
“Exact 3D Path Generation via 3D Cam-Linkage Mechanisms” by Cheng, Song, Lu, Jie, Chew, et al. …
Conference:
Type(s):
Title:
- Exact 3D Path Generation via 3D Cam-Linkage Mechanisms
Session/Category Title:
- Shape Generation
Presenter(s)/Author(s):
Abstract:
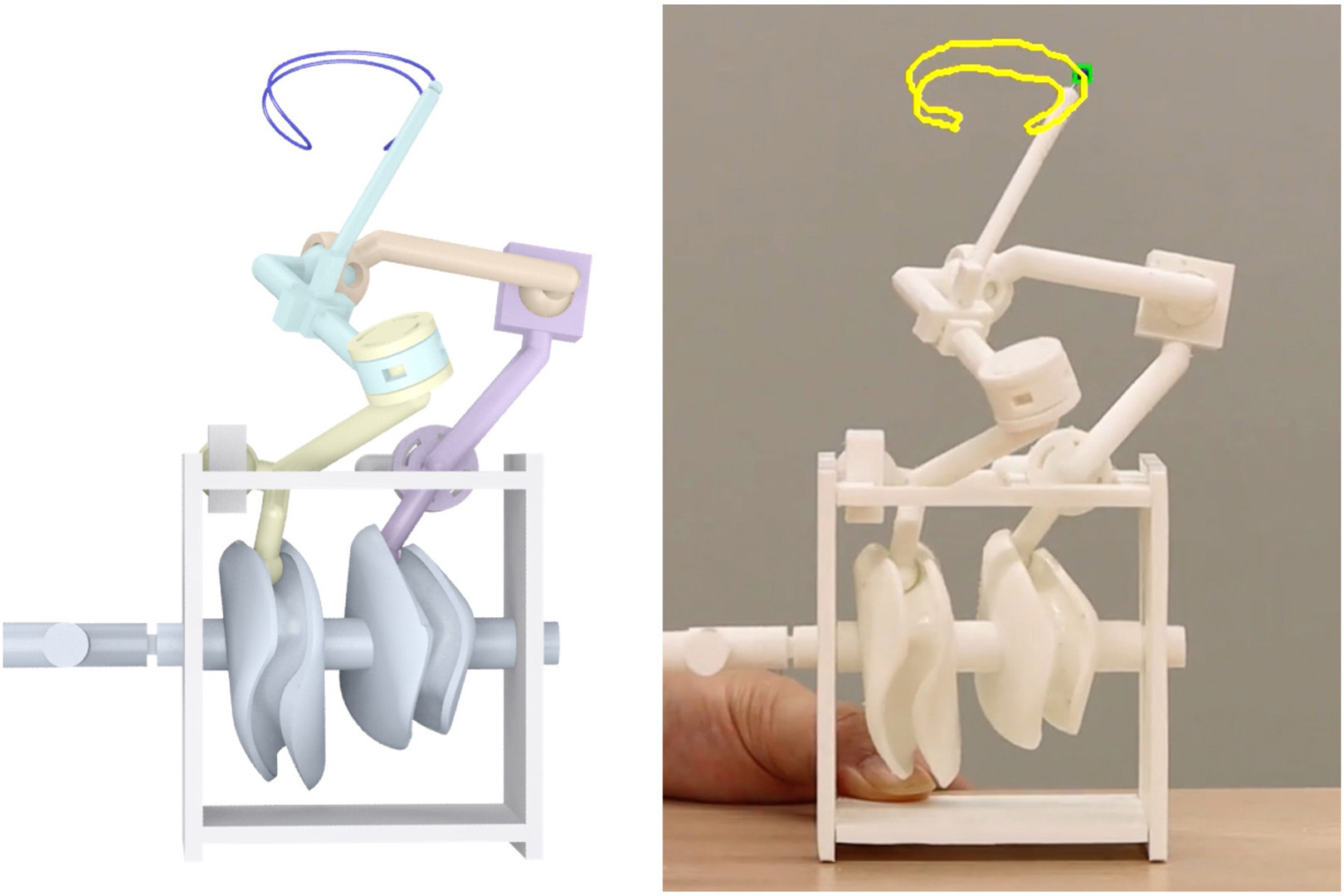
Exact 3D path generation is a fundamental problem of designing a mechanism to make a point exactly move along a prescribed 3D path, driven by a single actuator. Existing mechanisms are insufficient to address this problem. Planar linkages and their combinations with gears and/or plate cams can only generate 2D paths while 1-DOF spatial linkages can only generate 3D paths with rather simple shapes. In this paper, we present a new 3D cam-linkage mechanism, consisting of two 3D cams and five links, for exactly generating a continuous 3D path. To design a 3D cam-linkage mechanism, we first model a 3-DOF 5-bar spatial linkage to exactly generate a prescribed 3D path and then reduce the spatial linkage’s DOFs from 3 to 1 by composing the linkage with two 3D cam-follower mechanisms. Our computational approach optimizes the 3D cam-linkage mechanism’s topology and geometry to minimize the mechanism’s total weight while ensuring smooth, collision-free, and singularity-free motion. We show that our 3D cam-linkage mechanism is able to exactly generate a continuous 3D path with arbitrary shape and a finite number of C0 points, evaluate the mechanism’s kinematic performance with 3D printed prototypes, and demonstrate that the mechanism can be generalized for exact 3D motion generation.
