
“Block assembly for global registration of building scans” by Yan, Nan and Wonka
Conference:
Type(s):
Title:
- Block assembly for global registration of building scans
Session/Category Title:
- Data Driven Modeling
Presenter(s)/Author(s):
Abstract:
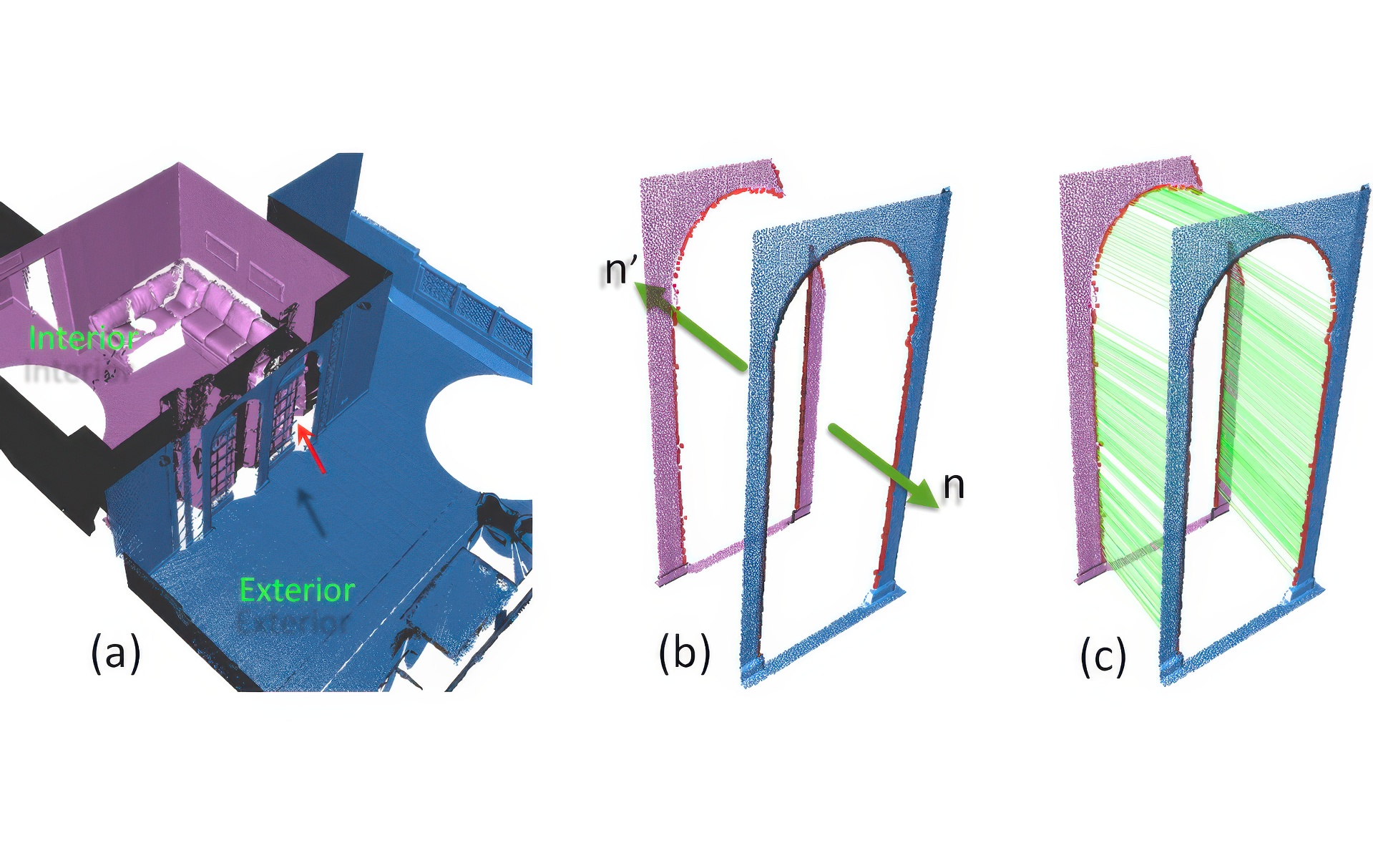
We propose a framework for global registration of building scans. The first contribution of our work is to detect and use portals (e.g., doors and windows) to improve the local registration between two scans. Our second contribution is an optimization based on a linear integer programming formulation. We abstract each scan as a block and model the blocks registration as an optimization problem that aims at maximizing the overall matching score of the entire scene. We propose an efficient solution to this optimization problem by iteratively detecting and adding local constraints. We demonstrate the effectiveness of the proposed method on buildings of various styles and that our approach is superior to the current state of the art.
