
“C·ASE: Learning Conditional Adversarial Skill Embeddings for Physics-based Characters” by Dou, Chen, Fan, Komura and Wang
Conference:
Type(s):
Title:
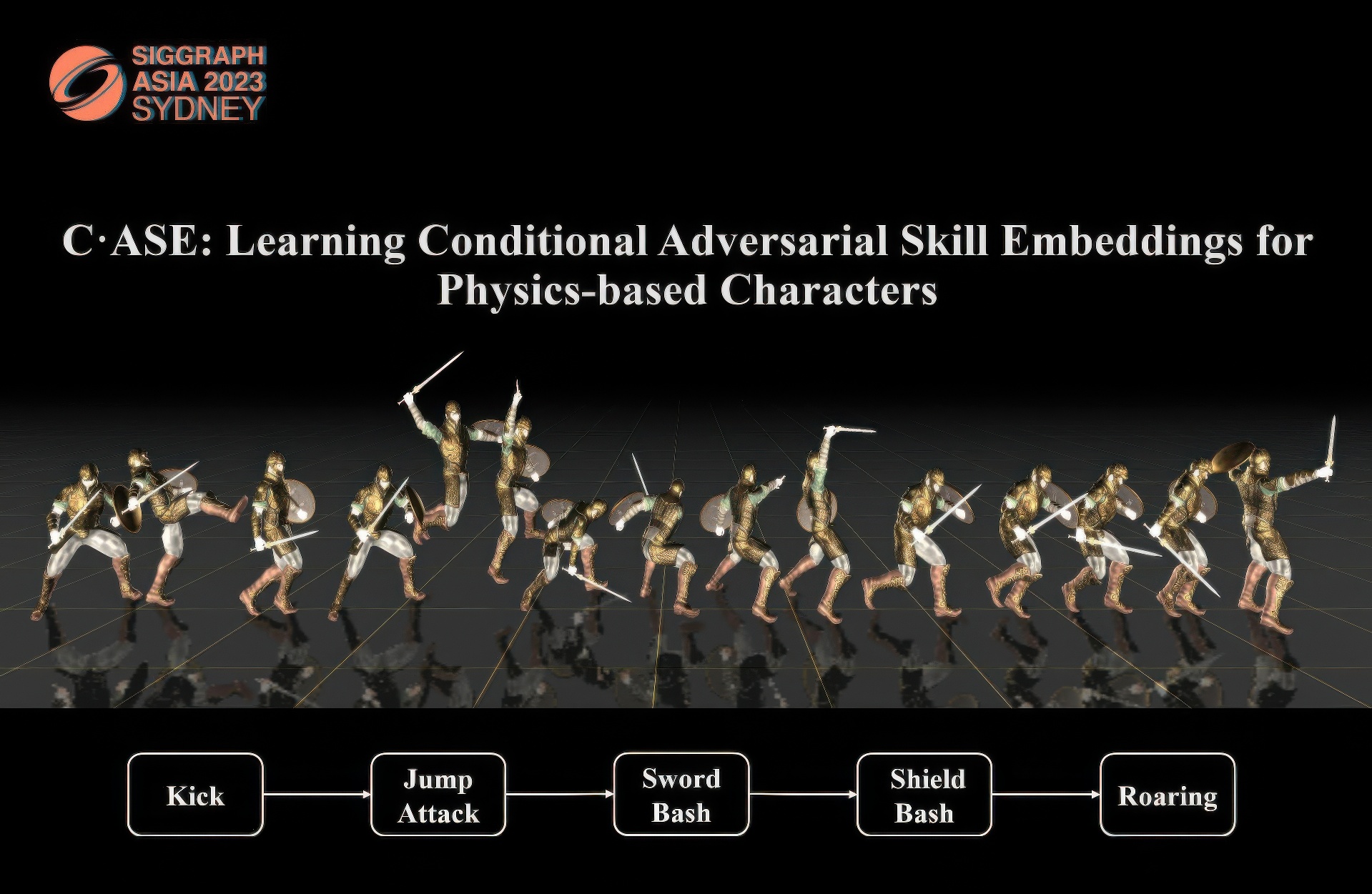
- C·ASE: Learning Conditional Adversarial Skill Embeddings for Physics-based Characters
Session/Category Title:
- Character and Rigid Body Control
Presenter(s)/Author(s):
Abstract:
We present C·ASE, an efficient and effective framework that learns conditional Adversarial Skill Embeddings for physics-based characters. Our physically simulated character can learn a diverse repertoire of skills while providing controllability in the form of direct manipulation of the skills to be performed. C·ASE divides the heterogeneous skill motions into distinct subsets containing homogeneous samples for training a low-level conditional model to learn conditional behavior distribution. The skill-conditioned imitation learning naturally offers explicit control over the character’s skills after training. The training course incorporates the focal skill sampling, skeletal residual forces, and element-wise feature masking to balance diverse skills of varying complexities, mitigate dynamics mismatch to master agile motions and capture more general behavior characteristics, respectively. Once trained, the conditional model can produce highly diverse and realistic skills, outperforming state-of-the-art models, and can be repurposed in various downstream tasks. In particular, the explicit skill control handle allows a high-level policy or user to direct the character with desired skill specifications, which we demonstrate is advantageous for interactive character animation.