References:
1. Moritz Bächer, Stelian Coros, and Bernhard Thomaszewski. 2015. LinkEdit: Interactive Linkage Editing using Symbolic Kinematics. ACM Trans. on Graph. (SIGGRAPH) 34, 4 (2015), 99:1–99:8.
2. Shaoping Bai, Zhongyi Li, and Jorge Angeles. 2022. Exact Path Synthesis of RCCC Linkages for a Maximum of Nine Prescribed Positions. Journal of Mechanisms and Robotics 14, 2 (2022), 021011:1–021011:8.
3. Gaurav Bharaj, Stelian Coros, Bernhard Thomaszewski, James Tompkin, Bernd Bickel, and Hanspeter Pfister. 2015. Computational Design of Walking Automata. In Proc. ACM SIGGRAPH/Eurographics Symp. on Computer Animation. 93–100.
4. Duygu Ceylan, Wilmot Li, Niloy J. Mitra, Maneesh Agrawala, and Mark Pauly. 2013. Designing and Fabricating Mechanical Automata from Mocap Sequences. ACM Trans. on Graph. (SIGGRAPH Asia) 32, 6 (2013), 186:1–186:11.
5. Yingjie Cheng, Yucheng Sun, Peng Song, and Ligang Liu. 2021. Spatial-Temporal Motion Control via Composite Cam-follower Mechanisms. ACM Trans. on Graph. (SIGGRAPH Asia) 40, 6 (2021), 270:1–270:15.
6. Jinkui Chu and Jianwei Sun. 2010. A New Approach to Dimension Synthesis of Spatial Four-Bar Linkage Through Numerical Atlas Method. Journal of Mechanisms and Robotics 2, 4 (2010), 041004:1–041004:14.
7. Wen-Yeuan Chung. 2015. Synthesis of Spatial Mechanism UR-2SS for Path Generation. Journal of Mechanisms and Robotics 7, 4 (2015), 041009:1–041009:9.
8. Stelian Coros, Bernhard Thomaszewski, Gioacchino Noris, Shinjiro Sueda, Moira Forberg, Robert W. Sumner, Wojciech Matusik, and Bernd Bickel. 2013. Computational Design of Mechanical Characters. ACM Trans. on Graph. (SIGGRAPH) 32, 4 (2013), 83:1–83:12.
9. Clement Gosselin and Jorge Angeles. 1990. Singularity Analysis of Closed-loop Kinematic Chains. IEEE Transactions on Robotics and Automation 6, 3 (1990), 281–290.
10. Alec Jacobson, Daniele Panozzo, et al. 2018. libigl: A Simple C++ Geometry Processing Library. https://libigl.github.io/.
11. F. J. Kay and R. E. Haws. 1975. Adjustable Mechanisms for Exact Path Generation. Journal of Engineering for Industry 97, 2 (1975), 702–707.
12. James Kennedy and Russell Eberhart. 1995. Particle Swarm Optimization. In Proc. Int. Conf. on Neural Networks. 1942–1948.
13. Z. Li, G. Nawratil, F. Rist, and M. Hensel. 2020. Invertible Paradoxic Loop Structures for Transformable Design. Comp. Graph. Forum (Eurographics) 39, 2 (2020), 261–275.
14. Wenrui Liu, Jianwei Sun, and Jinkui Chu. 2020. Synthesis of a Spatial RRSS Mechanism for Path Generation Using the Numerical Atlas Method. Journal of Mechanical Design 142, 1 (2020), 012303:1–012303:12.
15. Dominik Mannhart, Fabio Dubois, Karen Bodie, Victor Klemm, Alessandro Morra, and Marco Hutter. 2020. CAMI – Analysis, Design and Realization of a Force-Compliant Variable Cam System. In Proc. IEEE Int. Conf. on Robotics and Automation. 850–856.
