“HAPTIC PLASTeR: Soft, Thin, Light, and Flexible Haptic Display Using DEA Composed of Slide-Ring Material for Daily Life” by Kurogi, Yonehara, Peiris, Fujiwara and Minamizawa
Conference:
Experience Type(s):
Title:
- HAPTIC PLASTeR: Soft, Thin, Light, and Flexible Haptic Display Using DEA Composed of Slide-Ring Material for Daily Life
Program Title:
- New Technologies Research & Education Adaptive Technology
Organizer(s)/Presenter(s):
Description:
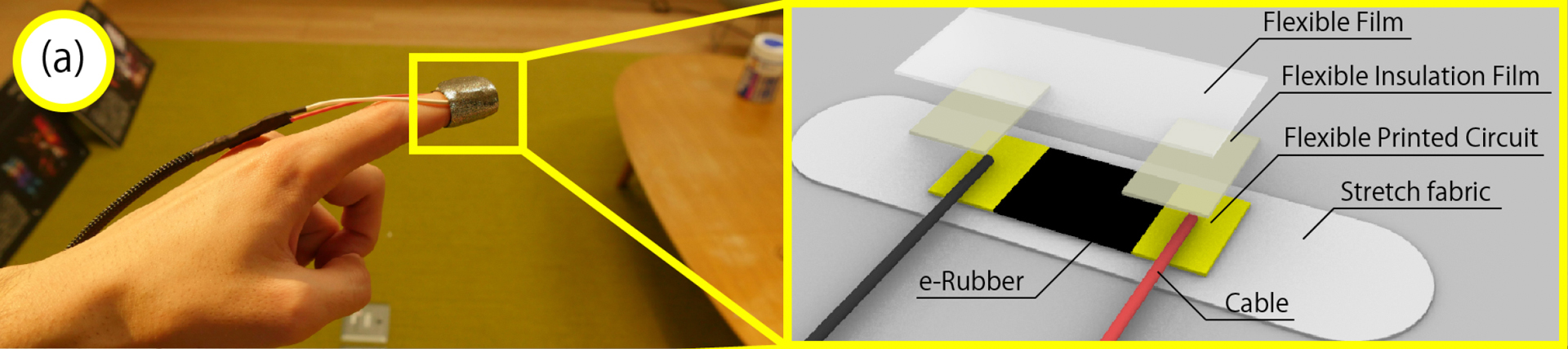
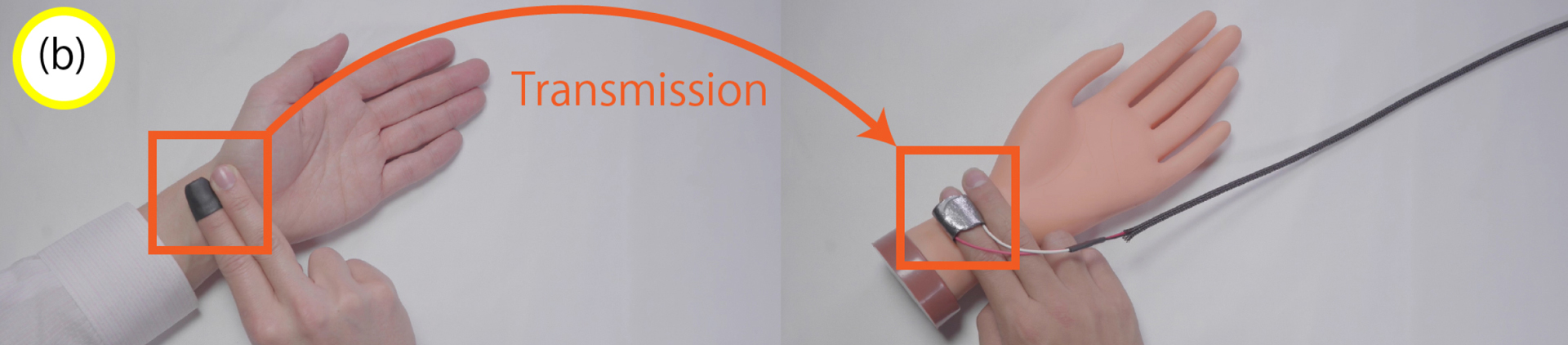
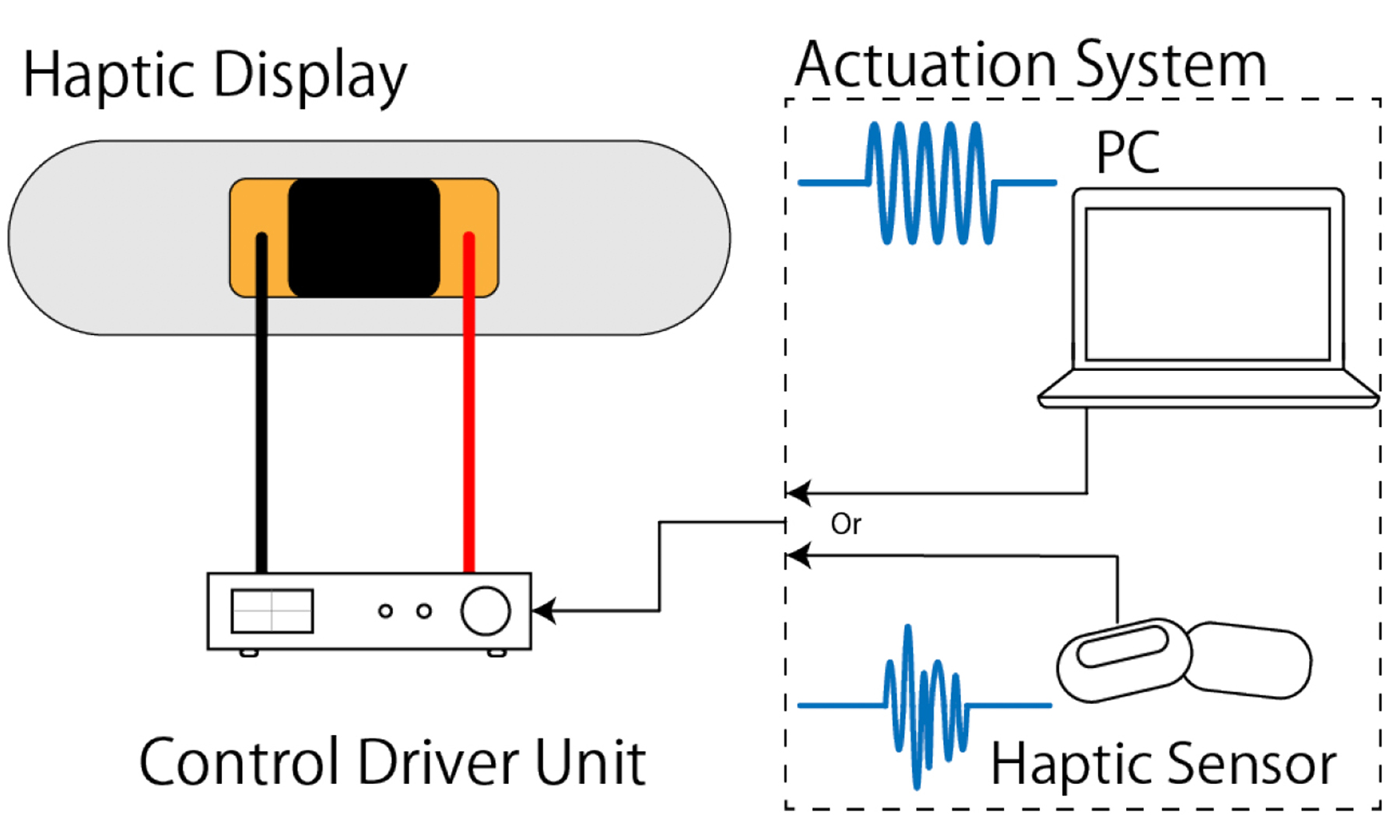
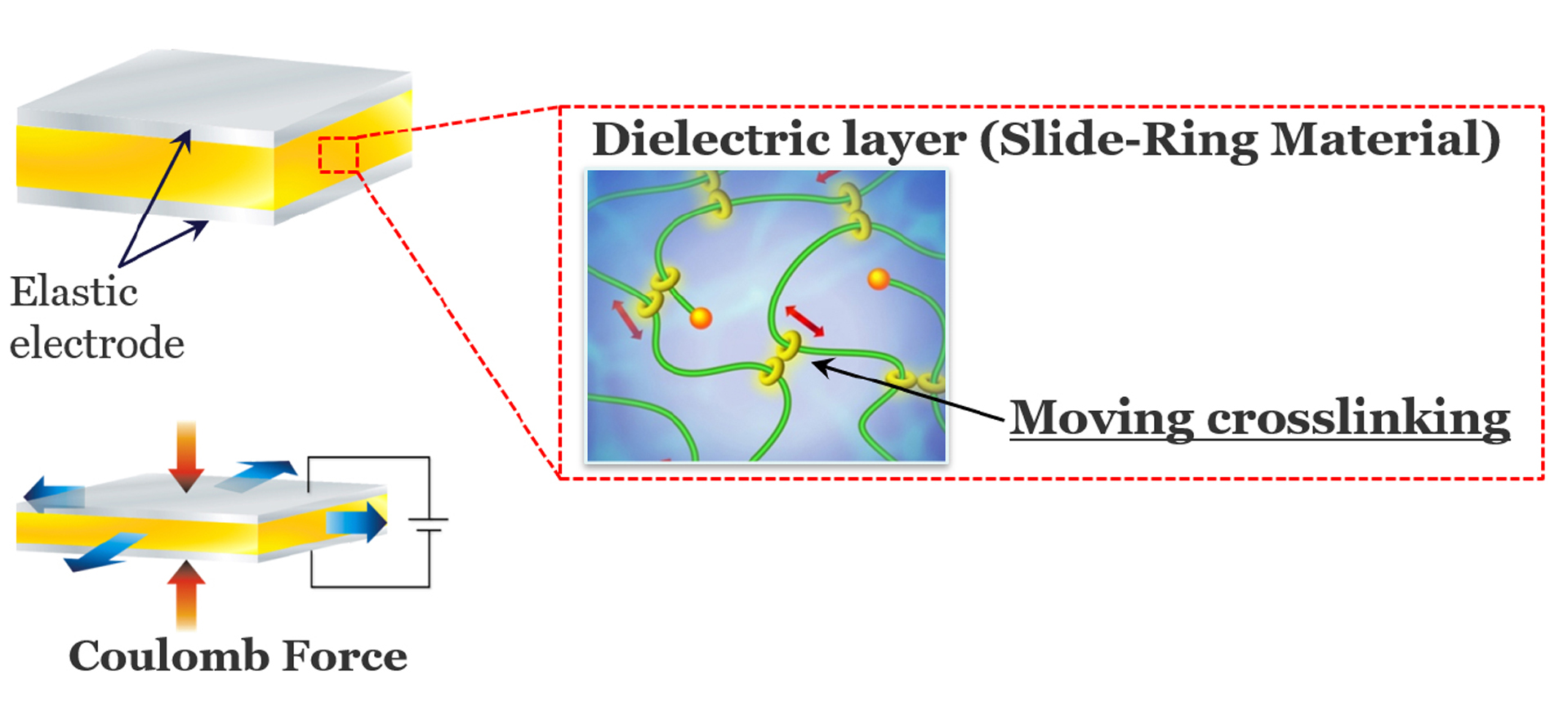
We present a soft, thin, and flexible haptic display that uses the dielectric elastomer actuator called e-Rubber, which is composed of slide-ring polymer material (SRM). In this research, we propose application examples that demonstrate the flexibility and wearability of the haptic display.