References:
[1]
Kevin Bergamin, Simon Clavet, Daniel Holden, and James Richard Forbes. 2019. DReCon: data-driven responsive control of physics-based characters. ACM Transactions On Graphics (TOG) 38, 6 (2019), 1–11.
[2]
CMU. 2002. CMU Graphics Lab Motion Capture Database. http://mocap.cs.cmu.edu/.
[3]
Erwin Coumans. 2015. Bullet physics simulation. ACM SIGGRAPH 2015 Courses (2015).
[4]
Patrick Esser, Robin Rombach, and Bjorn Ommer. 2021. Taming transformers for high-resolution image synthesis. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 12873–12883.
[5]
Levi Fussell, Kevin Bergamin, and Daniel Holden. 2021. Supertrack: Motion tracking for physically simulated characters using supervised learning. ACM Transactions on Graphics (TOG) 40, 6 (2021), 1–13.
[6]
Félix G Harvey, Mike Yurick, Derek Nowrouzezahrai, and Christopher Pal. 2020. Robust motion in-betweening. ACM Transactions on Graphics (TOG) 39, 4 (2020), 60–1.
[7]
Mohamed Hassan, Duygu Ceylan, Ruben Villegas, Jun Saito, Jimei Yang, Yi Zhou, and Michael J Black. 2021. Stochastic scene-aware motion prediction. In Proceedings of the IEEE/CVF International Conference on Computer Vision. 11374–11384.
[8]
Jonathan Ho and Stefano Ermon. 2016. Generative adversarial imitation learning. Advances in neural information processing systems 29 (2016).
[9]
Jordan Juravsky, Yunrong Guo, Sanja Fidler, and Xue Bin Peng. 2022. PADL: Language-Directed Physics-Based Character Control. In SIGGRAPH Asia 2022 Conference Papers. 1–9.
[10]
Libin Liu and Jessica Hodgins. 2018. Learning basketball dribbling skills using trajectory optimization and deep reinforcement learning. ACM Transactions on Graphics (TOG) 37, 4 (2018), 1–14.
[11]
Qiujing Lu, Yipeng Zhang, Mingjian Lu, and Vwani Roychowdhury. 2022. Action-conditioned On-demand Motion Generation. In Proceedings of the 30th ACM International Conference on Multimedia. 2249–2257.
[12]
Naureen Mahmood, Nima Ghorbani, Nikolaus F Troje, Gerard Pons-Moll, and Michael J Black. 2019. AMASS: Archive of motion capture as surface shapes. In Proceedings of the IEEE/CVF international conference on computer vision. 5442–5451.
[13]
Viktor Makoviychuk, Lukasz Wawrzyniak, Yunrong Guo, Michelle Lu, Kier Storey, Miles Macklin, David Hoeller, Nikita Rudin, Arthur Allshire, Ankur Handa, and Gavriel State. 2021. Isaac Gym: High Performance GPU Based Physics Simulation For Robot Learning. In Proceedings of the Neural Information Processing Systems Track on Datasets and Benchmarks 1, NeurIPS Datasets and Benchmarks 2021, December 2021, virtual, Joaquin Vanschoren and Sai-Kit Yeung (Eds.). https://datasets-benchmarks-proceedings.neurips.cc/paper/2021/hash/28dd2c7955ce926456240b2ff0100bde-Abstract-round2.html
[14]
Josh Merel, Leonard Hasenclever, Alexandre Galashov, Arun Ahuja, Vu Pham, Greg Wayne, Yee Whye Teh, and Nicolas Heess. 2018. Neural probabilistic motor primitives for humanoid control. arXiv preprint arXiv:1811.11711 (2018).
[15]
Josh Merel, Saran Tunyasuvunakool, Arun Ahuja, Yuval Tassa, Leonard Hasenclever, Vu Pham, Tom Erez, Greg Wayne, and Nicolas Heess. 2020. Catch & Carry: reusable neural controllers for vision-guided whole-body tasks. ACM Transactions on Graphics (TOG) 39, 4 (2020), 39–1.
[16]
Soohwan Park, Hoseok Ryu, Seyoung Lee, Sunmin Lee, and Jehee Lee. 2019. Learning predict-and-simulate policies from unorganized human motion data. ACM Transactions on Graphics (TOG) 38, 6 (2019), 1–11.