References:
1. Aiger, D., Mitra, N. J., and Cohen-Or, D. 2008. 4-points congruent sets for robust pairwise surface registration. In ACM Transactions on Graphics, vol. 27, 85.
2. Besl, P. J., and McKay, N. D. 1992. Method for registration of 3-d shapes. In Robotics-DL tentative, International Society for Optics and Photonics, 586–606.
3. Bochkanov, S., 2015. Alglib library. http://www.alglib.net/.
4. Brown, B., and Rusinkiewicz, S. 2007. Global non-rigid alignment of 3-D scans. SIGGRAPH 26, 3 (Aug.).
5. Chen, J., Bautembach, D., and Izadi, S. 2013. Scalable real-time volumetric surface reconstruction. ACM Transactions on Graphics 32, 4, 113.
6. Choi, S., Zhou, Q.-Y., and Koltun, V. 2015. Robust reconstruction of indoor scenes. In CVPR, 5556–5565.
7. Cutler, W. 1978. The six-piece burr. Journal of Recreational Mathematics 10, 4, 241–250.
8. Dardari, D., Closas, P., and Djuric, P. M. 2015. Indoor tracking: Theory, methods, and technologies. Vehicular Technology, IEEE Transactions on 64, 4, 1263–1278. Cross Ref
9. Fu, H., Cohen-Or, D., Dror, G., and Sheffer, A. 2008. Upright orientation of man-made objects. In ACM transactions on graphics, vol. 27, 42.
10. Fu, C.-W., Song, P., Yan, X., Yang, L. W., Jayaraman, P. K., and Cohen-Or, D. 2015. Computational interlocking furniture assembly. ACM Trans. Graph. 34, 4 (July), 91:1–91:11.
11. Gelfand, N., Mitra, N. J., Guibas, L. J., and Pottmann, H. 2005. Robust global registration. In SGP, vol. 2, 5.
12. Ghanem, B., Thabet, A., Carlos Niebles, J., and Caba Heilbron, F. 2015. Robust manhattan frame estimation from a single rgb-d image. In CVPR, 3772–3780.
13. GPS.gov, 2015. Gps accuracy. http://www.gps.gov/systems/gps/performance/accuracy/.
14. Gurobi, 2015. Gurobi optimization. http://www.gurobi.com/.
15. Harris, C., and Stephens, M. 1988. A combined corner and edge detector. In Alvey vision conference, vol. 15, Citeseer, 50.
16. Horn, B. K. 1987. Closed-form solution of absolute orientation using unit quaternions. JOSA A 4, 4, 629–642. Cross Ref
17. Huang, Q.-X., Flöry, S., Gelfand, N., Hofer, M., and Pottmann, H. 2006. Reassembling fractured objects by geometric matching. ACM Transactions on Graphics 25, 3, 569–578.
18. Huang, P., Budd, C., and Hilton, A. 2011. Global temporal registration of multiple non-rigid surface sequences. In CVPR, IEEE, 3473–3480.
19. Huang, H., Gong, M., Cohen-Or, D., Ouyang, Y., Tan, F., and Zhang, H. 2012. Field-guided registration for feature-conforming shape composition. ACM Transactions on Graphics 31, 6, 179.
20. Huber, D. F., and Hebert, M. 2003. Fully automatic registration of multiple 3d data sets. Image and Vision Computing 21, 7, 637–650. Cross Ref
21. Huber, D. F. 2002. Automatic three-dimensional modeling from reality. PhD thesis, Carnegie Mellon University Pittsburgh.
22. Izadi, S., Kim, D., Hilliges, O., Molyneaux, D., Newcombe, R., Kohli, P., Shotton, J., Hodges, S., Freeman, D., Davison, A., et al. 2011. Kinectfusion: real-time 3d reconstruction and interaction using a moving depth camera. In UIST, ACM, 559–568.
23. Jian, B., and Vemuri, B. C. 2011. Robust point set registration using gaussian mixture models. IEEE Transactions on Pattern Analysis and Machine Intelligence 33, 8, 1633–1645.
24. Kahler, O., Prisacariu, V. A., Ren, C. Y., Sun, X., Torr, P. H. S., and Murray, D. W. Very High Frame Rate Volumetric Integration of Depth Images on Mobile Device. IEEE Transactions on Visualization and Computer Graphics.
25. Li, H., Sumner, R. W., and Pauly, M. 2008. Global correspondence optimization for non-rigid registration of depth scans. In Computer graphics forum, vol. 27, Wiley Online Library, 1421–1430.