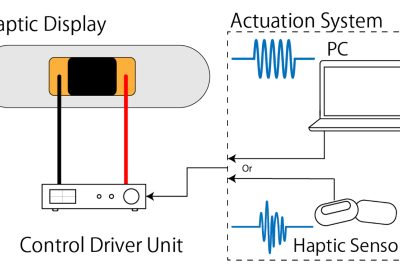
Recently, many wearable haptic displays have been widely explored aiming the enriched user experience through various application such as the virtual reality (VR) and Telexistence. Many such proposed wearable haptic displays so far are composed of rigid materials such as motors, voice coil actuators and speakers [Minamizawa et al. 2007]. Therefore, in recent years, haptic displays composed of soft materials such as dielectric elastomer actuators (DEAs) have been proposed [Koo et al. 2008; Park et al. 2015]. However, the polymers used in such DEAs have hysteresis-loss property as a main physical limitation, which results in different output displacement property during the actuation cycles. In addition, these DEAs consist of a property that requires “pre-stretching”, i.e., a strong force is required at the time of initial actuation. As such, these properties requires specialized actuation mechanisms for DEAs to be widely used as haptic displays.
References:
[1] Kohzo Ito. 2007. Novel cross-linking concept of polymer network: synthesis, structure, and properties of slide-ring gels with freely movable junctions. Polymer journal 39, 6 (2007).
[2] Ig Mo Koo, Kwangmok Jung, Ja Choon Koo, Jae-Do Nam, Young Kwan Lee, and Hyouk Ryeol Choi. 2008. Development of Soft-Actuator-Based Wearable Tactile Display. IEEE Transactions on Robotics 24, 3 (2008).
[3] Kouta Minamizawa, Souichiro Fukamachi, Hiroyuki Kajimoto, Naoki Kawakami, and Susumu Tachi. 2007. Gravity Grabber: Wearable Haptic Display to present Virtual Mass Sensation. In ACM SIGGRAPH. ACM.
[4] Won-Hyeong Park, Tae-Heon Yang, Yongjae Yoo, Seungmoon Choi, and Sang-Youn Kim. 2015. Flexible and Bendable Vibrotactile Actuator Using Electro-conductive Polyurethane. In World Haptics Conference. IEEE.
Additional Images:
-

- 2019 ETech Kurogi: HAPTIC PLASTeR: Soft, Thin, Light and Flexible Haptic Display using DEA Composed of Slide-Ring Material for Daily Life

-

- 2019 ETech Kurogi: HAPTIC PLASTeR: Soft, Thin, Light and Flexible Haptic Display using DEA Composed of Slide-Ring Material for Daily Life

-
- 2019 ETech Kurogi: HAPTIC PLASTeR: Soft, Thin, Light and Flexible Haptic Display using DEA Composed of Slide-Ring Material for Daily Life
-
- 2019 ETech Kurogi: HAPTIC PLASTeR: Soft, Thin, Light and Flexible Haptic Display using DEA Composed of Slide-Ring Material for Daily Life
-
- 2019 ETech Kurogi: HAPTIC PLASTeR: Soft, Thin, Light and Flexible Haptic Display using DEA Composed of Slide-Ring Material for Daily Life

-
- 2019 ETech Kurogi: HAPTIC PLASTeR: Soft, Thin, Light and Flexible Haptic Display using DEA Composed of Slide-Ring Material for Daily Life
-
- 2019 ETech Kurogi: HAPTIC PLASTeR: Soft, Thin, Light and Flexible Haptic Display using DEA Composed of Slide-Ring Material for Daily Life