[17]
Xue Bin Peng, Pieter Abbeel, Sergey Levine, and Michiel Van de Panne. 2018. Deepmimic: Example-guided deep reinforcement learning of physics-based character skills. ACM Transactions On Graphics (TOG) 37, 4 (2018), 1–14.
[18]
Xue Bin Peng, Michael Chang, Grace Zhang, Pieter Abbeel, and Sergey Levine. 2019. Mcp: Learning composable hierarchical control with multiplicative compositional policies. Advances in Neural Information Processing Systems 32 (2019).
[19]
Xue Bin Peng, Yunrong Guo, Lina Halper, Sergey Levine, and Sanja Fidler. 2022. ASE: Large-Scale Reusable Adversarial Skill Embeddings for Physically Simulated Characters. ACM Transactions on Graphics (TOG) 41, 4, Article 94 (jul 2022), 17 pages. https://doi.org/10.1145/3528223.3530110
[20]
Xue Bin Peng, Ze Ma, Pieter Abbeel, Sergey Levine, and Angjoo Kanazawa. 2021. Amp: Adversarial motion priors for stylized physics-based character control. ACM Transactions on Graphics (TOG) 40, 4 (2021), 1–20.
[21]
Alec Radford, Jong Wook Kim, Chris Hallacy, Aditya Ramesh, Gabriel Goh, Sandhini Agarwal, Girish Sastry, Amanda Askell, Pamela Mishkin, Jack Clark, 2021. Learning transferable visual models from natural language supervision. In International conference on machine learning. PMLR, 8748–8763.
[22]
John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. 2017. Proximal Policy Optimization Algorithms. CoRR abs/1707.06347 (2017). arXiv:1707.06347http://arxiv.org/abs/1707.06347
[23]
NUS SFU. 2011. SFU Motion Capture Database. https://mocap.cs.sfu.ca/.
[24]
Yi Shi, Jingbo Wang, Xuekun Jiang, and Bo Dai. 2023. Controllable Motion Diffusion Model. arXiv preprint arXiv:2306.00416 (2023).
[25]
Jiaming Song, Chenlin Meng, and Stefano Ermon. 2020. Denoising Diffusion Implicit Models. In International Conference on Learning Representations.
[26]
Chen Tessler, Yoni Kasten, Yunrong Guo, Shie Mannor, Gal Chechik, and Xue Bin Peng. 2023. CALM: Conditional Adversarial Latent Models for Directable Virtual Characters. arXiv preprint arXiv:2305.02195 (2023).
[27]
Guy Tevet, Sigal Raab, Brian Gordon, Yonatan Shafir, Daniel Cohen-Or, and Amit H Bermano. 2022. Human motion diffusion model. arXiv preprint arXiv:2209.14916 (2022).
[28]
Emanuel Todorov, Tom Erez, and Yuval Tassa. 2012. Mujoco: A physics engine for model-based control. In 2012 IEEE/RSJ international conference on intelligent robots and systems. IEEE, 5026–5033.
[29]
Shuhei Tsuchida, Satoru Fukayama, Masahiro Hamasaki, and Masataka Goto. 2019. AIST Dance Video Database: Multi-Genre, Multi-Dancer, and Multi-Camera Database for Dance Information Processing. In ISMIR, Vol. 1. 6.
[30]
Jingbo Wang, Yu Rong, Jingyuan Liu, Sijie Yan, Dahua Lin, and Bo Dai. 2022. Towards Diverse and Natural Scene-aware 3D Human Motion Synthesis. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 20460–20469.
[31]
Tingwu Wang, Yunrong Guo, Maria Shugrina, and Sanja Fidler. 2020. Unicon: Universal neural controller for physics-based character motion. arXiv preprint arXiv:2011.15119 (2020).
[32]
Jungdam Won, Deepak Gopinath, and Jessica Hodgins. 2020. A scalable approach to control diverse behaviors for physically simulated characters. ACM Transactions on Graphics (TOG) 39, 4 (2020), 33–1.
[33]
Jungdam Won, Deepak Gopinath, and Jessica Hodgins. 2022. Physics-based character controllers using conditional VAEs. ACM Transactions on Graphics (TOG) 41, 4 (2022), 1–12.
[34]
Heyuan Yao, Zhenhua Song, Baoquan Chen, and Libin Liu. 2022. ControlVAE: Model-Based Learning of Generative Controllers for Physics-Based Characters. ACM Transactions on Graphics (TOG) 41, 6 (2022), 1–16.
[35]
Ye Yuan and Kris Kitani. 2020. Residual force control for agile human behavior imitation and extended motion synthesis. Advances in Neural Information Processing Systems 33 (2020), 21763–21774.