
“FluidicSwarm: Embodiment of Swarm Robots Using Fluid Behavior Imitation” by Eguchi, Yoshida, Nishimura and Hiraki
Conference:
Experience Type(s):
Title:
- FluidicSwarm: Embodiment of Swarm Robots Using Fluid Behavior Imitation
Organizer(s)/Presenter(s):
Interest Areas(s):
- New Technologies
- Research / Education
Description:
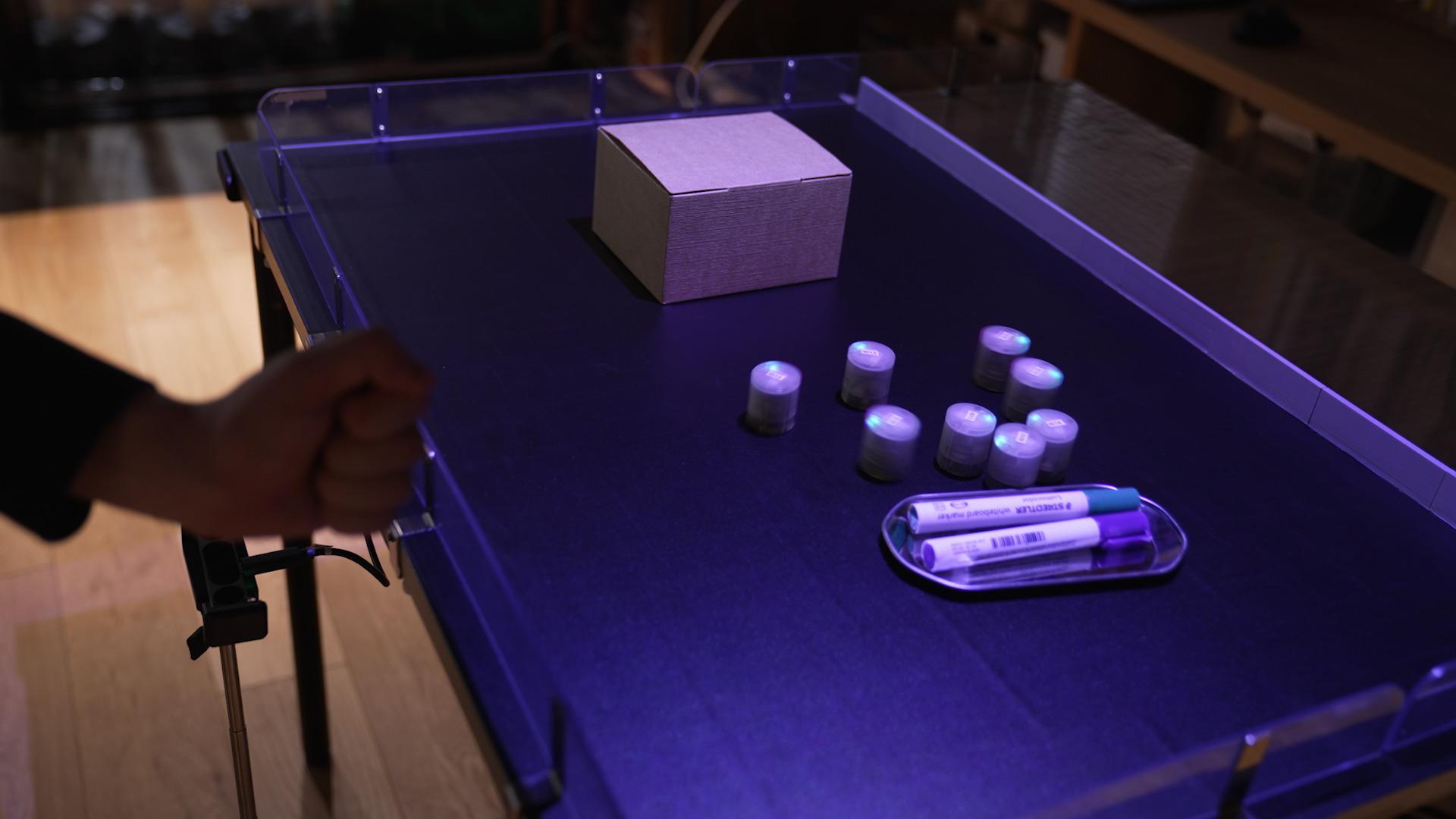
This paper introduces “FluidicSwarm,” a swarm robot control system that enhances the operability of swarm robots by embodying fluid-like swarm robots as an extension of the user’s body. In FluidicSwarm, users can easily manipulate the characteristics of the fluid through hand movements, changing the shape and flexibility of the swarm robot formation. This capability enables the efficient execution of various tasks, such as obstacle avoidance and object transportation, and simplifies the swarm robot arrangement problem in shape representation. Consequently, users can operate swarm robots with greater efficiency in a variety of environments, markedly enhancing the quality of swarm robot control experiences, including teleoperation and remote collaboration.
References:
[1] Michikuni Eguchi, Mai Nishimura, Shigeo Yoshida, and Takefumi Hiraki. 2024. Robot Swarm Control Based on Smoothed Particle Hydrodynamics for Obstacle-Unaware Navigation. In 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems. 9006–9013.
[2] Sosuke Ichihashi, So Kuroki, Mai Nishimura, Kazumi Kasaura, Takefumi Hiraki, Kazutoshi Tanaka, and Shigeo Yoshida. 2024. Swarm Body: Embodied Swarm Robots. In Proceedings of the 2024 CHI Conference on Human Factors in Computing Systems. Article 267, 19 pages.
[3] Keiichi Ihara, Mehrad Faridan, Ayumi Ichikawa, Ikkaku Kawaguchi, and Ryo Suzuki. 2023. HoloBots: Augmenting Holographic Telepresence with Mobile Robots for Tangible Remote Collaboration in Mixed Reality. In Proceedings of the 36th Annual ACM Symposium on User Interface Software and Technology. Article 119, 12 pages.
[4] Mathieu Le Goc, Lawrence H. Kim, Ali Parsaei, Jean-Daniel Fekete, Pierre Dragicevic, and Sean Follmer. 2016. Zooids: Building Blocks for Swarm User Interfaces. In Proceedings of the 29th Annual Symposium on User Interface Software and Technology. 97–109.