16. Vittorio Megaro, Bernhard Thomaszewski, Damien Gauge, Eitan Grinspun, Stelian Coros, and Markus Gross. 2014. ChaCra: An Interactive Design System for Rapid Character Crafting. In Proc. ACM SIGGRAPH/Eurographics Symp. on Computer Animation. 123–130.
17. J. P. Merlet. 2006. Jacobian, Manipulability, Condition Number, and Accuracy of Parallel Robots. Journal of Mechanical Design 128, 1 (2006), 199–206.
18. D. Mundo, G. Gatti, and D.B. Dooner. 2009. Optimized Five-bar Linkages with Non-circular Gears for Exact Path Generation. Mechanism and Machine Theory 44, 4 (2009), 751–760.
19. D. Mundo, J. Y. Liu, and H. S. Yan. 2006. Optimal Synthesis of Cam-Linkage Mechanisms for Precise Path Generation. Journal of Mechanical Design 128, 6 (2006), 1253–1260.
20. G. Nishida, A. Bousseau, and D. G. Aliaga. 2019. Multi-Pose Interactive Linkage Design. Comp. Graph. Forum (Eurographics) 38, 2 (2019), 277–289.
21. Zherong Pan, Min Liu, Xifeng Gao, and Dinesh Manocha. 2019. Globally Optimal Joint Search of Topology and Trajectory for Planar Linkages. In International Symposium on Robotics Research. 1–16.
22. Robin Roussel, Marie-Paule Cani, Jean-Claude Léon, and Niloy J. Mitra. 2018. Exploratory Design of Mechanical Devices with Motion Constraints. Comp. & Graph. (Computational Fabrication) 74 (2018), 244–256.
23. Kevin Russell, Qiong Shen, and Raj S. Sodhi. 2014. Mechanism Design: Visual and Programmable Approaches. CRC Press.
24. Yesh Pal Singh. 1981. Synthesis of Cam-Link Mechanisms for Exact Path Generation. Mechanism and Machine Theory 16, 4 (1981), 447–457.
25. Peng Song, Xiaofei Wang, Xiao Tang, Chi-Wing Fu, Hongfei Xu, Ligang Liu, and Niloy J. Mitra. 2017. Computational Design of Wind-up Toys. ACM Trans. on Graph. (SIGGRAPH Asia) 36, 6 (2017), 238:1–238:13.
26. J. W. Sun, D. Q. Mu, and J. K. Chu. 2012. Fourier Series Method for Path Generation of RCCC Mechanism. Proc. of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science 226, 3 (2012), 816–827.
27. Takuto Takahashi and Hiroshi G. Okuno. 2018. Design and Implementation of Programmable Drawing Automata based on Cam Mechanisms for Representing Spatial Trajectory. In Proc. IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems. 450–455.
28. Bernhard Thomaszewski, Stelian Coros, Damien Gauge, Vittorio Megaro, Eitan Grinspun, and Markus Gross. 2014. Computational Design of Linkage-Based Characters. ACM Trans. on Graph. (SIGGRAPH) 33, 4 (2014), 64:1–64:9.
29. John J. Uicker, Gordon R. Pennock, and Joseph E. Shigley. 2016. Theory of Machines and Mechanisms (5th Edition). Oxford University Press.
30. C. W. Wampler, A. P. Morgan, and A. J. Sommese. 1992. Complete Solution of the Nine-Point Path Synthesis Problem for Four-Bar Linkages. Journal of Mechanical Design 114, 1 (1992), 153–159.
31. Hao Xu, Tianwen Fu, Peng Song, Mingjun Zhou, Chi-Wing Fu, and Niloy J. Mitra. 2020. Computational Design and Optimization of Non-Circular Gears. Comp. Graph. Forum (Eurographics) 39, 2 (2020), 399–409.
32. Hongyi Xu, Espen Knoop, Stelian Coros, and Moritz Bächer. 2018. Bend-It: Design and Fabrication of Kinetic Wire Characters. ACM Trans. on Graph. (SIGGRAPH Asia) 37, 6 (2018), 239:1–239:15.
33. Tsuneo Yoshikawa. 1985. Dynamic Manipulability of Robot Manipulators. In Proc. IEEE Int. Conf. on Robotics and Automation. 1033–1038.
34. Lifeng Zhu, Weiwei Xu, John Snyder, Yang Liu, Guoping Wang, and Baining Guo. 2012. Motion-Guided Mechanical Toy Modeling. ACM Trans. on Graph. (SIGGRAPH Asia) 31, 6 (2012), 127:1–127:10.