in the lighting environments. In addition, this system can also estimate the accurate posture of a hand performing three-dimensional motions such as rotations of the wrist and shoulder by using a single camera, without having to install multiple cameras surrounding the hand, i.e., the object to be photographed. The error in the estimation is approximately 5 to 6 degrees in the finger joint angle, thus achieving an accuracy level almost identical to that of the conventional technology. This system realizes a processing speed of more than 100 fps, even when a single notebook personal computer with ordinary specifications is used.
Our research group made an exhibit of a “Copycat Hand” [1]–[2] at Siggraph Emerging Technologies in 2006. Although this system achieved a high processing speed of 150-160 fps, it could not necessarily make an accurate estimation of the motions of the fingers during three-dimensional motions such as rotations of the wrist and shoulder. In other words, a very low accuracy was achieved in the estimation of the hand posture when the palm of the user was aligned sideways with respect to the camera or when the user performed waving motions, for example, saying ‘good-bye.’ On the other hand, the “Copycat Arm” introduced this year can estimate the posture of a hand with high accuracy, even if the user moves his hand or arm freely before a high-speed camera. The secret lies in saving the contour information of a large number of hand shapes in advance in a database; this enables us to identify similar images among unknown images (this function was also adopted for “Copycat Hand”). Further, it is also advantageous to save the “slenderness ratio” of the hand images in the database and to hierarchically rearrange the data set of the database in advance, depending on the degree of similitude. If one practices gymnastics or dances in front of a high-speed camera, the “Copycat Arm” imitates the motions of the person’s upper limbs without delay so that he/she can enjoy interactive communications with it. Therefore, this system is also known as the “Aping Arm.”