26. Liu, Y.-S., and Ramani, K. 2009. Robust principal axes determination for point-based shapes using least median of squares. Computer-Aided Design 41, 4, 293–305.
27. Matterport, 2016. Matterport 3d models of real interior spaces. https://matterport.com/.
28. Nan, L., Sharf, A., Zhang, H., Cohen-Or, D., and Chen, B. 2010. Smartboxes for interactive urban reconstruction. In SIGGRAPH, ACM, SIGGRAPH, 93:1–93:10.
29. Newcombe, R. A., Izadi, S., Hilliges, O., Molyneaux, D., Kim, D., Davison, A. J., Kohi, P., Shotton, J., Hodges, S., and Fitzgibbon, A. 2011. Kinectfusion: Real-time dense surface mapping and tracking. In Mixed and augmented reality (ISMAR), IEEE, 127–136.
30. Niessner, M., Zollhöfer, M., Izadi, S., and Stamminger, M. 2013. Real-time 3d reconstruction at scale using voxel hashing. ACM Transactions on Graphics 32, 6, 169.
31. Pauly, M., Keiser, R., and Gross, M. 2003. Multi-scale feature extraction on point-sampled surfaces. In Computer graphics forum, vol. 22, 281–289.
32. Roth, H., and Vona, M. 2012. Moving volume kinectfusion. In BMVC, 1–11.
33. Rueckert, D., Sonoda, L. I., Hayes, C., Hill, D. L., Leach, M. O., and Hawkes, D. J. 1999. Nonrigid registration using free-form deformations: application to breast mr images. IEEE Transactions on Medical Imaging 18, 8, 712–721. Cross Ref
34. Rusinkiewicz, S., and Levoy, M. 2001. Efficient variants of the icp algorithm. In 3-D Digital Imaging and Modeling, IEEE, 145–152.
35. Rusu, R. B., and Cousins, S. 2011. 3d is here: Point cloud library (pcl). In International Conference on Robotics and Automation.
36. Schenk, E., and Guittard, C. 2009. Crowdsourcing: What can be outsourced to the crowd, and why. In Workshop on Open Source Innovation.
37. Schnabel, R., Wahl, R., and Klein, R. 2007. Efficient ransac for point-cloud shape detection. In Computer graphics forum, vol. 26, 214–226.
38. Scott, W. R., Roth, G., and Rivest, J.-F. 2003. View planning for automated three-dimensional object reconstruction and inspection. ACM Comput. Surv. 35, 1 (Mar.), 64–96.
39. Segal, A., Haehnel, D., and Thrun, S. 2009. Generalized-icp. In Robotics: Science and Systems, vol. 2.
40. Sharp, G. C., Lee, S. W., and Wehe, D. K. 2004. Multiview registration of 3d scenes by minimizing error between coordinate frames. IEEE Transactions on Pattern Analysis and Machine Intelligence 26, 8, 1037–1050.
41. Tam, G. K., Cheng, Z.-Q., Lai, Y.-K., Langbein, F. C., Liu, Y., Marshall, D., Martin, R. R., Sun, X.-F., and Rosin, P. L. 2013. Registration of 3d point clouds and meshes: a survey from rigid to nonrigid. IEEE Transactions on Visualization and Computer Graphics 19, 7, 1199–1217.
42. Theiler, P. W., Wegner, J. D., and Schindler, K. 2015. Globally consistent registration of terrestrial laser scans via graph optimization. ISPRS Journal of Photogrammetry and Remote Sensing 109, 126–138. Cross Ref
43. Whelan, T., Kaess, M., Fallon, M., Johannsson, H., Leonard, J., and McDonald, J. 2012. Kintinuous: Spatially extended kinectfusion.
44. Wu, S., Sun, W., Long, P., Huang, H., Cohen-Or, D., Gong, M., Deussen, O., and Chen, B. 2014. Quality-driven poisson-guided autoscanning. ACM Trans. Graph. 33, 6 (Nov.), 203:1–203:12.
45. Xu, K., Huang, H., Shi, Y., Li, H., Long, P., Caichen, J., Sun, W., and Chen, B. 2015. Autoscanning for coupled scene reconstruction and proactive object analysis. ACM Trans. Graph. 34, 6 (Oct.), 177:1–177:14.
46. Yan, F., Sharf, A., Lin, W., Huang, H., and Chen, B. 2014. Proactive 3d scanning of inaccessible parts. ACM Trans. Graph. 33, 4 (July), 157:1–157:8.
47. Zhou, Q.-Y., and Koltun, V. 2013. Dense scene reconstruction with points of interest. ACM Trans. Graph. 32, 4 (July), 112:1–112:8.